
一种基于KCF算法的系留无人机自主定位方法.pdf

一吃****仪凡


1/7

2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于KCF算法的系留无人机自主定位方法.pdf
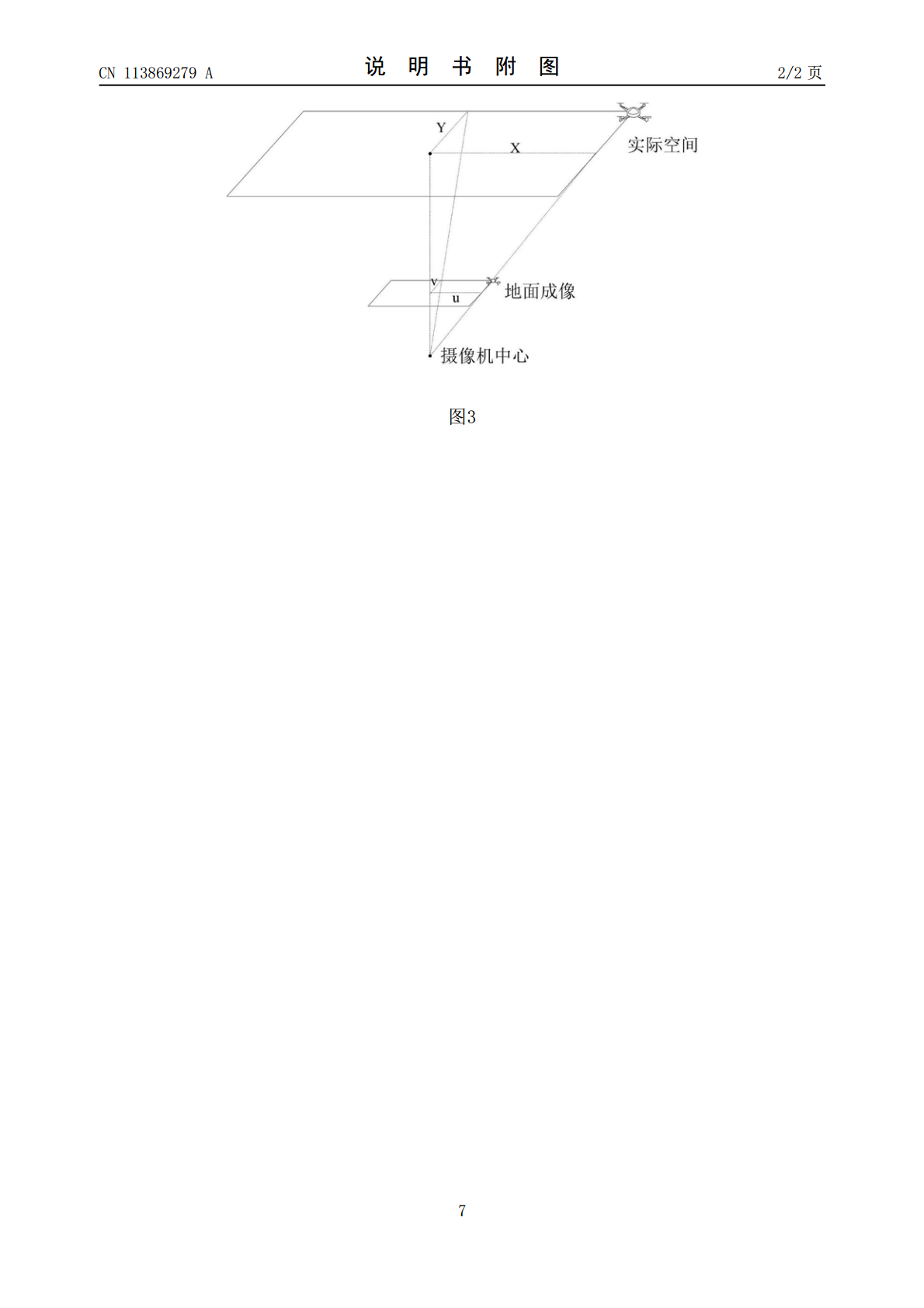
本发明公开了一种基于KCF算法的系留无人机自主定位方法,属于无人机自主定位领域。本发明在卫星和无线电信号拒止环境下,综合考虑系留无人机只能在有限范围内工作的特性,引入地面摄像装置,利用KCF算法实时监控无人机位置,并结合地面摄像装置内置参数和无人机高度计模块测量的高度信息,经计算得到系留无人机的空间位置信息,实现了系留无人机的自主定位。
一种基于力传感的系留无人机定位系统及方法.pdf
本发明公开了一种基于力传感的系留无人机定位系统及方法,通过系留绳缆定位减少了辅助定位传感器的使用,降低了系留无人机的成本,并能有效的克服室外弱GPS环境。在室内无GPS环境下的定位,本发明提高了无人机室内飞行的稳定性。其应用领域范围更广,可应用于更多无或弱GPS场景如:隧洞的巡检以及水电大坝泄洪闸门的巡检,且为地面与空中协同工作的机器人系统引导了新的定位方向。
