
一种柔性波动鳍仿生潜器.pdf

小琛****82


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种柔性波动鳍仿生潜器.pdf
本发明属于两栖推进器技术领域,具体涉及一种柔性波动鳍仿生潜器。本发明采用仿生波动鳍的结构,仿生来源自鳐鱼、深海带鱼的波动鳍相结合,材料采用高弹硅胶,具有较高的延展性,该推进系统具有操纵性优异、水动力噪声低、易于仿生改造、地形通过性强、可在限制航道工作等海洋作业特点。本发明的机械结构采用舵机‑连杆‑仿生波动鳍连接方式,舵机侧面固定在仿生推进器主体部分预留的厚度结构上,通过多个舵机摆动幅度和转向驱动可控制波动鳍摆动,实现转向、加速、上浮、下沉及制动等功能,更能适应复杂的水底环境。

基于海扁虫柔性侧鳍波动的仿生鱼设计.pptx
汇报人:目录PARTONE海扁虫的生物特性仿生鱼设计的意义仿生鱼设计的应用前景PARTTWO海扁虫的生物力学特性侧鳍波动的工作原理侧鳍波动的仿生实现方式PARTTHREE仿生鱼的整体结构设计仿生鱼的柔性侧鳍设计仿生鱼的推进系统设计仿生鱼的控制系统设计PARTFOUR实验设备与实验环境实验过程与实验结果实验结果的分析与讨论PARTFIVE仿生鱼在海洋探测领域的应用前景仿生鱼在海洋资源开发领域的应用前景仿生鱼在其他领域的应用前景仿生鱼技术的未来发展方向THANKYOU

