
凸曲率着陆轨迹燃耗优化方法.pdf

灵慧****89


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

凸曲率着陆轨迹燃耗优化方法.pdf
本发明公开的凸曲率着陆轨迹燃耗优化方法,属于深空探测技术领域。本发明将优化问题中的指标和约束均处理为符合二阶锥规划问题的形式,使用内点法求解燃耗优化轨迹,具有优化速度快且无局部最优解的优势;将凸优化方法引入凸曲率轨迹设计中,将凸曲率轨迹特性转化为状态矢量的角度约束,通过构造含曲率相关约束的燃耗优化二阶锥规划问题,使着陆轨迹保留凸曲率轨迹在避障和观测方面既有优势的同时,有效兼顾燃料经济性;将曲率约束和轨迹实时优化方法相结合,设计参数化的曲率调节机制,根据着陆区实际地形条件,调节曲率约束序列函数中的可调参数值

火箭动力下降着陆过程快速轨迹优化方法.pdf
火箭动力下降着陆过程快速轨迹优化方法。本发明公开的燃料最优动力下降着陆快速轨迹规划方法,属于火箭制导领域。本发明实现方法为:对动力下降飞行进行动力学建模并量纲归一化,建立三维无量纲动力学方程;把动力学方程的自变量从时间转化为高度;引入动力下降飞行所需的约束,建立燃料最优的动力下降着陆的最优控制问题;将原始最优控制问题中的非线性动力学方程处理成线性的动力学方程;将一部分的非线性性保留,转化为约束。将非凸约束进行凸化,建立一个凸的最优控制问题;将其在非均匀离散点用四阶Runge‑Kutta方法进行离散,建立二
一种微曲率半径天线激光加工扫描轨迹优化方法.pdf
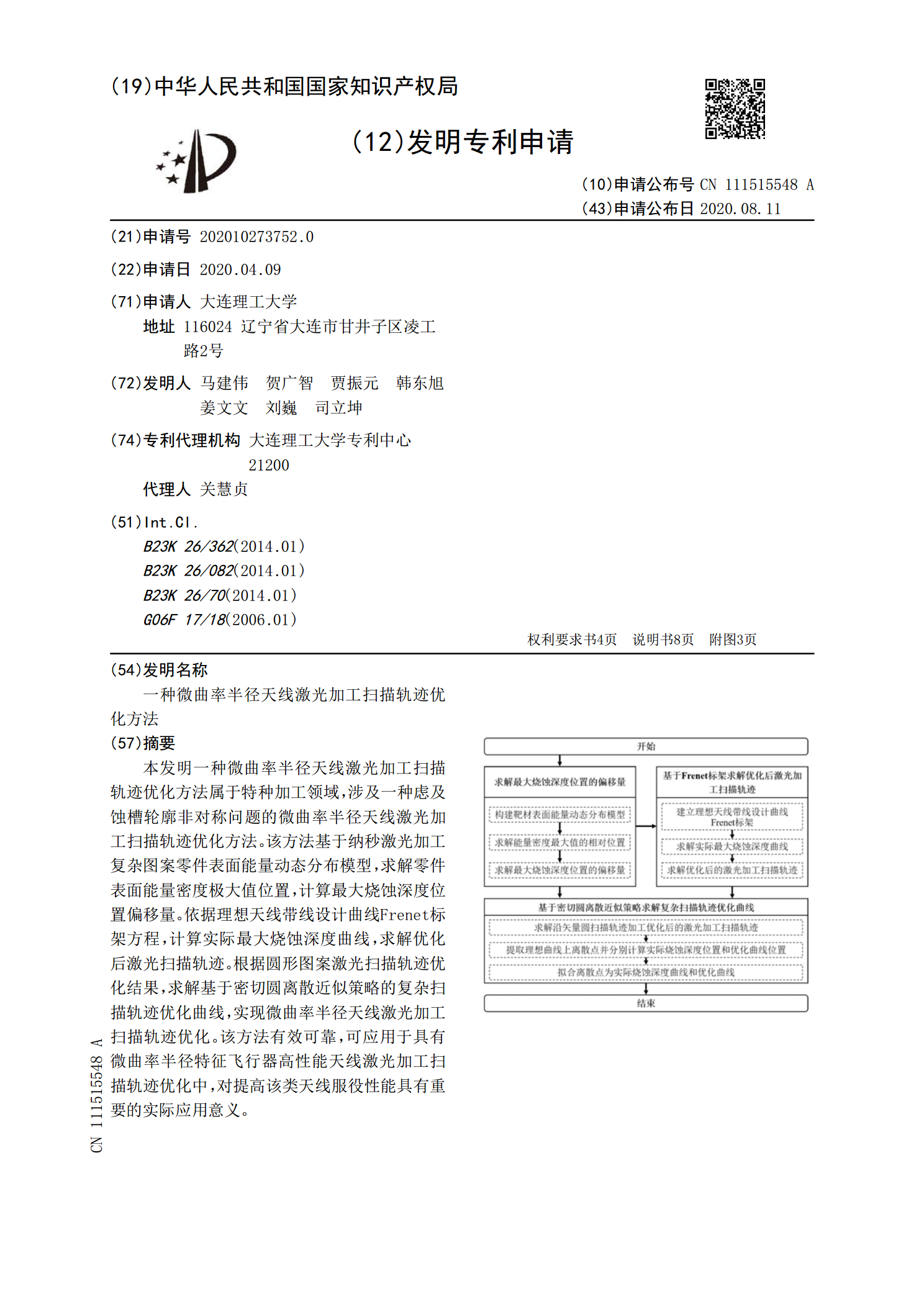
本发明一种微曲率半径天线激光加工扫描轨迹优化方法属于特种加工领域,涉及一种虑及蚀槽轮廓非对称问题的微曲率半径天线激光加工扫描轨迹优化方法。