
基于光纤陀螺仪的掘进机导向系统及方法.pdf

一吃****天材


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于光纤陀螺仪的掘进机导向系统及方法.pdf
本发明涉及一种基于光纤陀螺仪的掘进机导向方法及系统,该方法包括如下步骤:提供光纤陀螺仪,将光纤陀螺仪安装在掘进机上;提供静力水准仪,将静力水准仪靠近光纤陀螺仪安装在掘进机上;在掘进机掘进的过程中,通过光纤陀螺仪获取掘进机的实时姿态数据,通过静力水准仪获取掘进机的水平落差数据;以及依据所获取的实时姿态数据和水平落差数据计算得到掘进机的实际掘进路径,并通过实际掘进路径与掘进机的设计路径计算得出掘进机的推进路线,利用推进路线控制掘进机向前掘进以实现掘进机的导向。本发明利用设置的光纤陀螺仪直接获取掘进机的空间姿态

基于光纤陀螺仪的油井测绘系统.pdf
基于光纤陀螺仪的油井测绘系统吕伟;李玮燕;张龙;郭双红【摘要】Gyroscopeinclinometerisakindofwelltrajectorysurveyinginstrument.Duringthemeasuringprocess,itusesinertialtransducerstosensethegravityandthreedimensionalrotationsoftheearth,andthenusesthestrapdowninertialnavigationalgorithmtog

基于大型光纤陀螺仪的世界时解算方法研究.docx
基于大型光纤陀螺仪的世界时解算方法研究基于大型光纤陀螺仪的世界时解算方法研究摘要:随着现代科技的迅猛发展,精确的时间尺度对各个领域的科学研究和实践应用都显得至关重要。世界时作为一种国际标准时间尺度,其精度和稳定性对于各种应用场景来说至关重要。本论文以大型光纤陀螺仪为基础,研究了一种基于大型光纤陀螺仪的世界时解算方法,通过实验验证了该方法的可行性和准确性。关键词:大型光纤陀螺仪、世界时、解算方法、精度、稳定性第一章引言1.1研究背景世界时是国际上广泛应用的一种时间尺度,对于各个领域的科学研究和实践应用都起着
一种三轴光纤陀螺仪、光纤罗经及光纤罗经系统.pdf
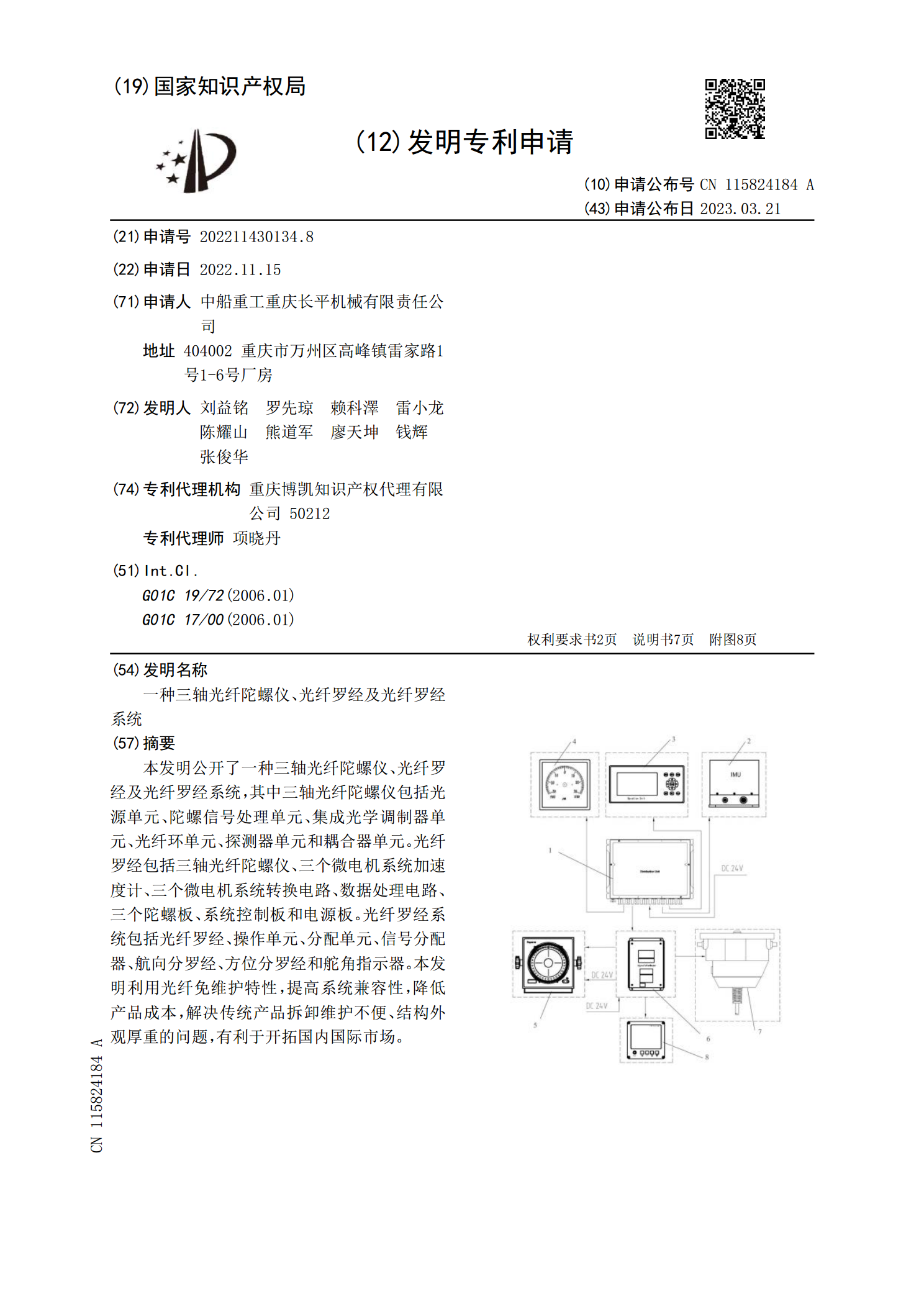
本发明公开了一种三轴光纤陀螺仪、光纤罗经及光纤罗经系统,其中三轴光纤陀螺仪包括光源单元、陀螺信号处理单元、集成光学调制器单元、光纤环单元、探测器单元和耦合器单元。光纤罗经包括三轴光纤陀螺仪、三个微电机系统加速度计、三个微电机系统转换电路、数据处理电路、三个陀螺板、系统控制板和电源板。光纤罗经系统包括光纤罗经、操作单元、分配单元、信号分配器、航向分罗经、方位分罗经和舵角指示器。本发明利用光纤免维护特性,提高系统兼容性,降低产品成本,解决传统产品拆卸维护不便、结构外观厚重的问题,有利于开拓国内国际市场。

一种飞行系统的光纤陀螺仪故障监测方法、系统、设备及介质.pdf
本发明提供一种飞行系统的光纤陀螺仪故障监测方法、系统、设备及介质,包括小波消噪预处理,提取光纤陀螺仪特征向量,特征向量进行时间权重赋值,基于深度学习的故障模式识别,输出并保存故障监测结果五个主要步骤,可以在飞机运行过程中实时监测光纤陀螺仪故障,保证飞机导航系统高精度以及飞行安全,确保飞机飞行控制系统的状态输入稳定性;针对光纤陀螺仪的突变型故障,通过神经网络模型能够高精度识别,而对于缓变性故障,对神经网络采用时间权重赋值,可以增大缓变性故障的识别精确度,及时排除故障,对于降低飞机事故的发生率及提高航空运输的