
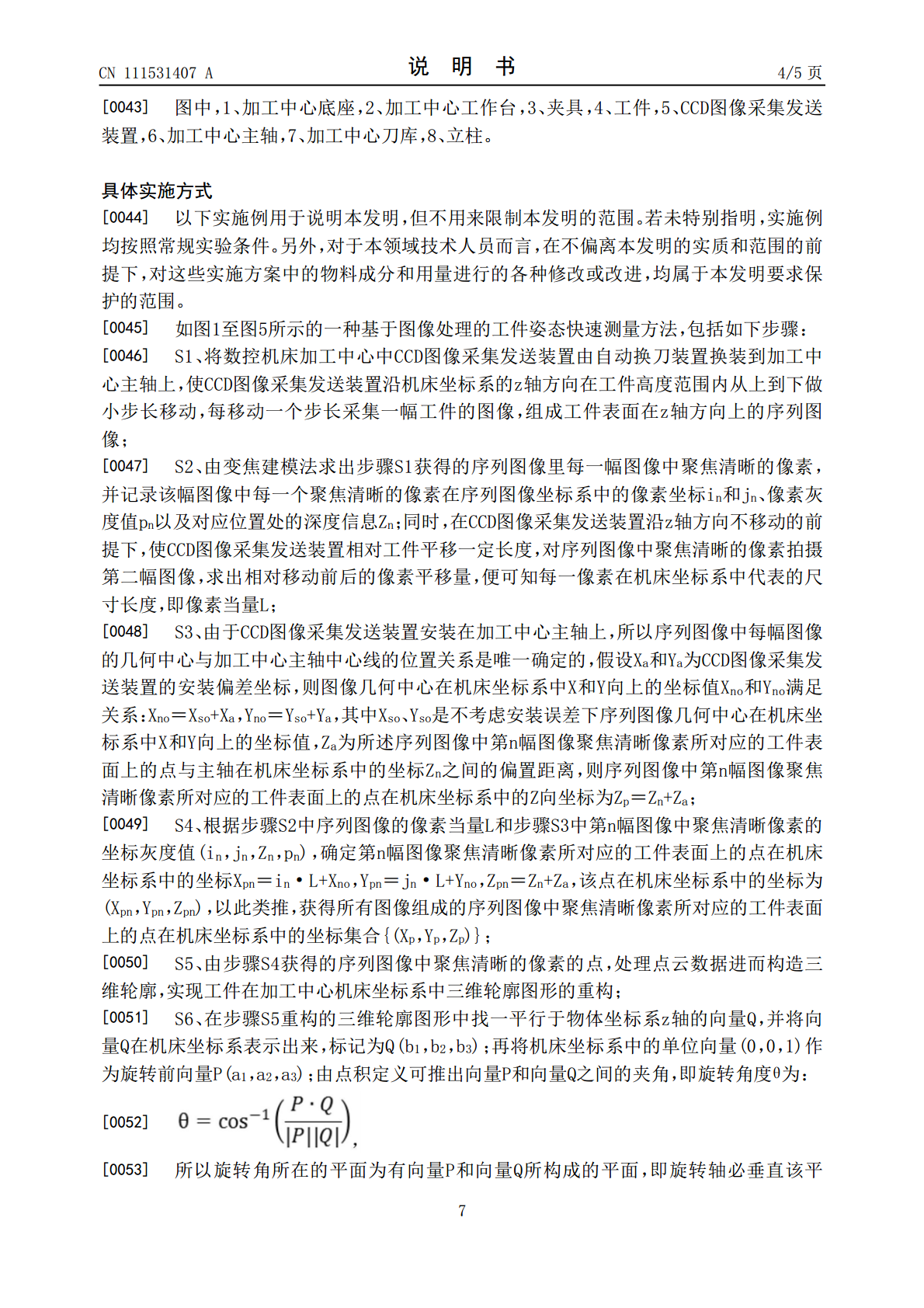
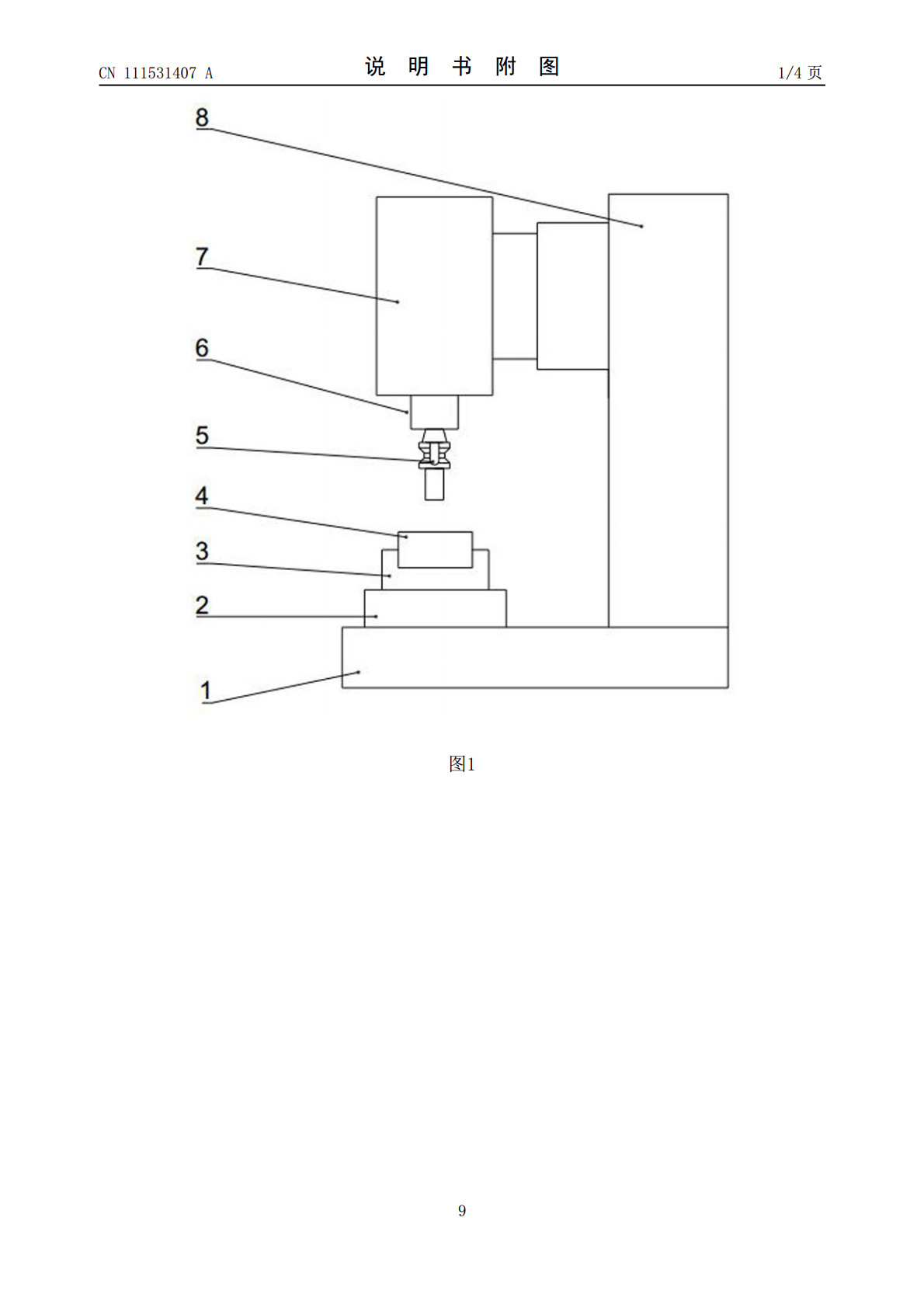
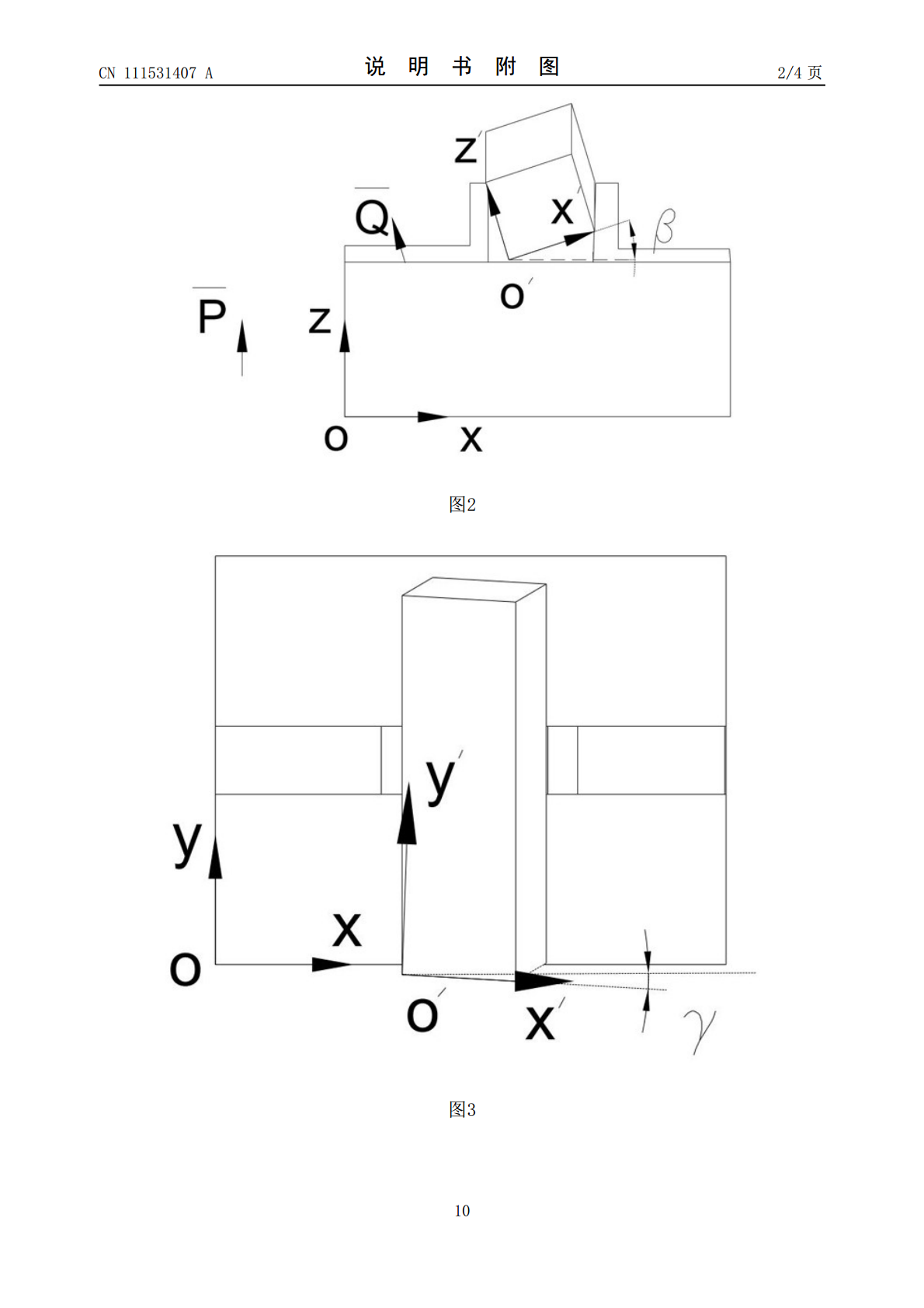
一种基于图像处理的工件姿态快速测量方法.pdf

飞舟****文章

1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于图像处理的工件姿态快速测量方法.pdf