该方法基于纳秒激光加工复杂图案零件表面能量动态分布模型,求解零件表面能量密度极大值位置,计算最大烧蚀深度位置偏移量。依据理想天线带线设计曲线Frenet标架方程,计算实际最大烧蚀深度曲线,求解优化后激光扫描轨迹。根据圆形图案激光扫描轨迹优化结果,求解基于密切圆离散近似策略的复杂扫描轨迹优化曲线,实现微曲率半径天线激光加工扫描轨迹优化。该方法有效可靠,可应用于具有微曲率半
基于曲率极大值优化的刀具轨迹光顺方法和系统.pdf
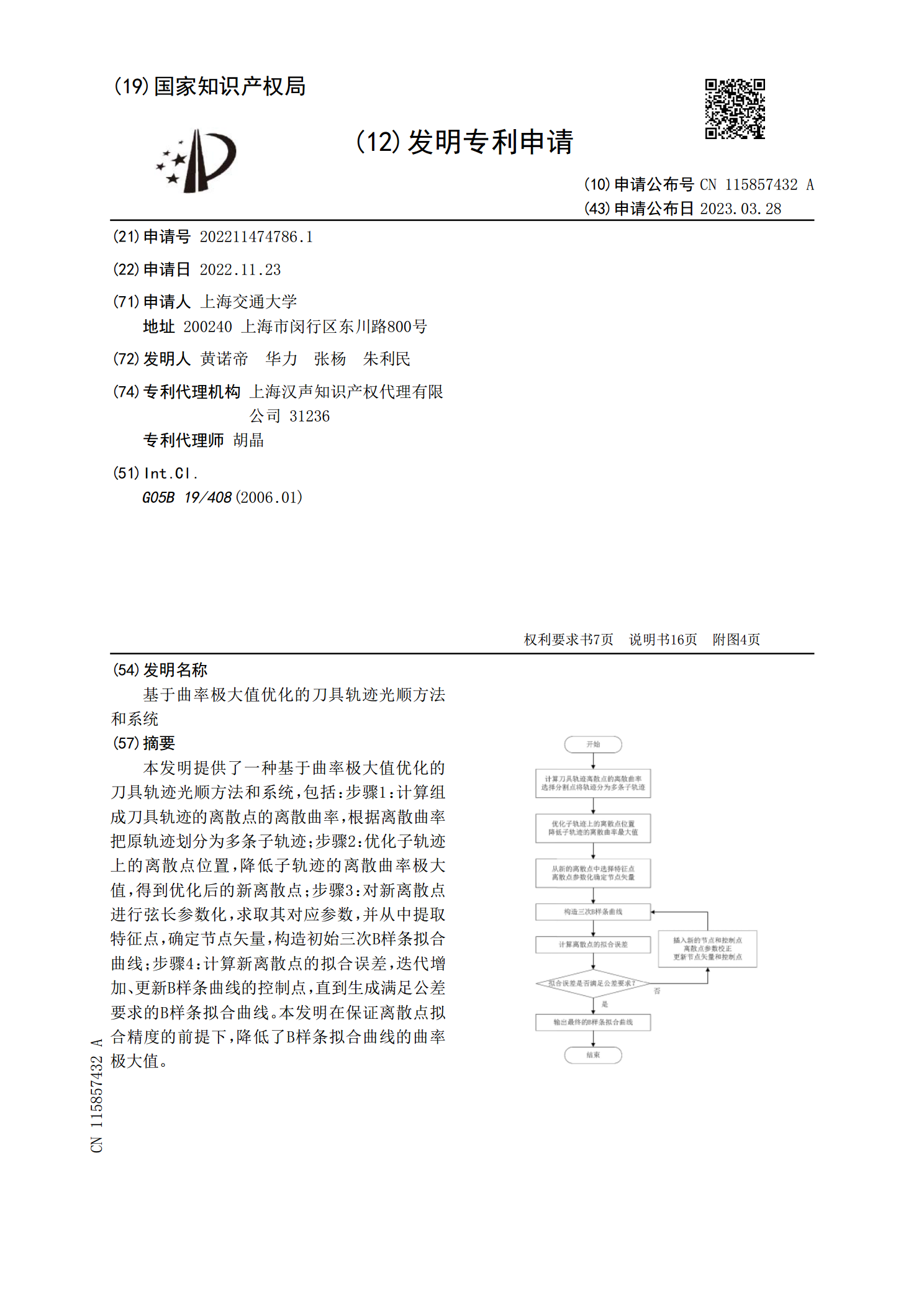
本发明提供了一种基于曲率极大值优化的刀具轨迹光顺方法和系统,包括:步骤1:计算组成刀具轨迹的离散点的离散曲率,根据离散曲率把原轨迹划分为多条子轨迹;步骤2:优化子轨迹上的离散点位置,降低子轨迹的离散曲率极大值,得到优化后的新离散点;步骤3:对新离散点进行弦长参数化,求取其对