一种仿生波动长鳍水下推进器.pdf
本发明涉及一种仿生波动长鳍水下推进器包括:上下半筒、密封圈、螺丝孔、气门嘴芯、防水插头、第一锥齿轮、多个鳍条、长鳍、控制电路板、第一、第二舵机、压条、第一轴承座、配重块、丝杆、螺丝孔、电池组件,以及多路第一舵机动力输出结构由一长轴、鳍条座、第二轴承座、轴套、聚四氟乙烯圈、格来圈、滚珠轴承、第二锥齿轮组成;上半筒、下半筒和密封圈连接并压紧构成一个密封腔体,长鳍设置于圆筒形腔体下部,长鳍上具有多根鳍条,所有鳍条等间距分布在长鳍的鳍面上。每根鳍条通过第一锥齿轮、第二锥齿轮连接一个第一舵机单独驱动,长鳍鳍面是乳胶
柔性仿生波动鳍推进理论与实验研究共3篇.pdf
柔性仿生波动鳍推进理论与实验研究共3篇柔性仿生波动鳍推进理论与实验研究1柔性仿生波动鳍推进理论与实验研究随着人工智能、机器人技术、智能制造等领域的不断发展,受到自然的启发,仿生学作为一门新兴学科逐渐崭露头角,在各个领域中得到广泛应用。柔性仿生波动鳍作为仿生学中的一个研究方向,在水下机器人、水下探测和环境监测等领域中有着广泛的应用前景,近年来受到了越来越多的关注。作为一项新兴技术,柔性仿生波动鳍推进还面临着许多问题和挑战。本文旨在探讨柔性仿生波动鳍推进理论及其实验研究,剖析当前研究的现状和未来的发展趋势。一
一种柔性管状波动的仿生推进器.pdf
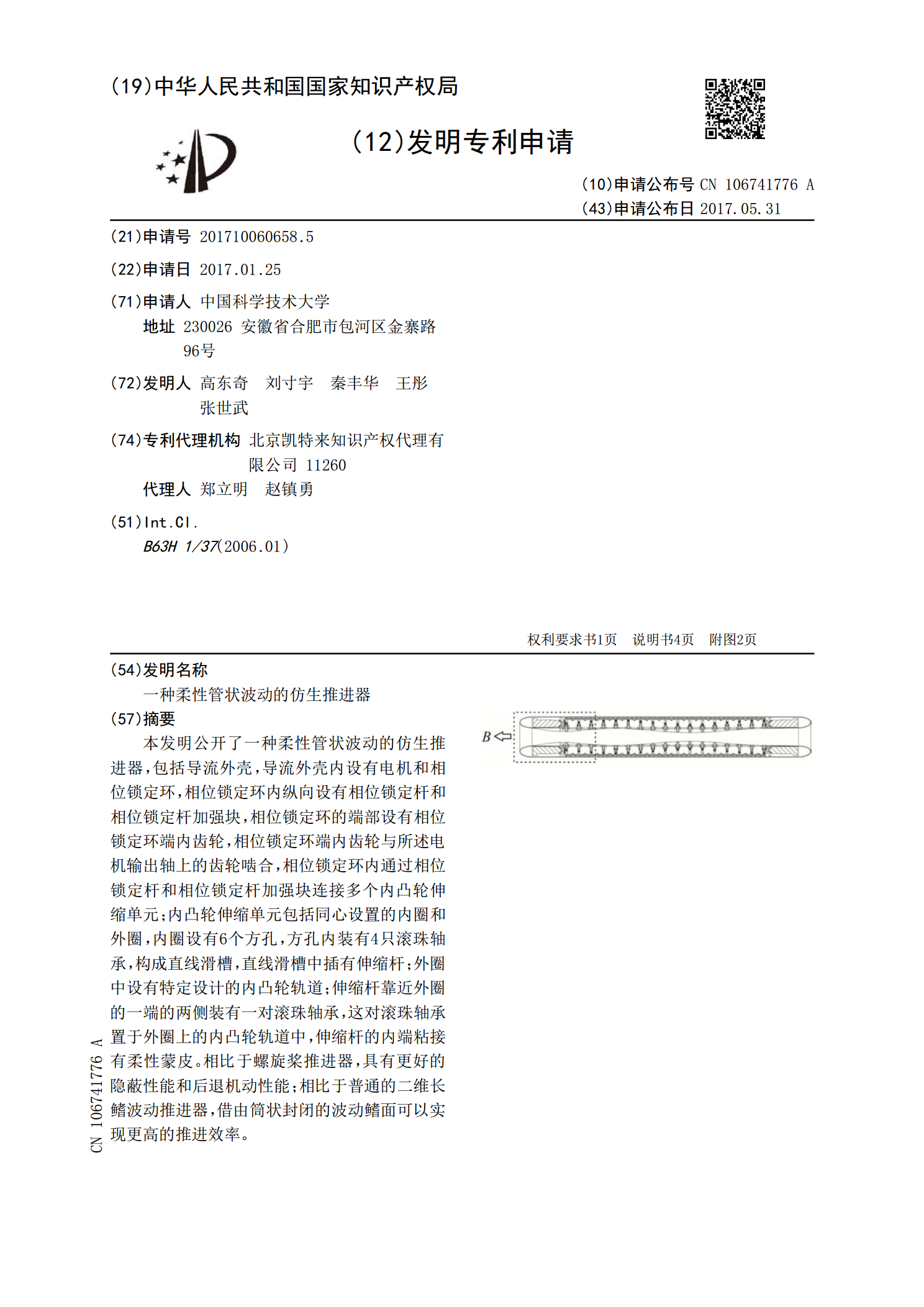
本发明公开了一种柔性管状波动的仿生推进器,包括导流外壳,导流外壳内设有电机和相位锁定环,相位锁定环内纵向设有相位锁定杆和相位锁定杆加强块,相位锁定环的端部设有相位锁定环端内齿轮,相位锁定环端内齿轮与所述电机输出轴上的齿轮啮合,相位锁定环内通过相位锁定杆和相位锁定杆加强块连接多个内凸轮伸缩单元;内凸轮伸缩单元包括同心设置的内圈和外圈,内圈设有6个方孔,方孔内装有4只滚珠轴承,构成直线滑槽,直线滑槽中插有伸缩杆;外圈中设有特定设计的内凸轮轨道;伸缩杆靠近外圈的一端的两侧装有一对滚珠轴承,这对滚珠轴承置于外圈上