
堆料检测控制方法及系统.pdf

猫巷****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

堆料控制方法及堆料系统.pdf
本发明提供了堆料控制方法及堆料系统。堆料控制方法,包括步骤A,系统信息设置;步骤B:堆料自动控制;该方法使用拍照设备、高度传感器和压力传感器,可以获取料场堆料实时信息,并传送至PLC进行计算,识别料堆物料信息,PLC自动控制堆料机行走、旋转、放料和停止放料,放料现场无需留置工作人员,降低了人力成本,提高了安全系数。堆料系统包括堆料机和堆料控制系统,堆料机包括行走机构、悬臂皮带机、尾车皮带机、旋转机构和俯仰机构,堆料控制系统包括PLC和数据获取装置。具有回转、俯仰堆料功能,能够实现两侧堆料;可远程操作,实现
堆料检测控制方法及系统.pdf
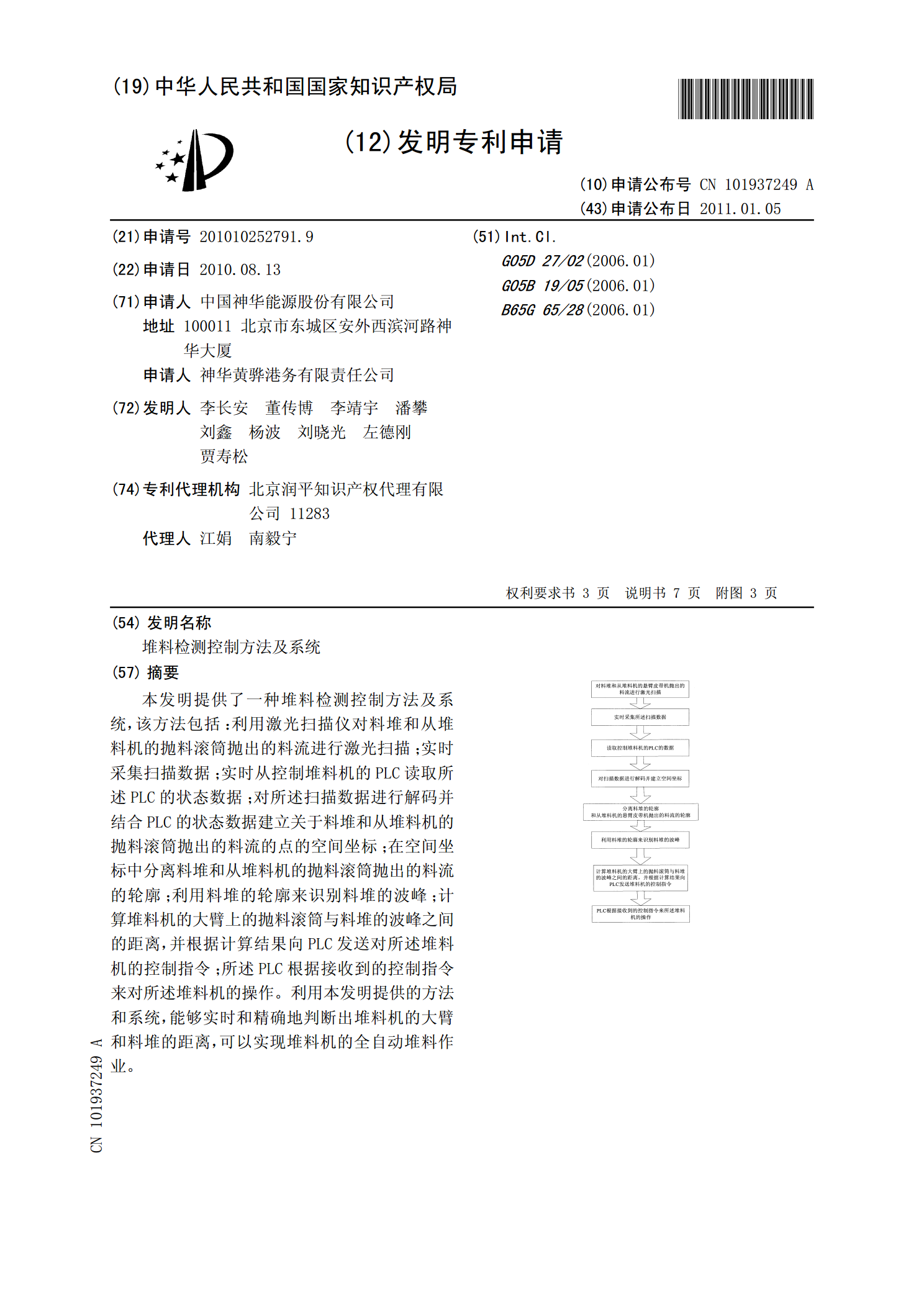
本发明提供了一种堆料检测控制方法及系统,该方法包括:利用激光扫描仪对料堆和从堆料机的抛料滚筒抛出的料流进行激光扫描;实时采集扫描数据;实时从控制堆料机的PLC读取所述PLC的状态数据;对所述扫描数据进行解码并结合PLC的状态数据建立关于料堆和从堆料机的抛料滚筒抛出的料流的点的空间坐标;在空间坐标中分离料堆和从堆料机的抛料滚筒抛出的料流的轮廓;利用料堆的轮廓来识别料堆的波峰;计算堆料机的大臂上的抛料滚筒与料堆的波峰之间的距离,并根据计算结果向PLC发送对所述堆料机的控制指令;所述PLC根据接收到的控制指令来

自动分料系统、具有该系统的斗轮堆取料机及控制方法.pdf
自动分料系统、具有该系统的斗轮堆取料机及控制方法,自动分料系统包括具有进料口和第一出料口、第二出料口的三通料斗;可转动地设置在三通料斗壳体内部,用于将来料分流至第一出料口或/和第二出料口的挡料板;驱动挡料板转动的驱动机构;控制驱动机构调节挡料板转动角度的控制器;将物料输入三通料斗的进料口、和将三通料斗的第一出料口和第二出料口的物料输出的带式输送机;检测带式输送机来料量的第一红外监测流量系统;检测带式输送机出料量的第二红外监测流量系统;所述第一红外监测流量系统、第二红外监测流量系统与控制器电信号连接;控制器
堆取料机俯仰机构的安全预警控制方法及系统.pdf
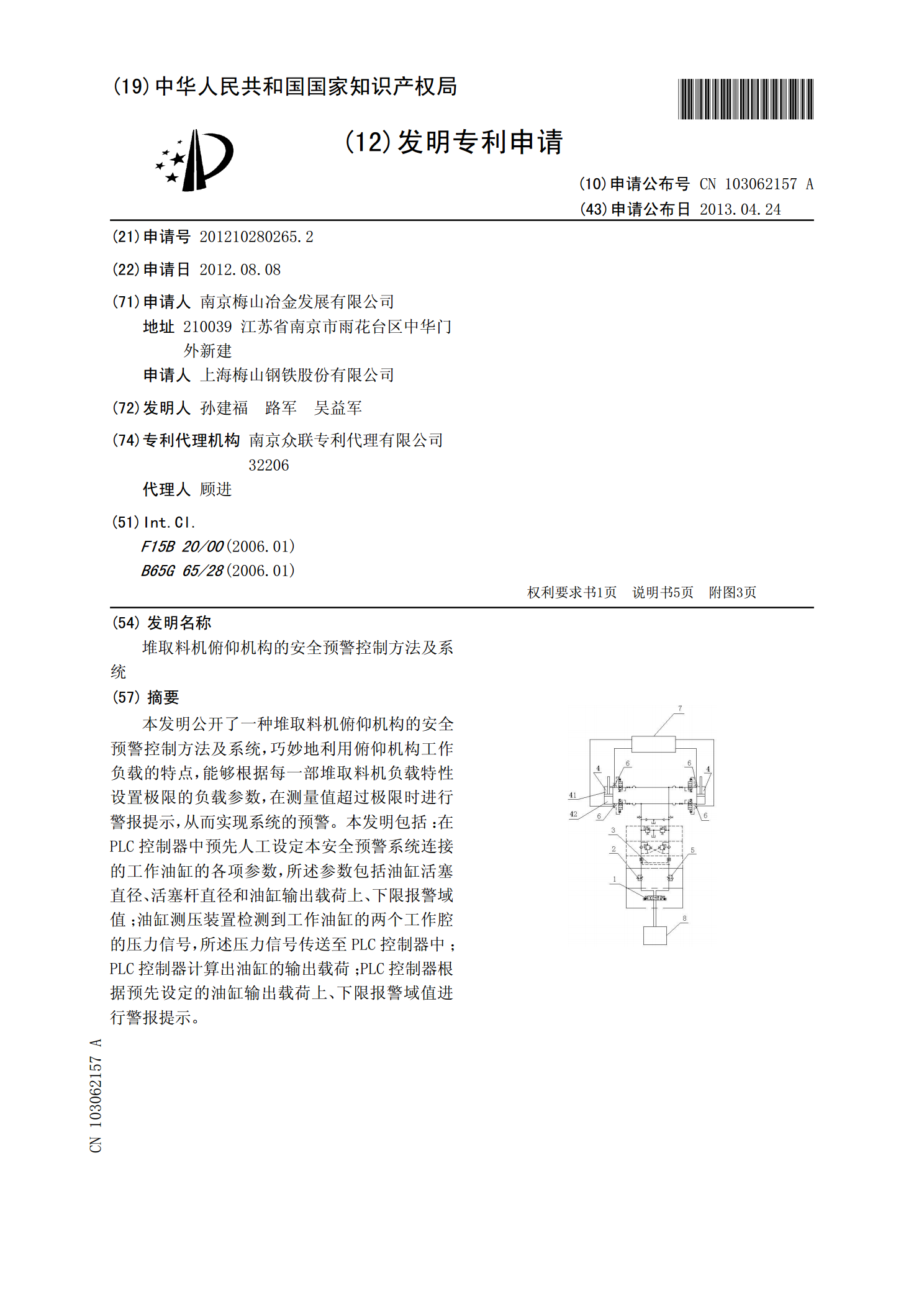
