
一种端到端的道路裂缝检测系统.pdf

婀娜****aj


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种端到端的道路裂缝检测系统.pdf
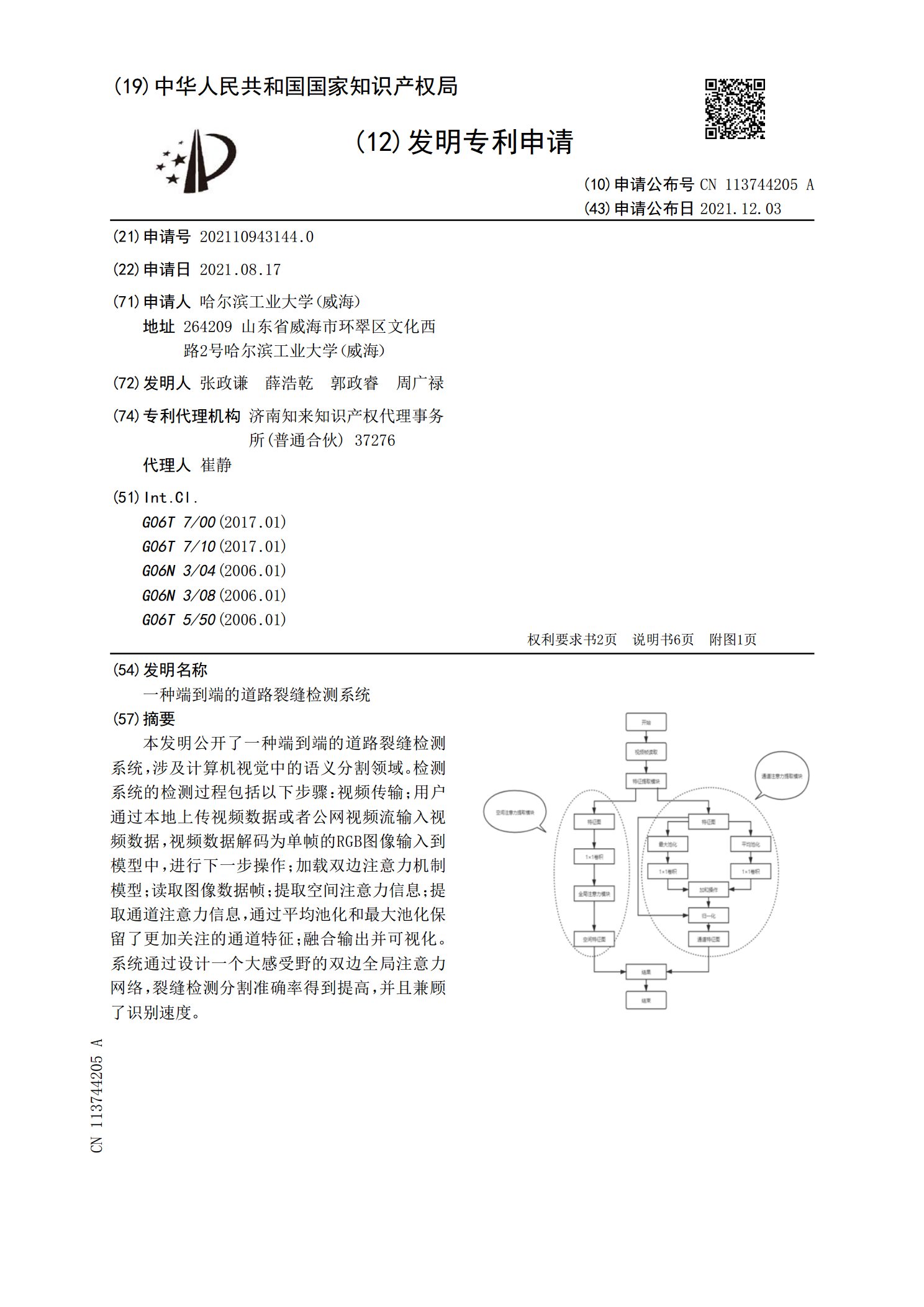
本发明公开了一种端到端的道路裂缝检测系统,涉及计算机视觉中的语义分割领域。检测系统的检测过程包括以下步骤:视频传输;用户通过本地上传视频数据或者公网视频流输入视频数据,视频数据解码为单帧的RGB图像输入到模型中,进行下一步操作;加载双边注意力机制模型;读取图像数据帧;提取空间注意力信息;提取通道注意力信息,通过平均池化和最大池化保留了更加关注的通道特征;融合输出并可视化。