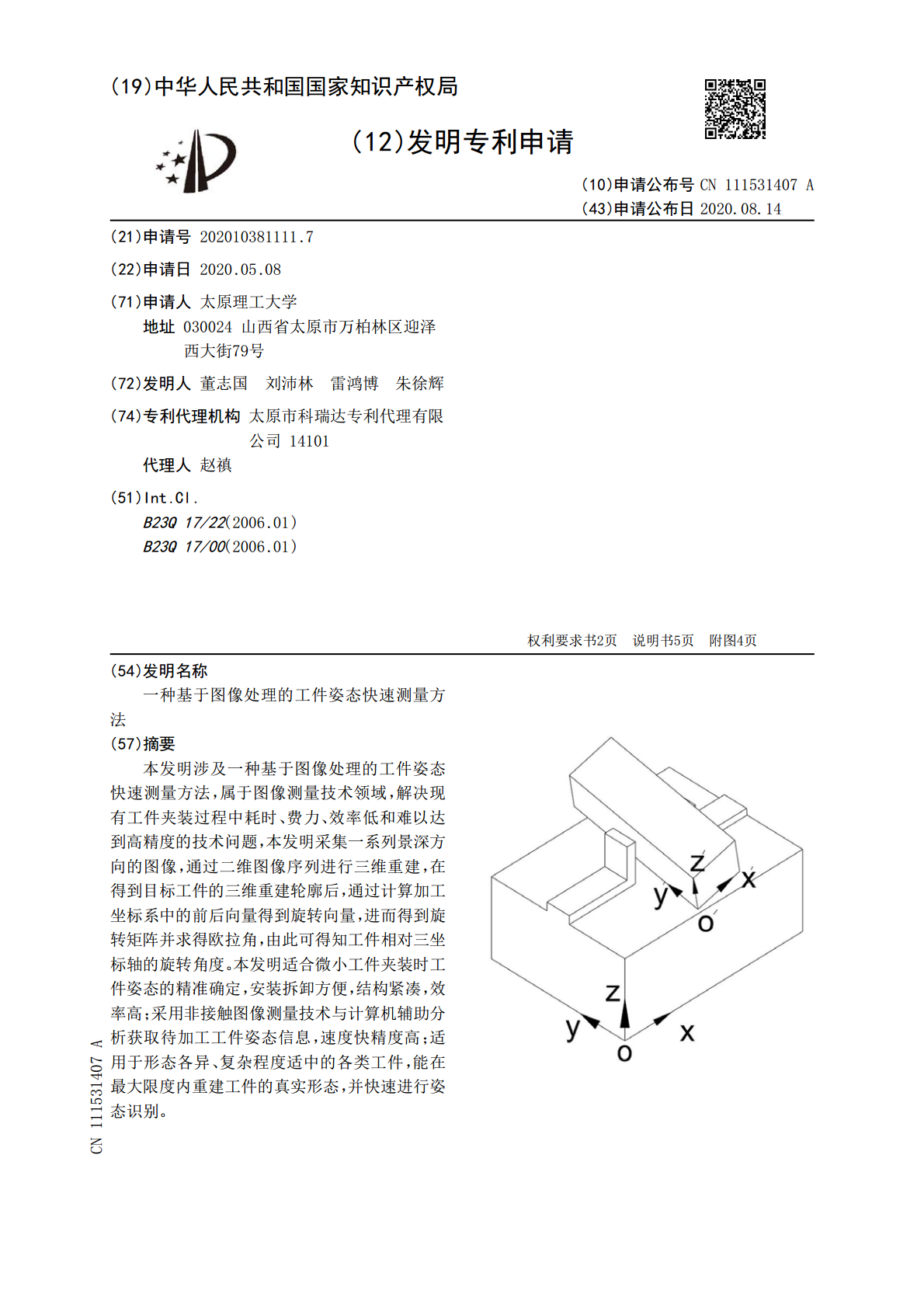
本发明涉及一种基于图像处理的工件姿态快速测量方法,属于图像测量技术领域,解决现有工件夹装过程中耗时、费力、效率低和难以达到高精度的技术问题,本发明采集一系列景深方向的图像,通过二维图像序列进行三维重建,在得到目标工件的三维重建轮廓后,通过计算加工坐标系中的前后向量得到旋转向量,进而得到旋转矩阵并求得欧拉角,由此可得知工件相对三坐标轴的旋转角度。