一种可自主定位的无人机系留平台.pdf
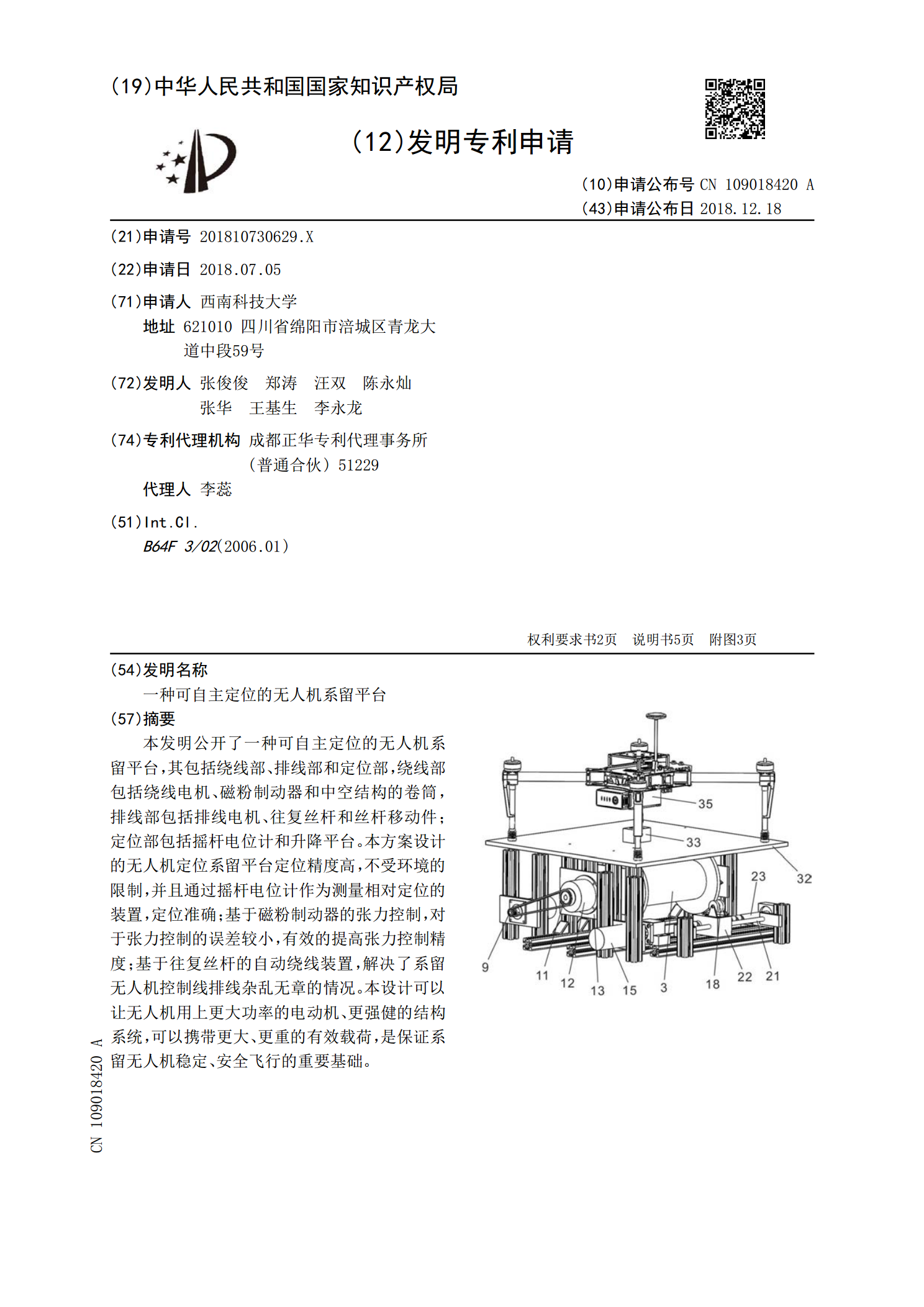
本发明公开了一种可自主定位的无人机系留平台,其包括绕线部、排线部和定位部,绕线部包括绕线电机、磁粉制动器和中空结构的卷筒,排线部包括排线电机、往复丝杆和丝杆移动件;定位部包括摇杆电位计和升降平台。本方案设计的无人机定位系留平台定位精度高,不受环境的限制,并且通过摇杆电位计作为测量相对定位的装置,定位准确;基于磁粉制动器的张力控制,对于张力控制的误差较小,有效的提高张力控制精度;基于往复丝杆的自动绕线装置,解决了系留无人机控制线排线杂乱无章的情况。本设计可以让无人机用上更大功率的电动机、更强健的结构系统,可
系留无人机、系留无人机定位跟随控制系统及其控制方法.pdf
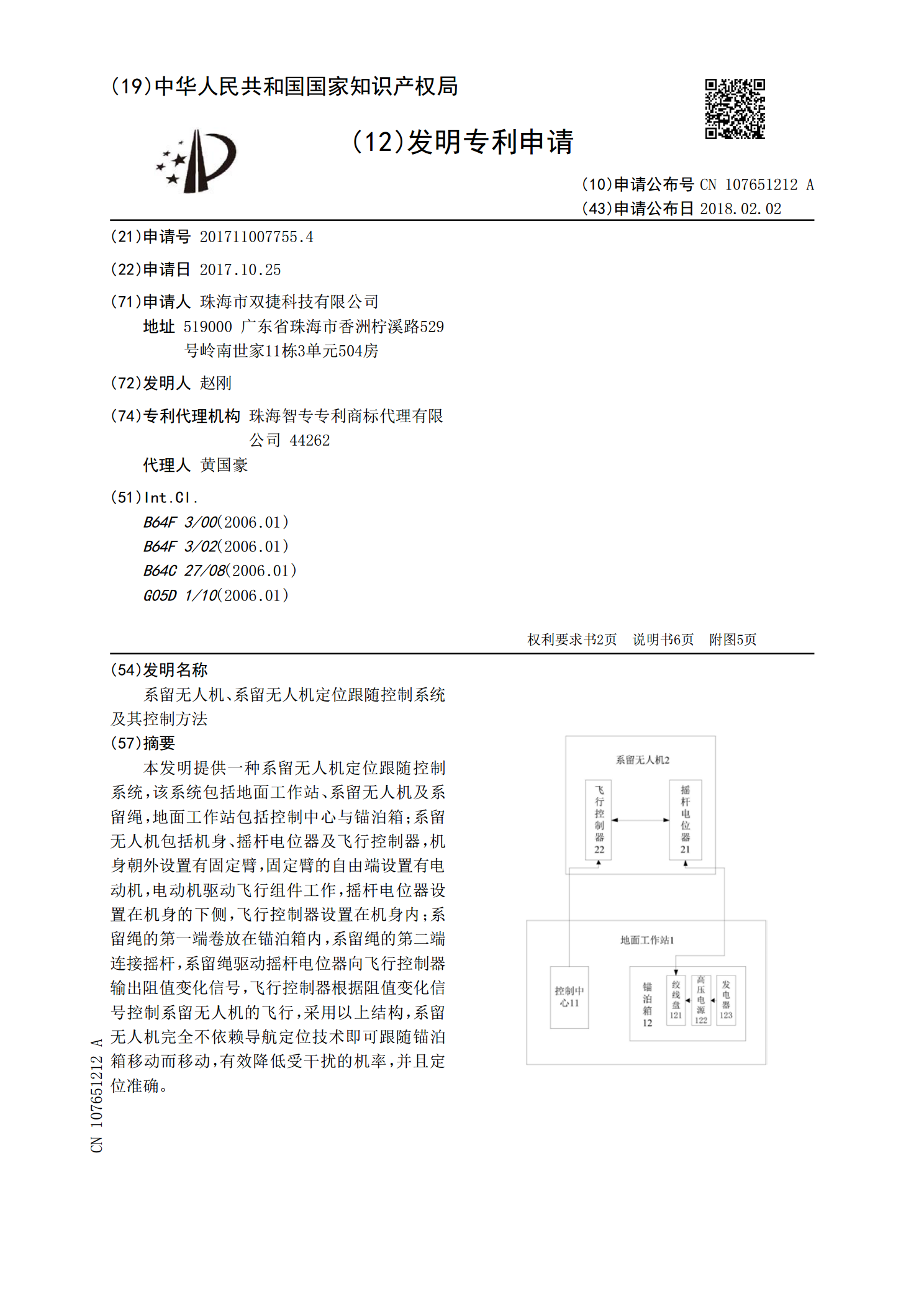