本发明公开了一种堆取料机俯仰机构的安全预警控制方法及系统,巧妙地利用俯仰机构工作负载的特点,能够根据每一部堆取料机负载特性设置极限的负载参数,在测量值超过极限时进行警报提示,从而实现系统的预警。本发明包括:在PLC控制器中预先人工设定本安全预警系统连接的工作油缸的各项参数,所述参数包括油缸活塞直径、活塞杆直径和油缸输出载荷上、下限报警域值;油缸测压装置检测到工作油缸的两个工作腔的压力信号,所述压力信号传送至PLC控制器中;PLC控制器计算出油缸的输出载荷;PLC控制器根据预先设定的油缸输出载荷上、下限报警

悬臂式堆料机控制系统的改造.docx
悬臂式堆料机控制系统的改造悬臂式堆料机控制系统的改造悬臂式堆料机是一种常用的物料储存和堆放设备,它具有结构简单、堆料能力强、适用范围广等优点,被广泛应用于物料储存、制造业等行业。然而,在实际使用过程中,悬臂式堆料机的控制系统存在一些问题,例如控制精度不高、响应速度慢、安全系数不足等,这些问题不仅影响了设备的正常运行,也会导致安全事故的发生。因此,对悬臂式堆料机的控制系统进行改造,提高其控制精度和安全性,具有十分重要的意义。一、悬臂式堆料机控制系统存在的问题1.控制精度不高悬臂式堆料机的控制系统通常采用PL