
一种拖地清洁机器人及其工作控制方法.pdf

听容****55


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种拖地清洁机器人及其工作控制方法.pdf
本发明涉及一种拖地清洁机器人及其工作控制方法,其中一种拖地清洁机器人,包括机体,机体的下部设有能对地面进行清洗的拖布组件,拖布组件的底部具有拖布,其特征在于:所述机体上设有用于改变拖布组件对地面施加的压力大小的拖布压力调节机构。与现有技术相比,本发明的优点在于:通过在机体上设有用于改变拖布组件对地面施加的压力大小的拖布压力调节机构,当需要清洁顽固污渍时,增大拖布组件对地面压力,那么拖布施加在地面上的压强也会变大,如果拖布为内部含水的湿拖布,拖布的出水量变大,较大的压强和出水量可以较好清洁软化顽固污渍;正常

智能清洁机器人自清洁拖地控制方法及其装置.pdf
本发明智能清洁机器人自清洁拖地控制方法及其装置,控制方法包括拖板从拖地位置进入污水箱清洁及拖板清洁后从污水箱返回拖地位置的运行过程,装置包括安装在拖板上的喷头,通过水管和喷头相连的水泵,底盘上与水泵相连的储水箱,通过连杆和拖板相连的升降台,安装在竖向支架和横向支架上的电机,套在电机输出轴上的主动带轮,通过同步带与主动带轮相连的从动带轮,驱动升降台的竖向丝杆和导杆,与竖向支架相连的平移台,驱动平移台的横向丝杆和导杆,安装在竖向支架、横向支架上的槽型光电开关,安装在升降台、平移台上的检测片,安装在底盘上的污水
拖地装置、清洁机器人及运动控制方法.pdf
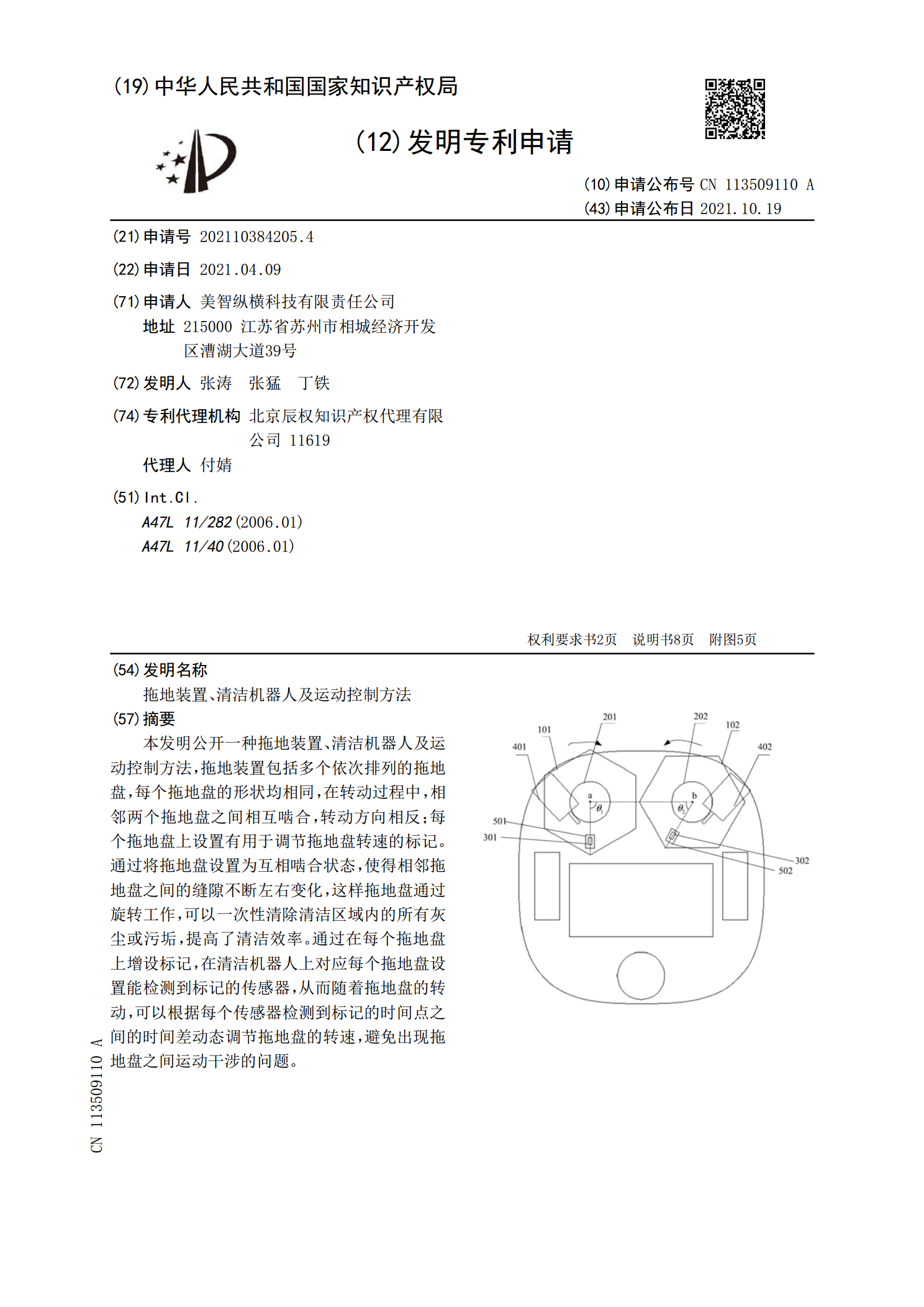
本发明公开一种拖地装置、清洁机器人及运动控制方法,拖地装置包括多个依次排列的拖地盘,每个拖地盘的形状均相同,在转动过程中,相邻两个拖地盘之间相互啮合,转动方向相反;每个拖地盘上设置有用于调节拖地盘转速的标记。通过将拖地盘设置为互相啮合状态,使得相邻拖地盘之间的缝隙不断左右变化,这样拖地盘通过旋转工作,可以一次性清除清洁区域内的所有灰尘或污垢,提高了清洁效率。通过在每个拖地盘上增设标记,在清洁机器人上对应每个拖地盘设置能检测到标记的传感器,从而随着拖地盘的转动,可以根据每个传感器检测到标记的时间点之间的时间

一种喷洒清洁机器人及其控制方法.pdf
本发明公开了一种喷洒清洁机器人及其控制方法,机器人包括:机器人机身以及行走装置,机器人机身上设置有控制柜、监控摄像机、双目相机、机械臂以及喷洒清洁装置,喷洒清洁装置包括喷头组件以及空压机和主储液罐,空压机用于为喷头组件供气,主储液罐用于为喷头组件供液,喷头组件设置在机械臂上,机械臂上还设置有视觉检测装置;控制柜内设置有供电模块、PC机、PLC控制器、机械臂控制器,PC机分别与行走装置、双目相机、视觉检测装置、PLC控制器、机械臂控制器连接;PLC控制器与喷洒清洁装置电性连接。本发明由机械臂搭载喷头组件灵活

清洁机器人及其控制方法.pdf
一种清洁机器人,用以清洁一特定区域,并包括一移动模块、一声波模块、一清扫模块以及一控制模块。移动模块具有多个滚轮。声波模块发射一声波,并接收多个反射波。清扫模块进行一清洁任务。控制模块根据反射波,产生一轮廓线,并根据轮廓线,控制移动模块及清扫模块的至少一者。