
堆料控制方法及堆料系统.pdf

一只****呀淑

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

堆料控制方法及堆料系统.pdf
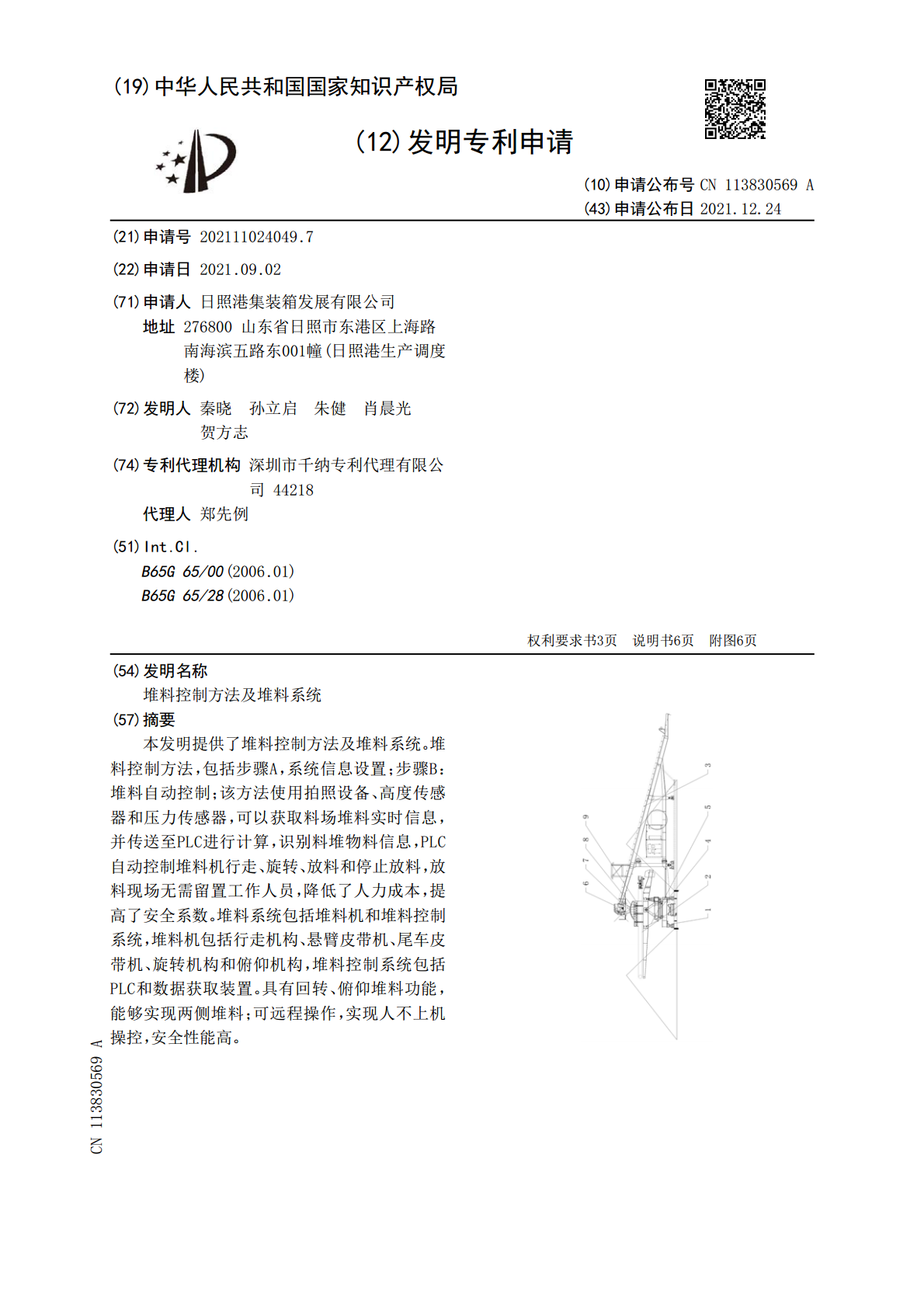
本发明提供了堆料控制方法及堆料系统。堆料控制方法,包括步骤A,系统信息设置;步骤B:堆料自动控制;该方法使用拍照设备、高度传感器和压力传感器,可以获取料场堆料实时信息,并传送至PLC进行计算,识别料堆物料信息,PLC自动控制堆料机行走、旋转、放料和停止放料,放料现场无需留置工作人员,降低了人力成本,提高了安全系数。