本发明适合微小工件夹装时工件姿态的精准确定,安装拆卸方便,结构紧凑,效率高;采用非接触图像测量技术与计算机辅助分析获取待加工工件姿态信息,速度快精度高;适用于形态各
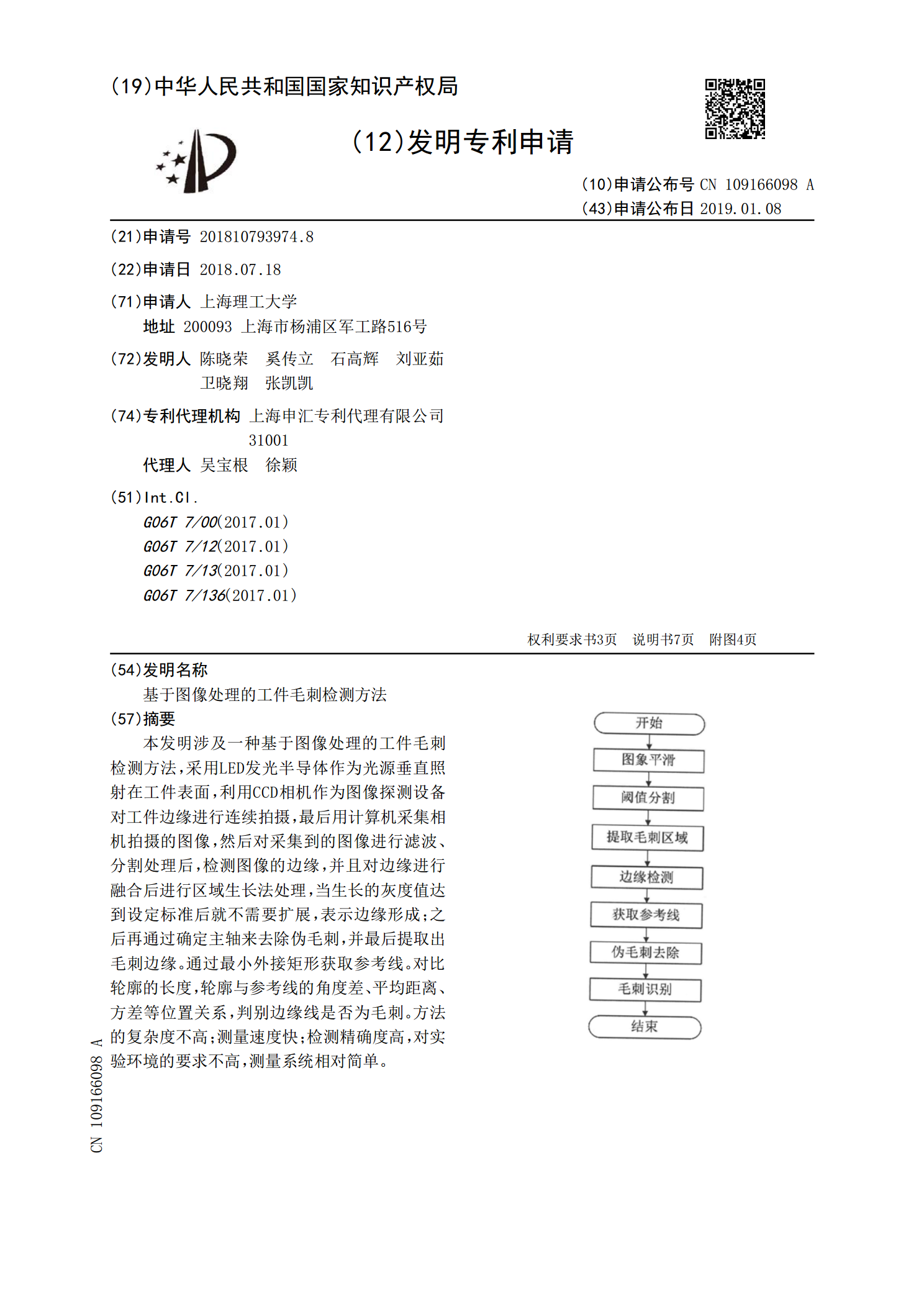
基于图像处理的工件毛刺检测方法.pdf
本发明涉及一种基于图像处理的工件毛刺检测方法,采用LED发光半导体作为光源垂直照射在工件表面,利用CCD相机作为图像探测设备对工件边缘进行连续拍摄,最后用计算机采集相机拍摄的图像,然后对采集到的图像进