本发明提供一种系留无人机定位跟随控制系统,该系统包括地面工作站、系留无人机及系留绳,地面工作站包括控制中心与锚泊箱;系留无人机包括机身、摇杆电位器及飞行控制器,机身朝外设置有固定臂,固定臂的自由端设置有电动机,电动机驱动飞行组件工作,摇杆电位器设置在机身的下侧,飞行控制器设置在机身内;系留绳的第一端卷放在锚泊箱内,系留绳的第二端连接摇杆,系留绳驱动摇杆电位器向飞行控制器输出阻值变化信号,飞行控制器根据阻值变化信号控制系留无人机的飞行,采用以上结构,系留无人机完全不依赖导航定位技术即可跟随锚泊箱移动而移动,

一种基于卫星图像匹配的无人机自主定位算法.pptx
基于卫星图像匹配的无人机自主定位算法目录添加目录项标题算法概述算法背景算法原理算法流程算法特点卫星图像匹配技术图像匹配技术简介卫星图像匹配原理卫星图像匹配流程卫星图像匹配精度无人机自主定位技术无人机定位技术简介无人机定位原理无人机定位系统组成无人机定位精度算法实现与应用算法实现方式算法应用场景算法应用优势算法应用案例算法性能评估评估方法评估结果结果分析结果比较未来发展与展望算法改进方向技术发展趋势应用前景展望感谢观看