堆料系统包括堆料机和堆料控制系统,堆料机包括行走机构、悬臂皮带机、尾车皮带机、旋转机构和俯仰机构,堆料控制系统包括PLC和数据获取装置。具有回转、俯仰堆料功能,能够实现两侧堆料;可远程操作,实现
堆料检测控制方法及系统.pdf
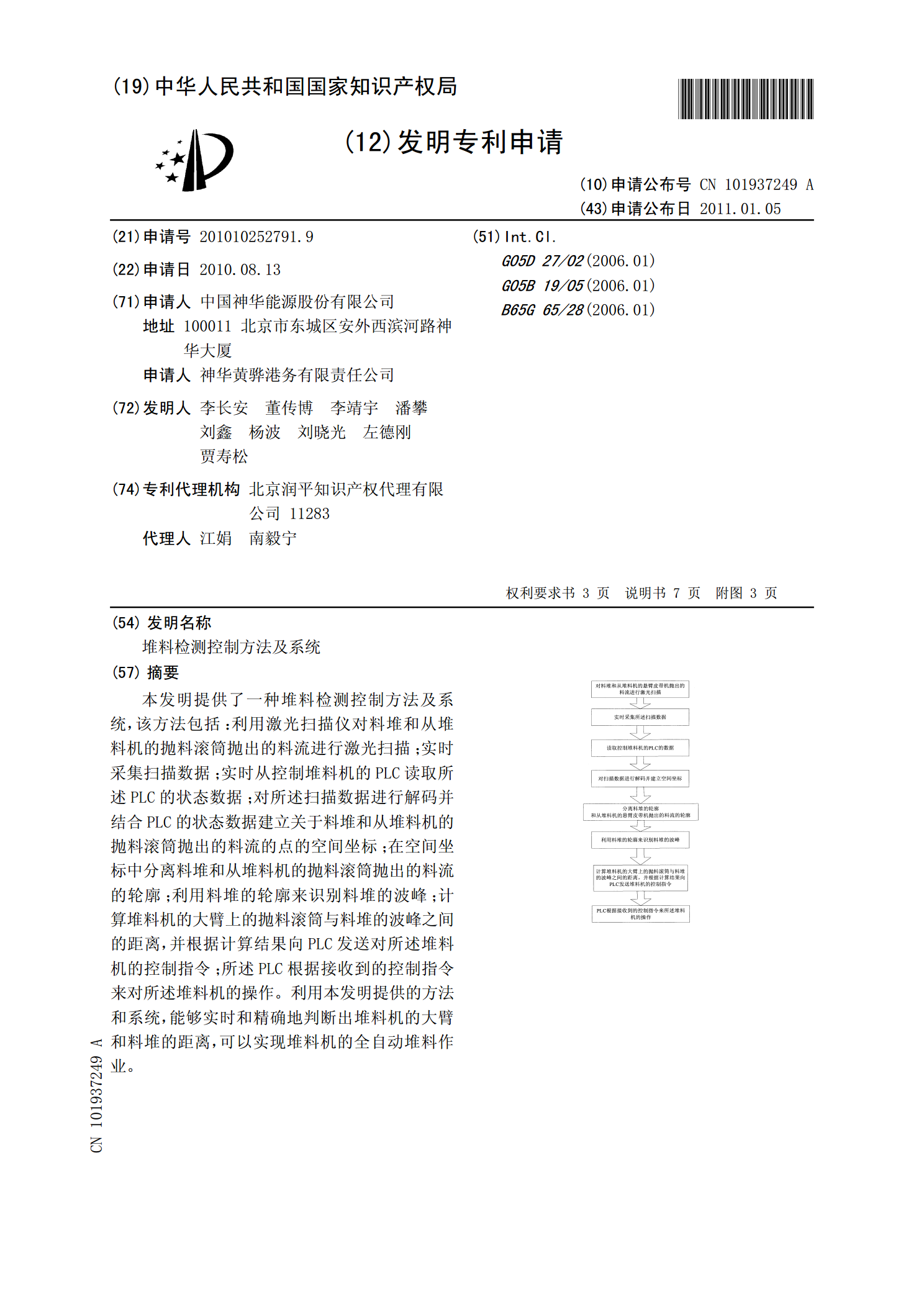
本发明提供了一种堆料检测控制方法及系统,该方法包括:利用激光扫描仪对料堆和从堆料机的抛料滚筒抛出的料流进行激光扫描;实时采集扫描数据;实时从控制堆料机的PLC读取所述PLC的状态数据;对所述扫描数据进行解码并结合PLC的状态数据建立关于料堆和从堆料机的抛料滚筒抛出的料流的点的空间坐标;在空间坐标中分离料堆和从堆料机的抛料滚筒抛出的料流的轮廓;利用料堆的轮廓来识别料堆的波峰;计算堆料机的大