应参数,并从中提取特征点,确定节点矢量,构造初始三次B样条拟合曲线;步骤4:计算新离散点的拟合误差,迭代增加、更新B样条曲线的控制点,直到生成满足公差要求的B样条拟合曲线。本发明在保证离散点拟合精度的前提下,降低了B样条拟合曲线的曲率极
一种考虑曲率约束的自动驾驶车辆轨迹平滑优化方法.pdf
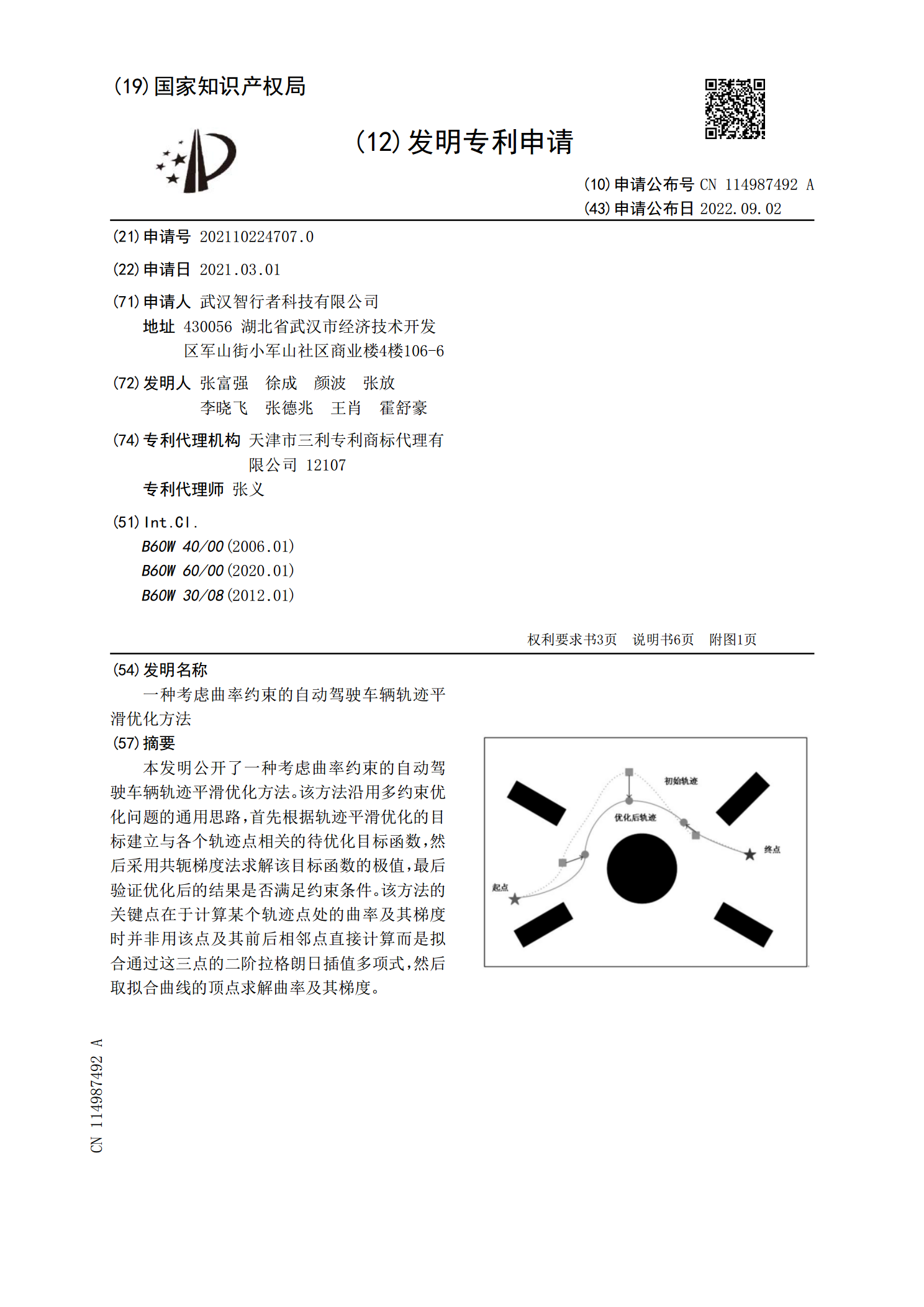
本发明公开了一种考虑曲率约束的自动驾驶车辆轨迹平滑优化方法。该方法沿用多约束优化问题的通用思路,首先根据轨迹平滑优化的目标建立与各个轨迹点相关的待优化目标函数,然后采用共轭梯度法求解该目标函数的极值,最后验证优化后的结果是否满足约束条件。该方法的关键点在于计算某个轨迹点处的曲率及其梯度时并非用该点及其前后相邻点直接计算而是拟合通过这三点的二阶拉格朗日插值多项式,然后取拟合曲线的顶点求解曲率及其梯度。