系统通过设计一个大感受野的双边全局注意力网络,裂缝检测分割准确率得到提高,并且兼顾了识别速度。
一种基于PCA的端到端路面裂缝检测识别方法.pdf
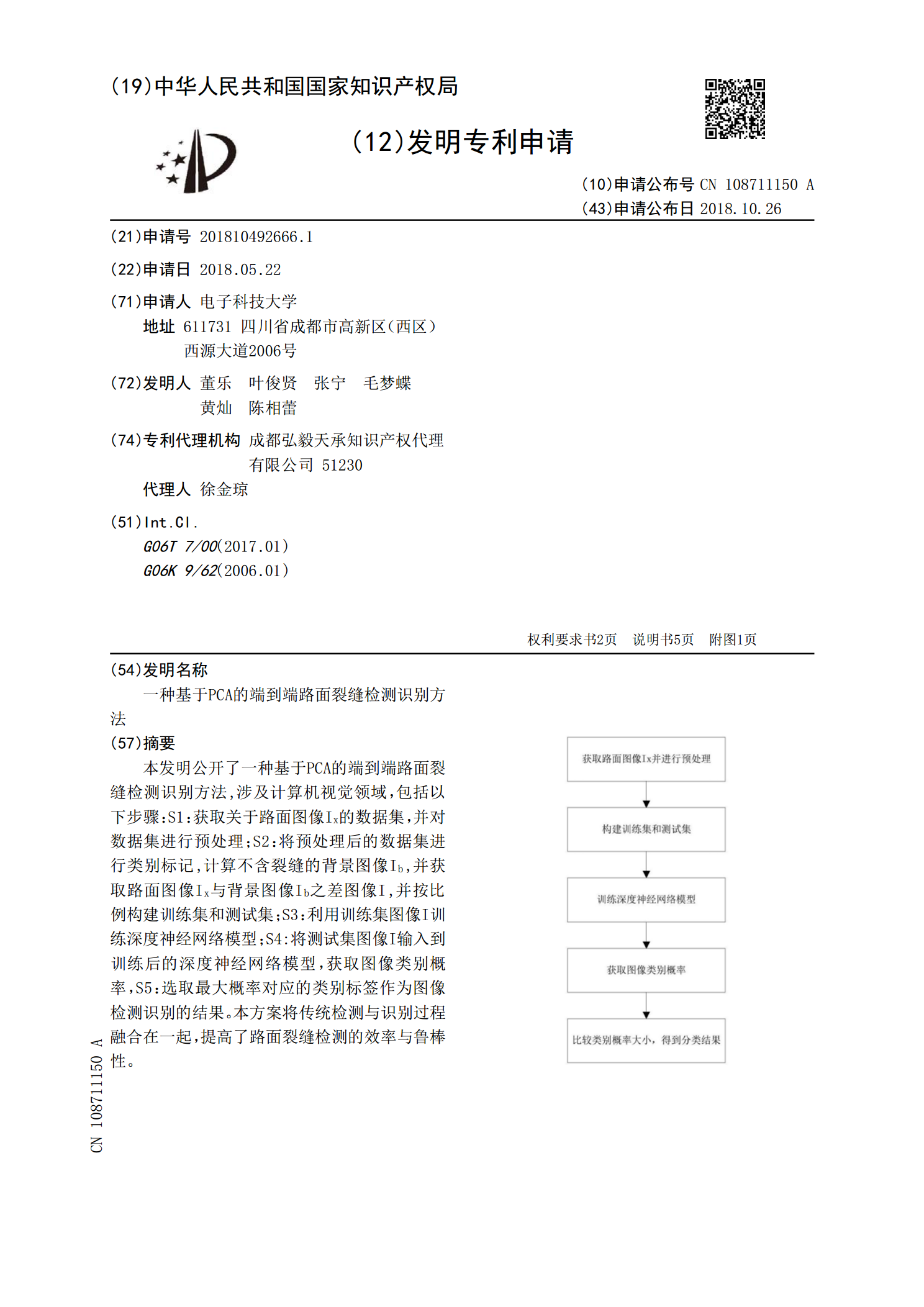
本发明公开了一种基于PCA的端到端路面裂缝检测识别方法,涉及计算机视觉领域,包括以下步骤:S1:获取关于路面图像I<base:Sub>x</base:Sub>的数据集,并对数据集进行预处理;S2:将预处理后的数据集进行类别标记,计算不含裂缝的背景图像I<base:Sub>b</base:Sub>,并获取路面图像I<base:Sub>x</base:Sub>与背景图像I<base:Sub>b</