
一种基于图像处理的线圈匝数在线测量方法.pdf

论文****可爱


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于图像处理的线圈匝数在线测量方法.pdf
本发明涉及线圈测量技术领域,涉及一种基于图像处理的线圈匝数在线测量方法。本发明通过对标准测量图像和待测线圈图像的边缘区域图像进行匹配,能够有效提高识别效率,只提取边缘区域图像,只保留相关性高的图像信息,可有效减少运算量,提高了检测的实时性;本发明能够实现线圈匝数测量,节省人力成本,提高工作效率。
一种线圈匝数记录表.pdf
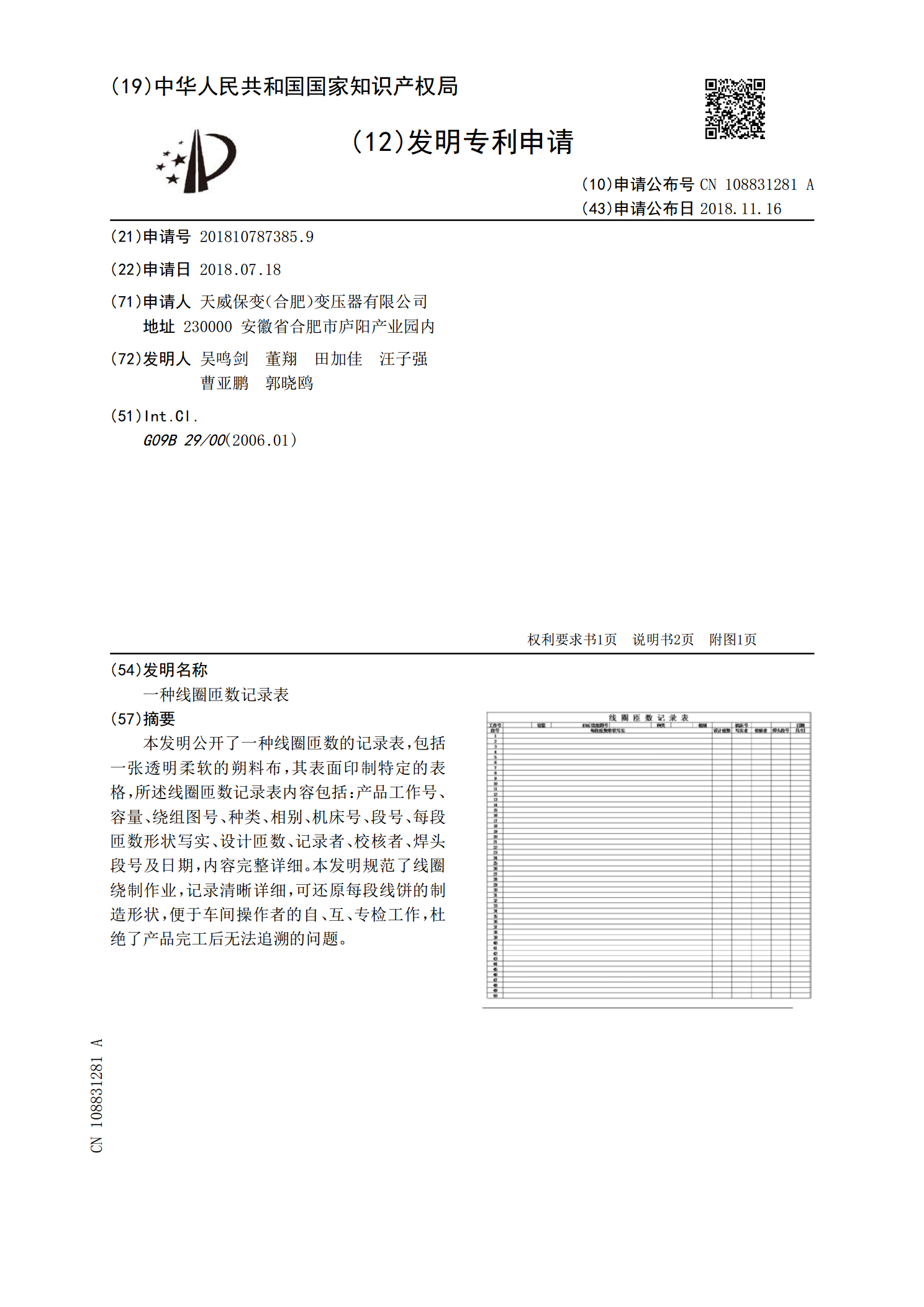
本发明公开了一种线圈匝数的记录表,包括一张透明柔软的朔料布,其表面印制特定的表格,所述线圈匝数记录表内容包括:产品工作号、容量、绕组图号、种类、相别、机床号、段号、每段匝数形状写实、设计匝数、记录者、校核者、焊头段号及日期,内容完整详细。本发明规范了线圈绕制作业,记录清晰详细,可还原每段线饼的制造形状,便于车间操作者的自、互、专检工作,杜绝了产品完工后无法追溯的问题。