臂上的抛料滚筒与料堆的波峰之间的距离,并根据计算结果向PLC发送对所述堆料机的控制指令;所述PLC根据接收到的控制指令来
基于堆料机横行运动的堆料方法.pdf
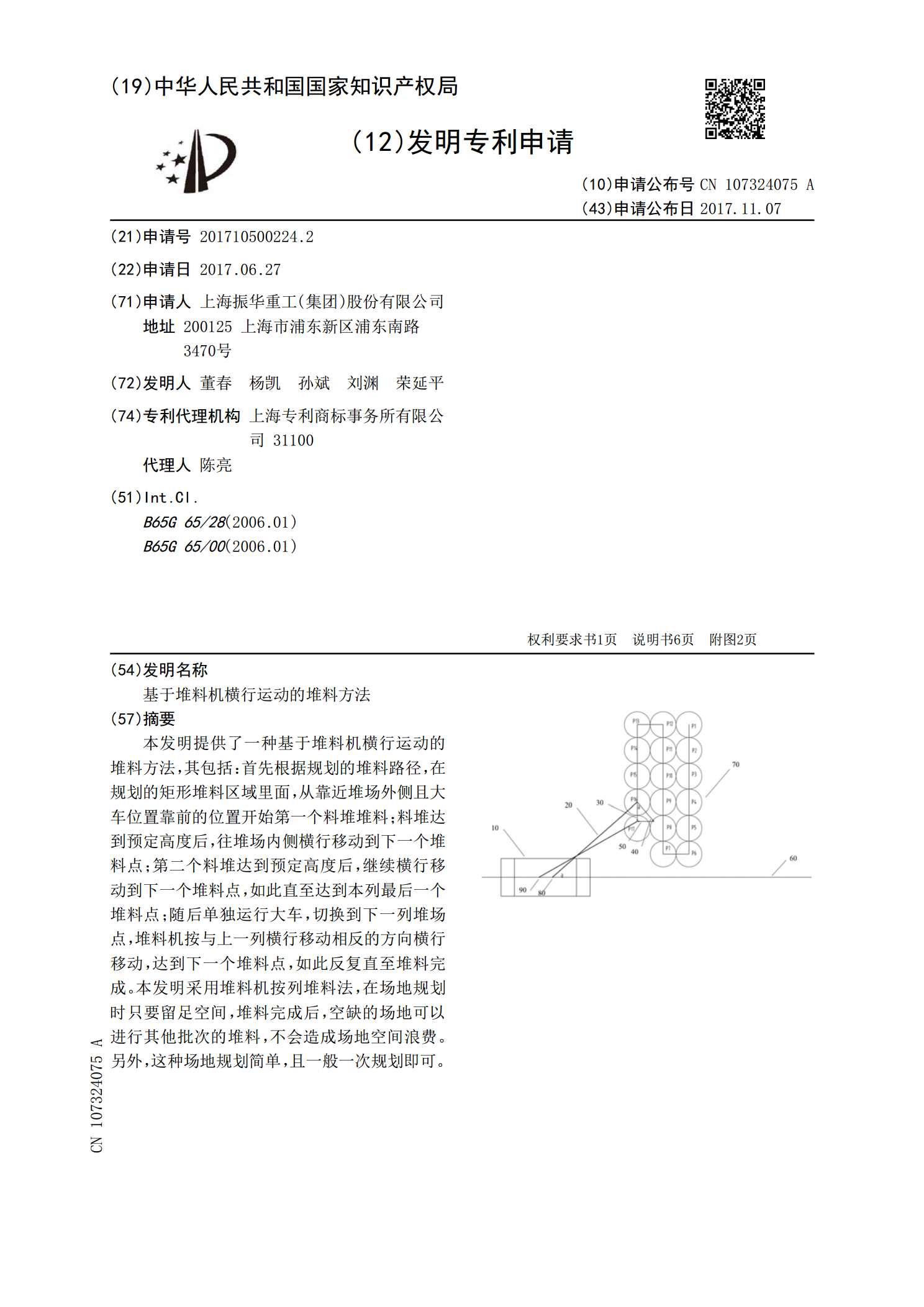
本发明提供了一种基于堆料机横行运动的堆料方法,其包括:首先根据规划的堆料路径,在规划的矩形堆料区域里面,从靠近堆场外侧且大车位置靠前的位置开始第一个料堆堆料;料堆达到预定高度后,往堆场内侧横行移动到下一个堆料点;第二个料堆达到预定高度后,继续横行移动到下一个堆料点,如此直至达到本列最后一个堆料点;随后单独运行大车,切换到下一列堆场点,堆料机按与上一列横行移动相反的方向横行移动,达到下一个堆料点,如此反复直至堆料完成。