base:Sub>之差图像I,并按比例构建训练集和测试集;S3:利用训练集图像I训练深度神经网络模型;S4:将测试
一种端到端光学字符检测识别方法与系统.pdf
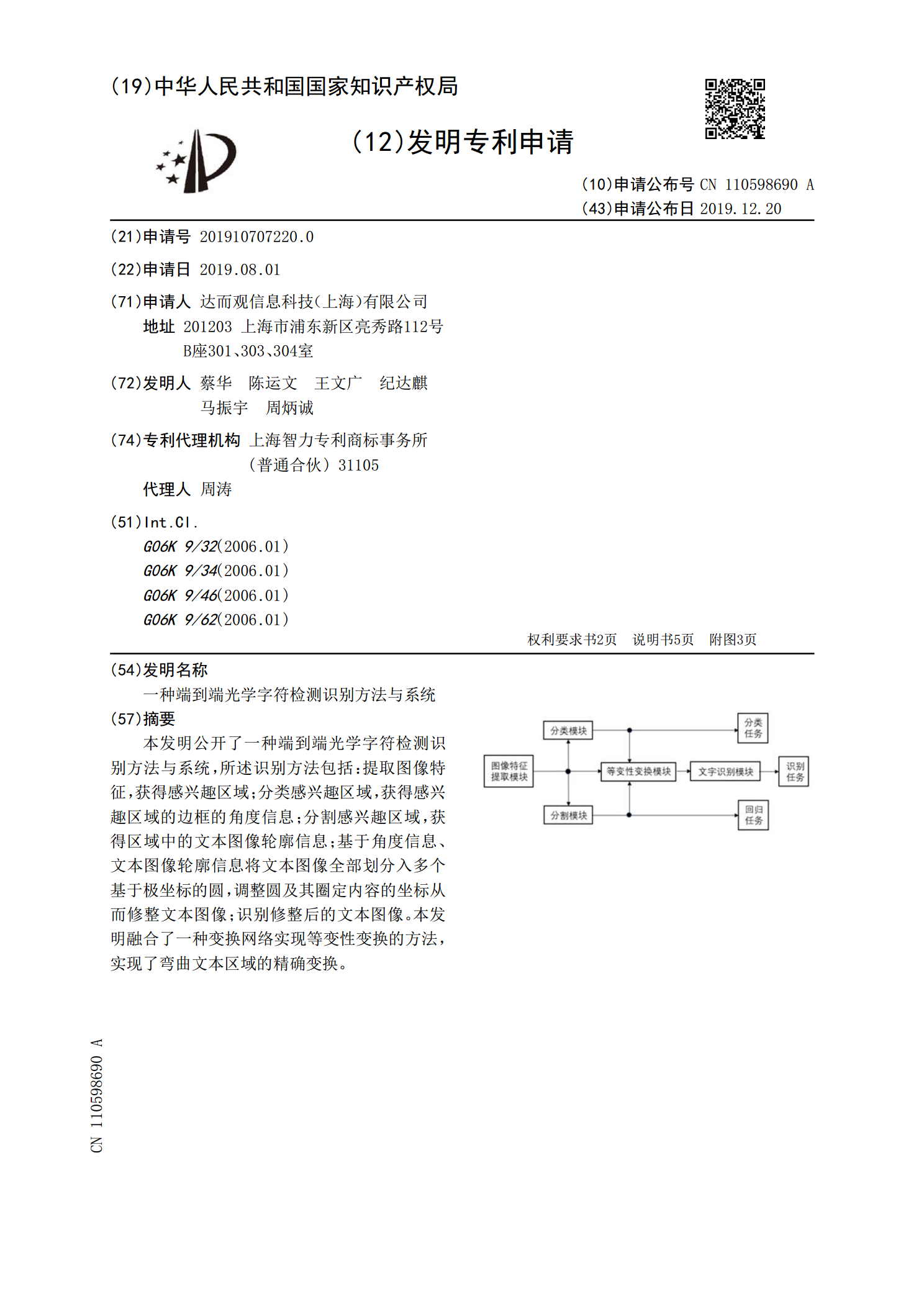
本发明公开了一种端到端光学字符检测识别方法与系统,所述识别方法包括:提取图像特征,获得感兴趣区域;分类感兴趣区域,获得感兴趣区域的边框的角度信息;分割感兴趣区域,获得区域中的文本图像轮廓信息;基于角度信息、文本图像轮廓信息将文本图像全部划分入多个基于极坐标的圆,调整圆及其圈定内容的坐标从而修整文本图像;识别修整后的文本图像。本发明融合了一种变换网络实现等变性变换的方法,实现了弯曲文本区域的精确变换。