行滤波、分割处理后,检测图像的边缘,并且对边缘进行融合后进行区域生长法处理,当生长的灰度值达到设定标准后就不需要扩展,表示边缘形成;之后再通过确定主轴来去除伪毛刺,并最后提取出毛刺边缘。通过最小外接矩形获取参考线。对比轮廓的长度,轮廓与参考线的角度差、平均距离、方差等位置关系,判别边缘线是否为毛刺。方法的复杂
一种基于图像处理的电缆护套厚度测量方法.pdf
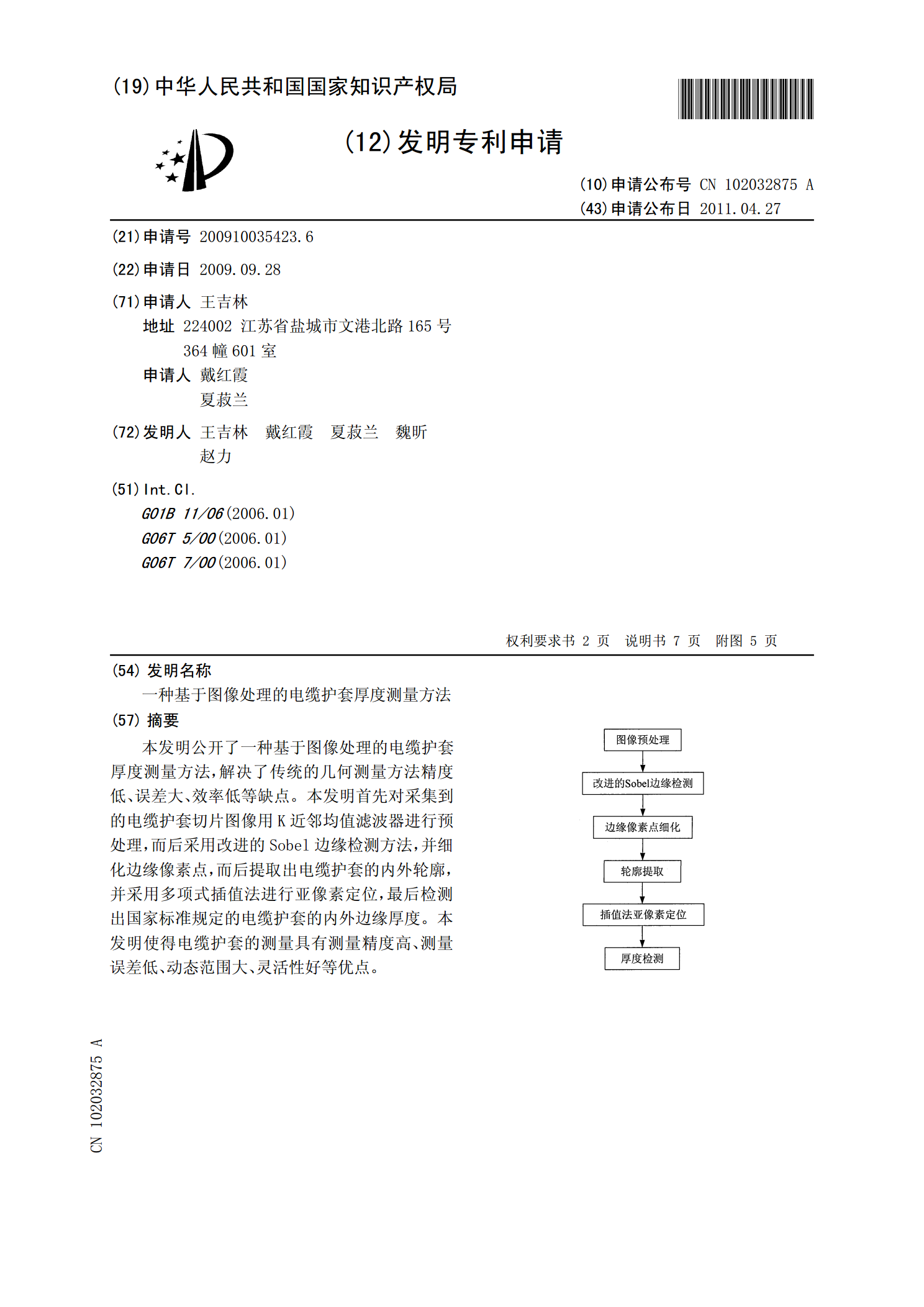