一种基于图像处理的工件姿态快速测量方法.pdf
本发明涉及一种基于图像处理的工件姿态快速测量方法,属于图像测量技术领域,解决现有工件夹装过程中耗时、费力、效率低和难以达到高精度的技术问题,本发明采集一系列景深方向的图像,通过二维图像序列进行三维重建,在得到目标工件的三维重建轮廓后,通过计算加工坐标系中的前后向量得到旋转向量,进而得到旋转矩阵并求得欧拉角,由此可得知工件相对三坐标轴的旋转角度。本发明适合微小工件夹装时工件姿态的精准确定,安装拆卸方便,结构紧凑,效率高;采用非接触图像测量技术与计算机辅助分析获取待加工工件姿态信息,速度快精度高;适用于形态各
一种基于图像处理的电缆护套厚度测量方法.pdf
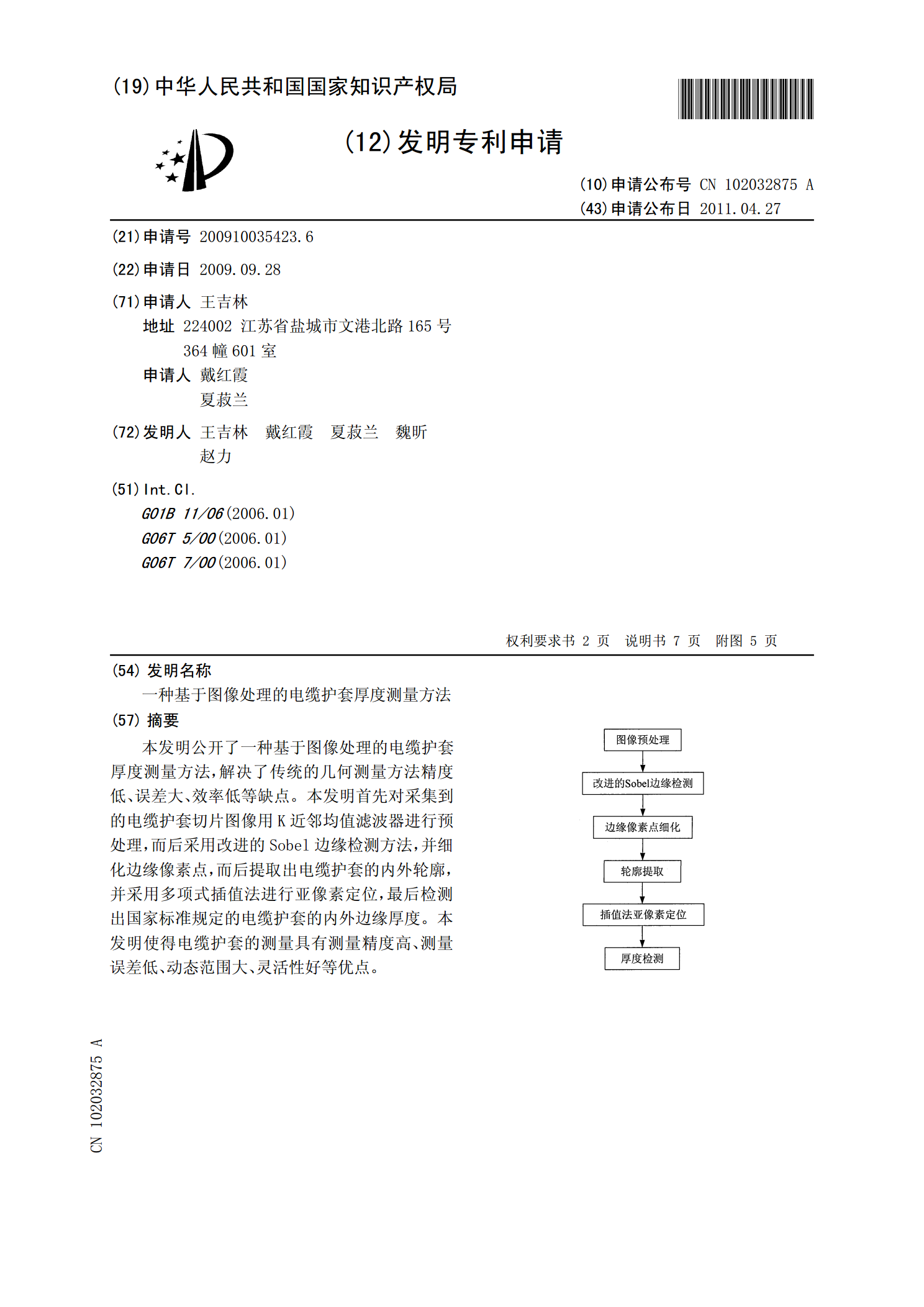
本发明公开了一种基于图像处理的电缆护套厚度测量方法,解决了传统的几何测量方法精度低、误差大、效率低等缺点。本发明首先对采集到的电缆护套切片图像用K近邻均值滤波器进行预处理,而后采用改进的Sobel边缘检测方法,并细化边缘像素点,而后提取出电缆护套的内外轮廓,并采用多项式插值法进行亚像素定位,最后检测出国家标准规定的电缆护套的内外边缘厚度。本发明使得电缆护套的测量具有测量精度高、测量误差低、动态范围大、灵活性好等优点。

一种基于图像处理的回转类刀具在机测量方法.pdf
本发明涉及测量技术领域,是一种基于图像处理的回转类刀具在机测量方法。高分辨率CCD相机连续摄取不同位置刀具的轴截面图像,再对每一个图像进行边缘检测,并提取轮廓点,存储在数组里。然后把多个轮廓进行叠加,得到回转类刀具的实际工作廓形及刀具参数。本发明可以直接在数控机床上测量出正在加工的刀具的参数,并且专门针对回转类刀具,通过叠加多幅不同相位的刀具图片,求得回转类刀具的包络廓形和刀具几何参数,可广泛应用于刀具补偿、基于刀具实际工作廓形的数控加工等领域。