一种端到端的对话方法和系统.pdf
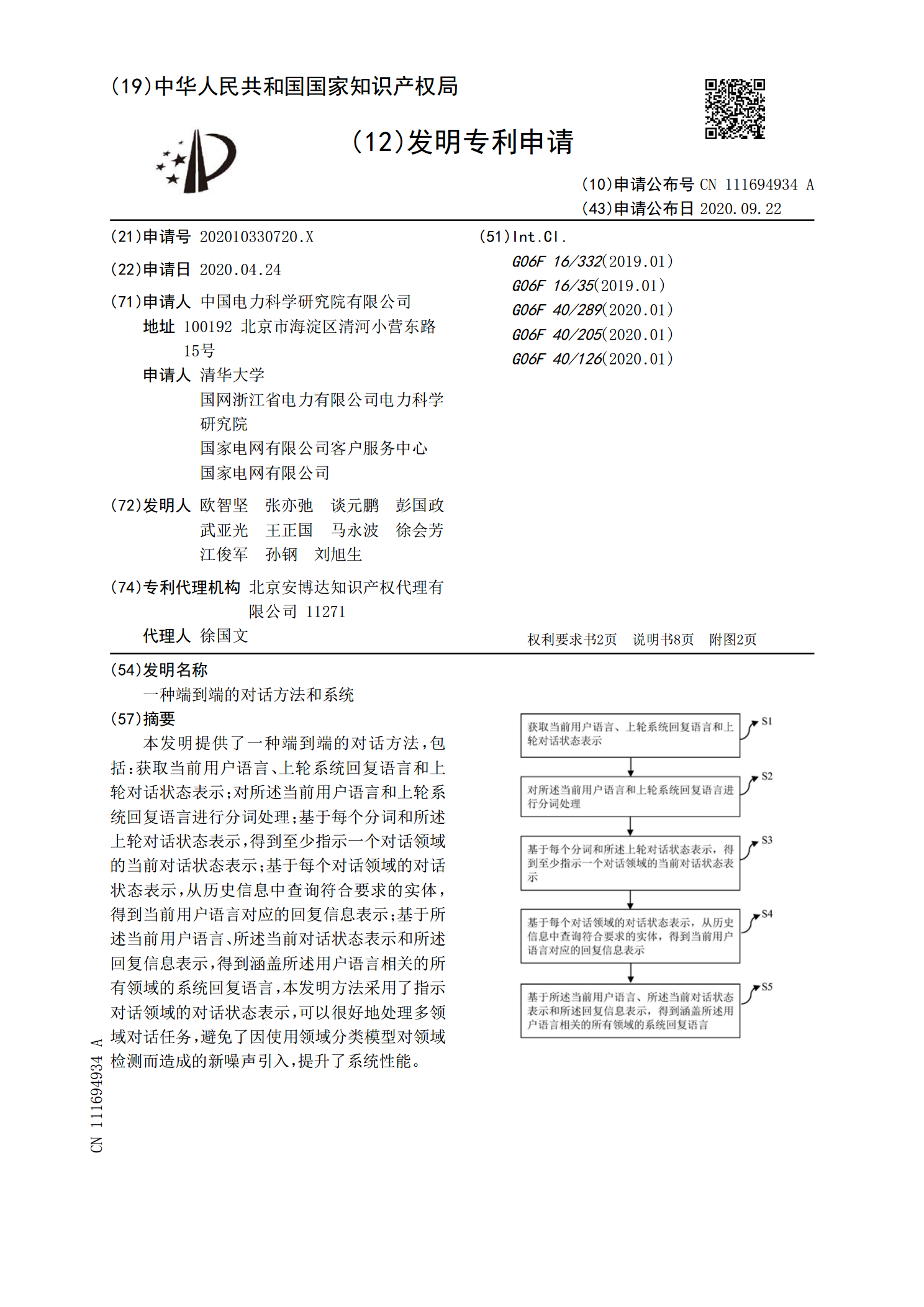
本发明提供了一种端到端的对话方法,包括:获取当前用户语言、上轮系统回复语言和上轮对话状态表示;对所述当前用户语言和上轮系统回复语言进行分词处理;基于每个分词和所述上轮对话状态表示,得到至少指示一个对话领域的当前对话状态表示;基于每个对话领域的对话状态表示,从历史信息中查询符合要求的实体,得到当前用户语言对应的回复信息表示;基于所述当前用户语言、所述当前对话状态表示和所述回复信息表示,得到涵盖所述用户语言相关的所有领域的系统回复语言,本发明方法采用了指示对话领域的对话状态表示,可以很好地处理多领域对话任务,
