
部分人工介入的多波束测深数据异常值自动清理方法.pdf

论文****轩吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

部分人工介入的多波束测深数据异常值自动清理方法.pdf
本发明提供部分人工介入的多波束测深数据异常值自动清理方法,属于多波束测深数据处理研究领域。部分人工介入的多波束测深数据异常值自动清理方法,该方法主要步骤包含“基于密度聚类算法的水深数据分类”和“部分人工介入的存疑数据有效性判定”两部分。通过聚类算法将原始数据分为可信数据、无效数据和存疑数据三类,保留可信数据,剔除无效数据,并将存疑数据提交人工判定其有效性,最终将其归类为可信数据或者存疑数据。

多波束测深异常数据探测方法.docx
多波束测深异常数据探测方法标题:多波束测深异常数据探测方法引言:多波束测深是一种常用的海洋测量手段,它通过同时发射多个声波束,接收并记录反射回来的声波信号,以实现对海底地形的三维测量。然而,在实际的测深过程中,由于水声信号与海底地形的复杂交互作用,会产生一些异常数据,例如测量误差、多次反射等。因此,研究多波束测深异常数据探测方法对于提高测深数据的准确性和可靠性具有重要意义。一、多波束测深异常数据的产生原因1.测量误差:多波束测深仪器本身可能存在一定的测量误差,例如系统响应不均匀、回波能量衰减等。2.多次反

矢量曲线简化方法在多波束测深数据中的应用.doc
龙源期刊网http://www.qikan.com.cn矢量曲线简化方法在多波束测深数据中的应用作者:秦茂芬李珂来源:《科技创新导报》2011年第15期摘要:本文针对多波束测深数据的冗余性,采用基于矢量曲线的道格拉斯-普克法及垂距限值法进行简化。实例表明,垂距限值法具有更好的简化性能,适用于多波束测深数据的简化。关键词:数据简化矢量曲线多波束测深中图分类号:TB565文献标识码:A文章编号:1674-098X(2011)05(c)-0079-021简介多波束测深仪具有几百到上千个波束,一次扇区(ping)
一种多波束探头校正方法和多波束测深数据校正方法.pdf
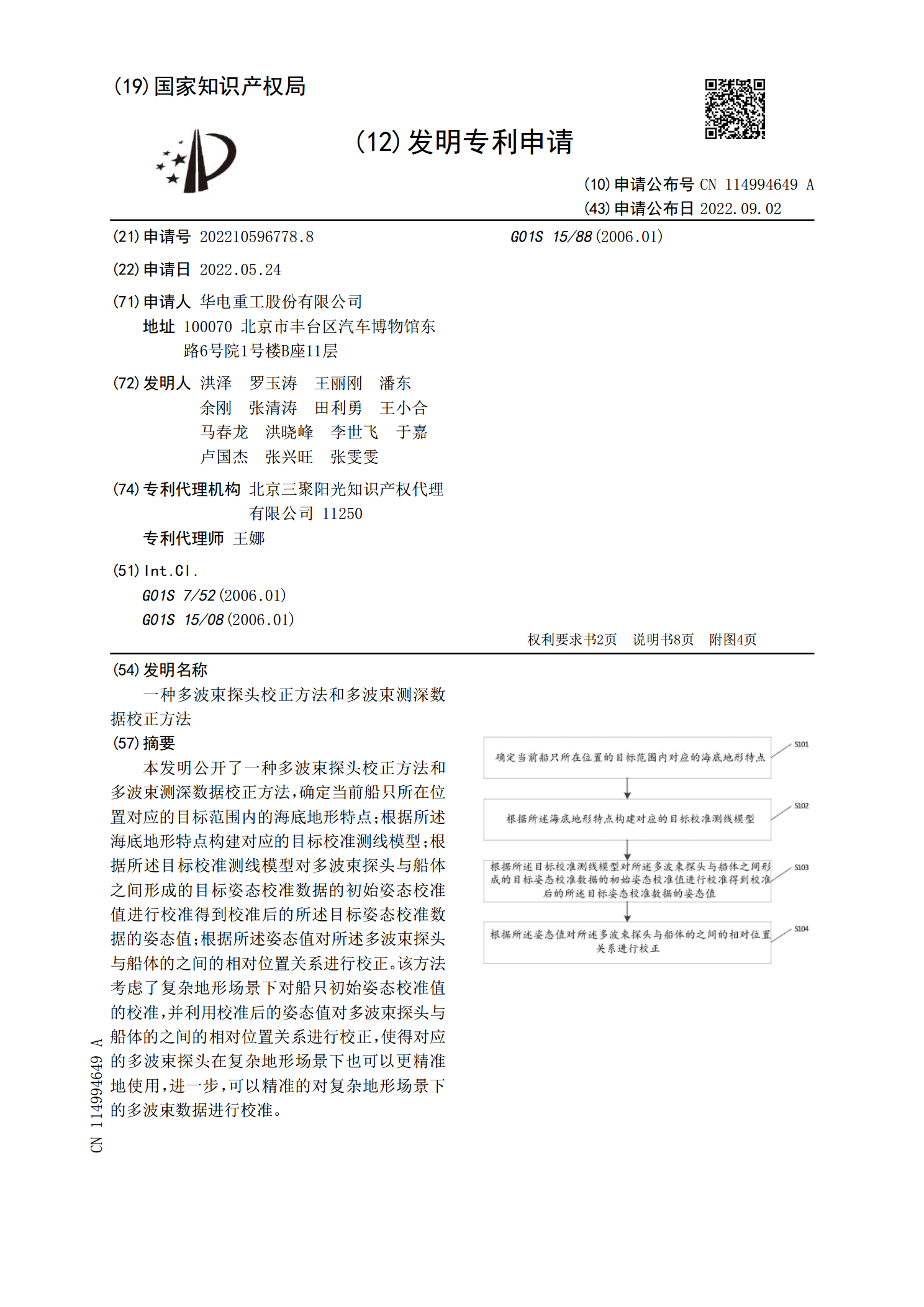
本发明公开了一种多波束探头校正方法和多波束测深数据校正方法,确定当前船只所在位置对应的目标范围内的海底地形特点;根据所述海底地形特点构建对应的目标校准测线模型;根据所述目标校准测线模型对多波束探头与船体之间形成的目标姿态校准数据的初始姿态校准值进行校准得到校准后的所述目标姿态校准数据的姿态值;根据所述姿态值对所述多波束探头与船体的之间的相对位置关系进行校正。该方法考虑了复杂地形场景下对船只初始姿态校准值的校准,并利用校准后的姿态值对多波束探头与船体的之间的相对位置关系进行校正,使得对应的多波束探头在复杂地

一种多波束测深数据化简方法及装置.pdf
本发明涉及一种多波束测深数据化简方法及装置,属于海底地形综合技术领域。本发明采用稳定性更高的格网分割法实现测深数据点集的分组,避免了出现因聚类结果不正确而导致的点化简效果较差的情况,提高了化简效果;同时采用复杂度越高的子区域化简后保留点的个数越多的化简策略进行化简,保证了化简后数据表达地形的准确性,使得化简结果不仅满足航海图制图应用,还可用于构建海底地形模型和进行地形分析。