本发明公开了一种基于图像处理的电缆护套厚度测量方法,解决了传统的几何测量方法精度低、误差大、效率低等缺点。本发明首先对采集到的电缆护套切片图像用K近邻均值滤波器进行预处理,而后采用改进的Sobel边缘检测方法,并细化边缘像素点,而后提取出电缆护套的内外轮廓,并采用多项式插值法进行亚像素定位,最后检测出国家标准规定的电缆护套的内外边缘厚度。本发明使得电缆护套的测量具有测量精度高、测量误差低、动态范围大、灵活性好等优点。

一种基于图像处理的线圈匝数在线测量方法.pdf
本发明涉及线圈测量技术领域,涉及一种基于图像处理的线圈匝数在线测量方法。本发明通过对标准测量图像和待测线圈图像的边缘区域图像进行匹配,能够有效提高识别效率,只提取边缘区域图像,只保留相关性高的图像信息,可有效减少运算量,提高了检测的实时性;本发明能够实现线圈匝数测量,节省人力成本,提高工作效率。
一种基于云网络的图像快速处理系统.pdf
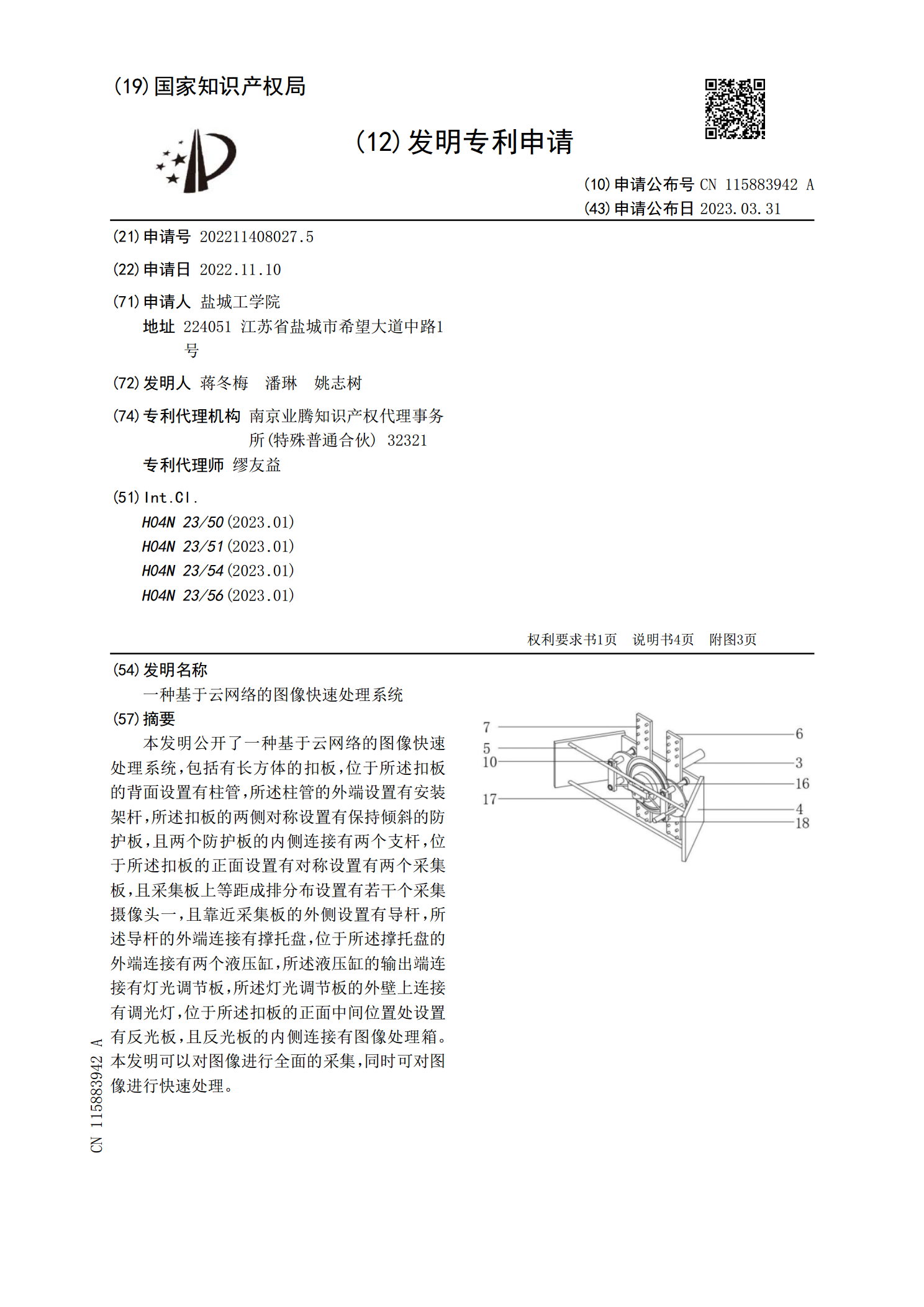
本发明公开了一种基于云网络的图像快速处理系统,包括有长方体的扣板,位于所述扣板的背面设置有柱管,所述柱管的外端设置有安装架杆,所述扣板的两侧对称设置有保持倾斜的防护板,且两个防护板的内侧连接有两个支杆,位于所述扣板的正面设置有对称设置有两个采集板,且采集板上等距成排分布设置有若干个采集摄像头一,且靠近采集板的外侧设置有导杆,所述导杆的外端连接有撑托盘,位于所述撑托盘的外端连接有两个液压缸,所述液压缸的输出端连接有灯光调节板,所述灯光调节板的外壁上连接有调光灯,位于所述扣板的正面中间位置处设置有反光板,且反