一种端到端的车辆行为检测方法、系统、设备及存储介质.pdf
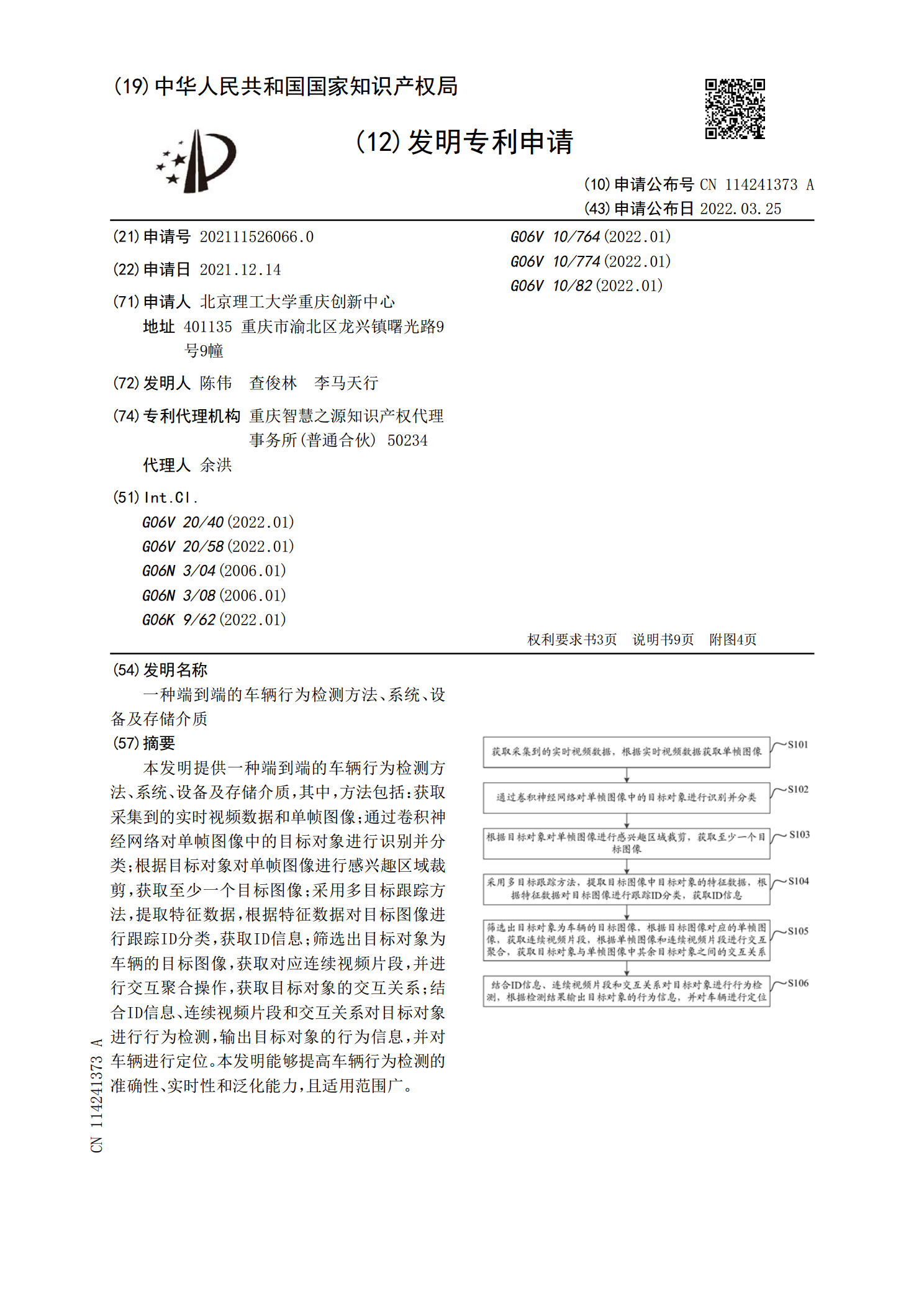
本发明提供一种端到端的车辆行为检测方法、系统、设备及存储介质,其中,方法包括:获取采集到的实时视频数据和单帧图像;通过卷积神经网络对单帧图像中的目标对象进行识别并分类;根据目标对象对单帧图像进行感兴趣区域裁剪,获取至少一个目标图像;采用多目标跟踪方法,提取特征数据,根据特征数据对目标图像进行跟踪ID分类,获取ID信息;筛选出目标对象为车辆的目标图像,获取对应连续视频片段,并进行交互聚合操作,获取目标对象的交互关系;结合ID信息、连续视频片段和交互关系对目标对象进行行为检测,输出目标对象的行为信息,并对车辆