本发明采用堆料机按列堆料法,在场地规划时只要留足空间,堆料完成后,空缺的场地可以进行其他批
堆料机压带轮、堆料机压带装置和堆料机.pdf
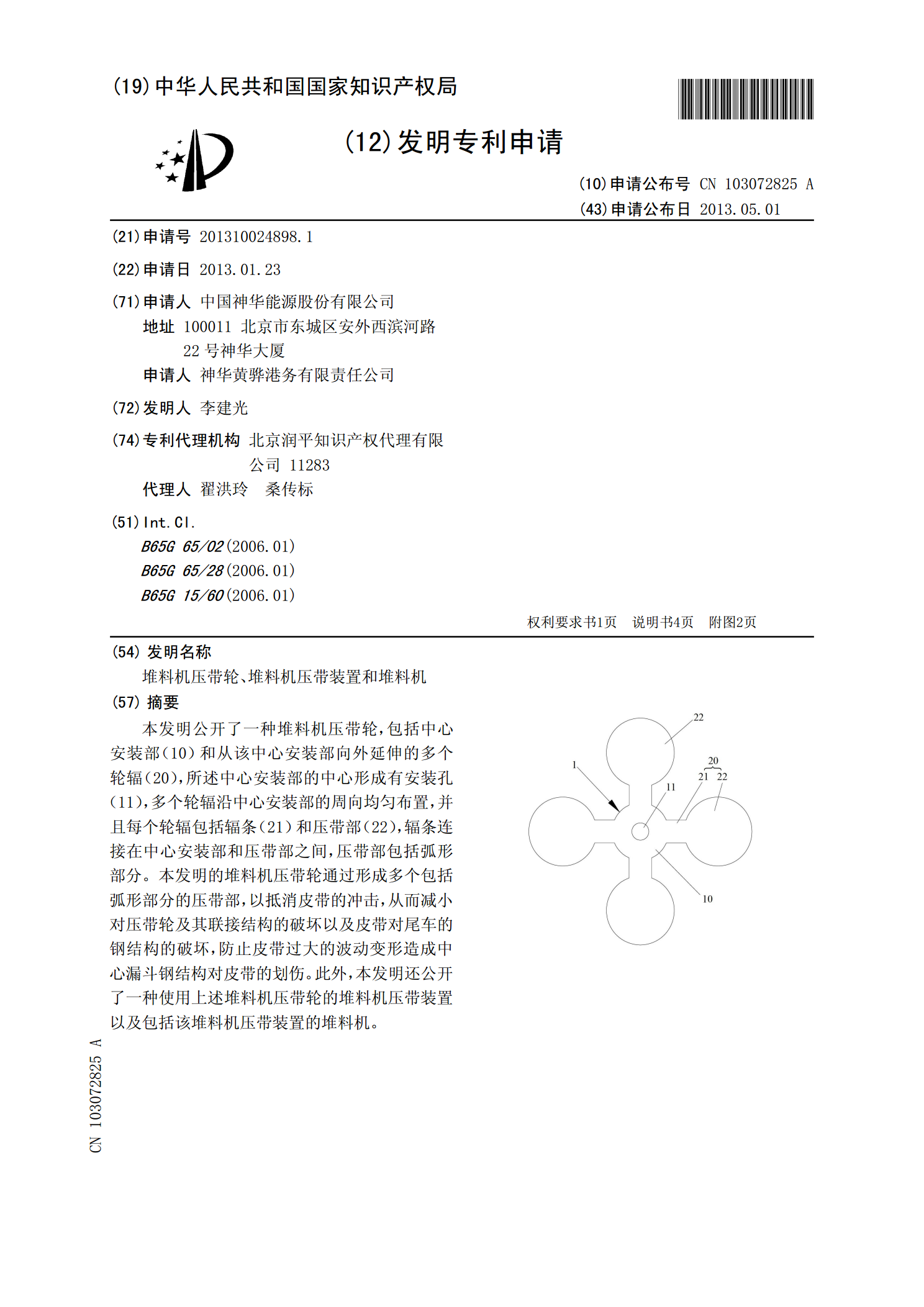
本发明公开了一种堆料机压带轮,包括中心安装部(10)和从该中心安装部向外延伸的多个轮辐(20),所述中心安装部的中心形成有安装孔(11),多个轮辐沿中心安装部的周向均匀布置,并且每个轮辐包括辐条(21)和压带部(22),辐条连接在中心安装部和压带部之间,压带部包括弧形部分。本发明的堆料机压带轮通过形成多个包括弧形部分的压带部,以抵消皮带的冲击,从而减小对压带轮及其联接结构的破坏以及皮带对尾车的钢结构的破坏,防止皮带过大的波动变形造成中心漏斗钢结构对皮带的划伤。此外,本发明还公开了一种使用上述堆料机压带轮的

散料堆场料堆建模方法研究.docx
散料堆场料堆建模方法研究摘要散料堆场是工业生产和物流运输中广泛使用的设施,其建模方法对于提高对堆场的管理效率、降低人力成本和资源浪费具有至关重要的意义。本文主要研究散料堆场料堆建模方法,描述了散料堆场料堆的结构特点、堆积规律及其影响因素,并介绍了散料堆场料堆建模的数学模型和仿真方法,以期为散料堆场管理提供更多的理论支持和实践经验。关键词:散料堆场;料堆建模;数学模型;仿真方法;管理效率一、引言散料是指无规则的颗粒状物料,如煤、矿石、粉状物料等,散料堆场是存储这种材料的重要设施,广泛应用于矿山、港口、火力发