
智能清洁机器人自清洁拖地控制方法及其装置.pdf

书生****35


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

智能清洁机器人自清洁拖地控制方法及其装置.pdf
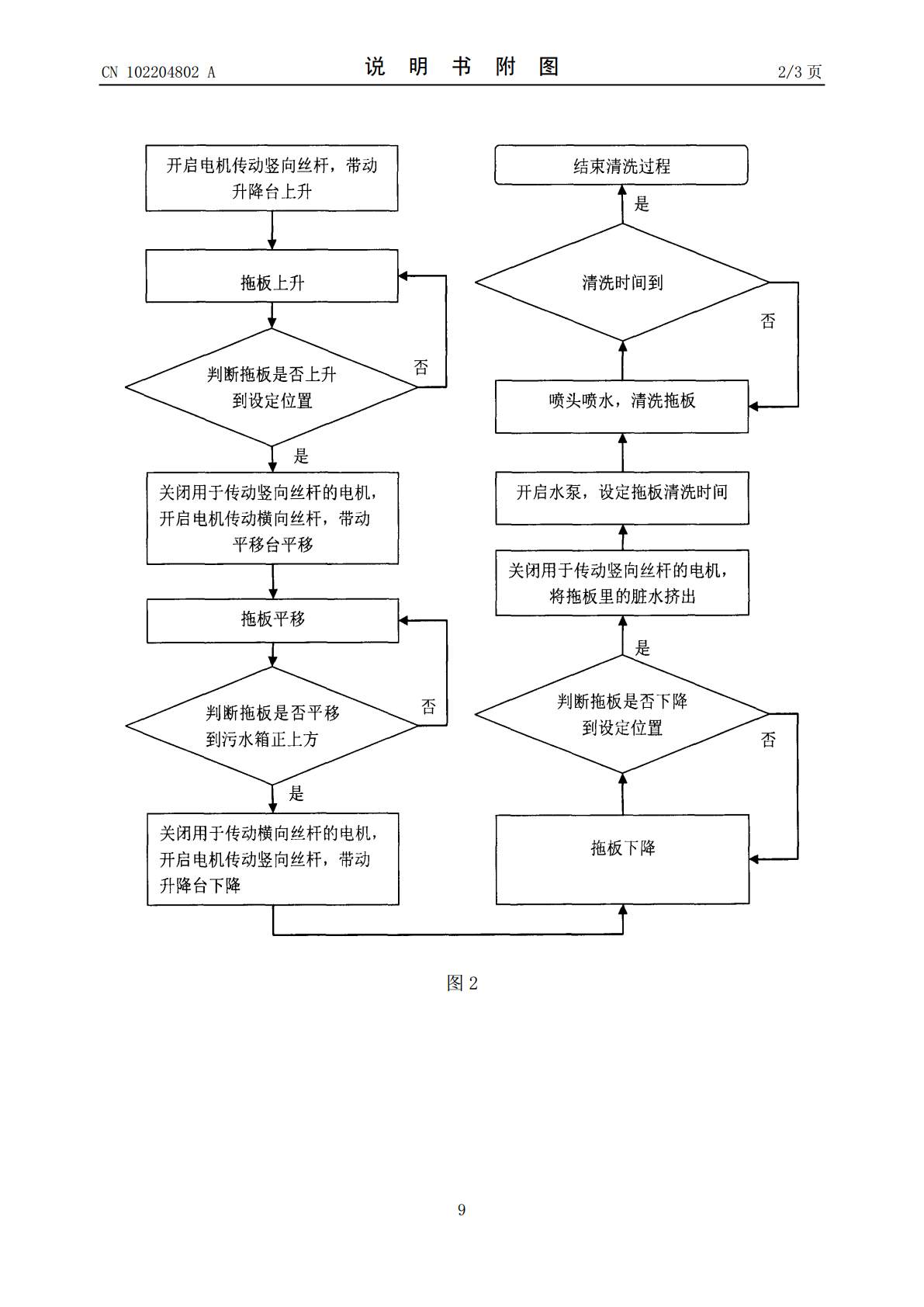
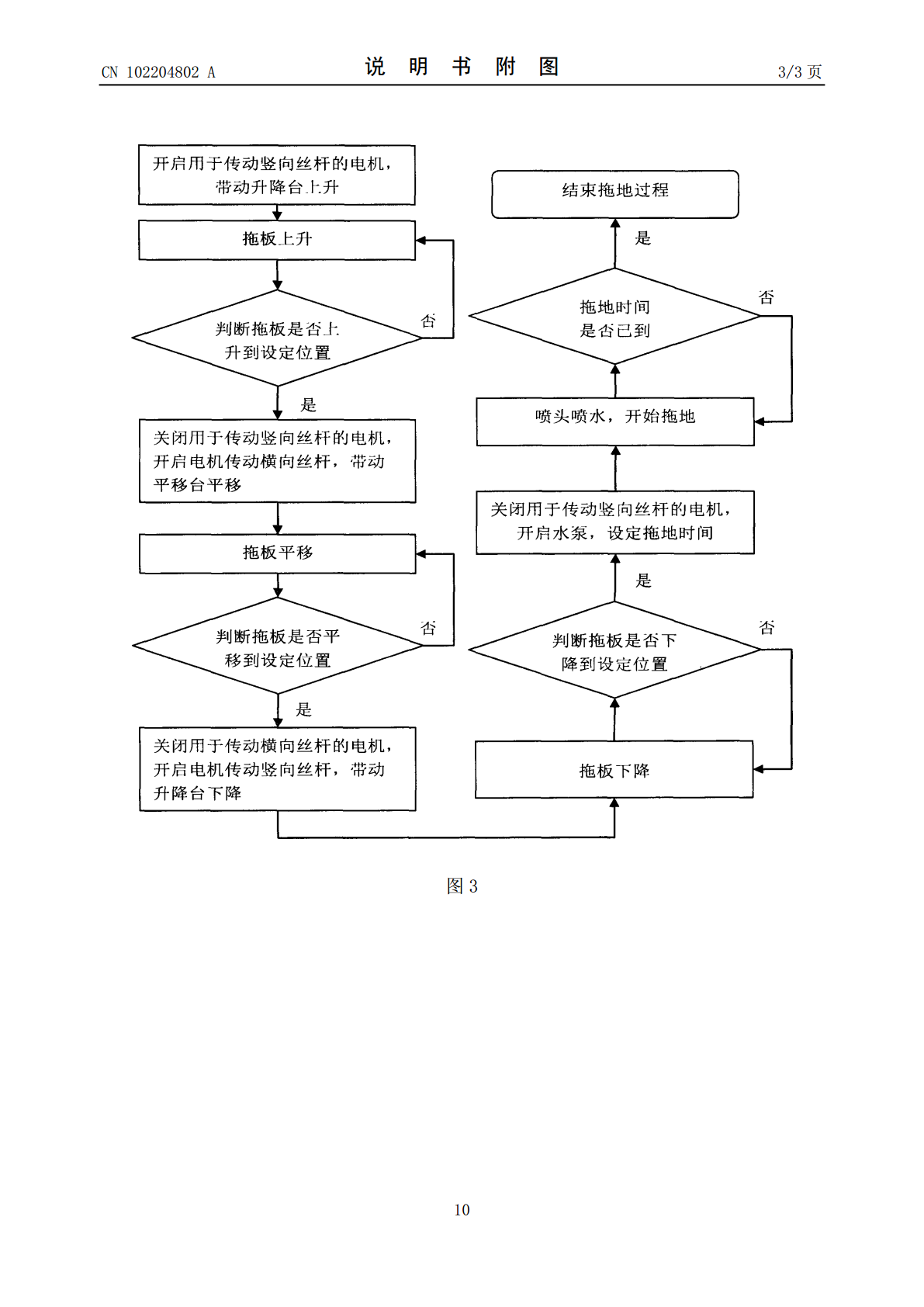
本发明智能清洁机器人自清洁拖地控制方法及其装置,控制方法包括拖板从拖地位置进入污水箱清洁及拖板清洁后从污水箱返回拖地位置的运行过程,装置包括安装在拖板上的喷头,通过水管和喷头相连的水泵,底盘上与水泵相连的储水箱,通过连杆和拖板相连的升降台,安装在竖向支架和横向支架上的电机,套在电机输出轴上的主动带轮,通过同步带与主动带轮相连的从动带轮,驱动升降台的竖向丝杆和导杆,与竖向支架相连的平移台,驱动平移台的横向丝杆和导杆,安装在竖向支架、横向支架上的槽型光电开关,安装在升降台、平移台上的检测片,安装在底盘上的污水
拖地装置、清洁机器人及运动控制方法.pdf
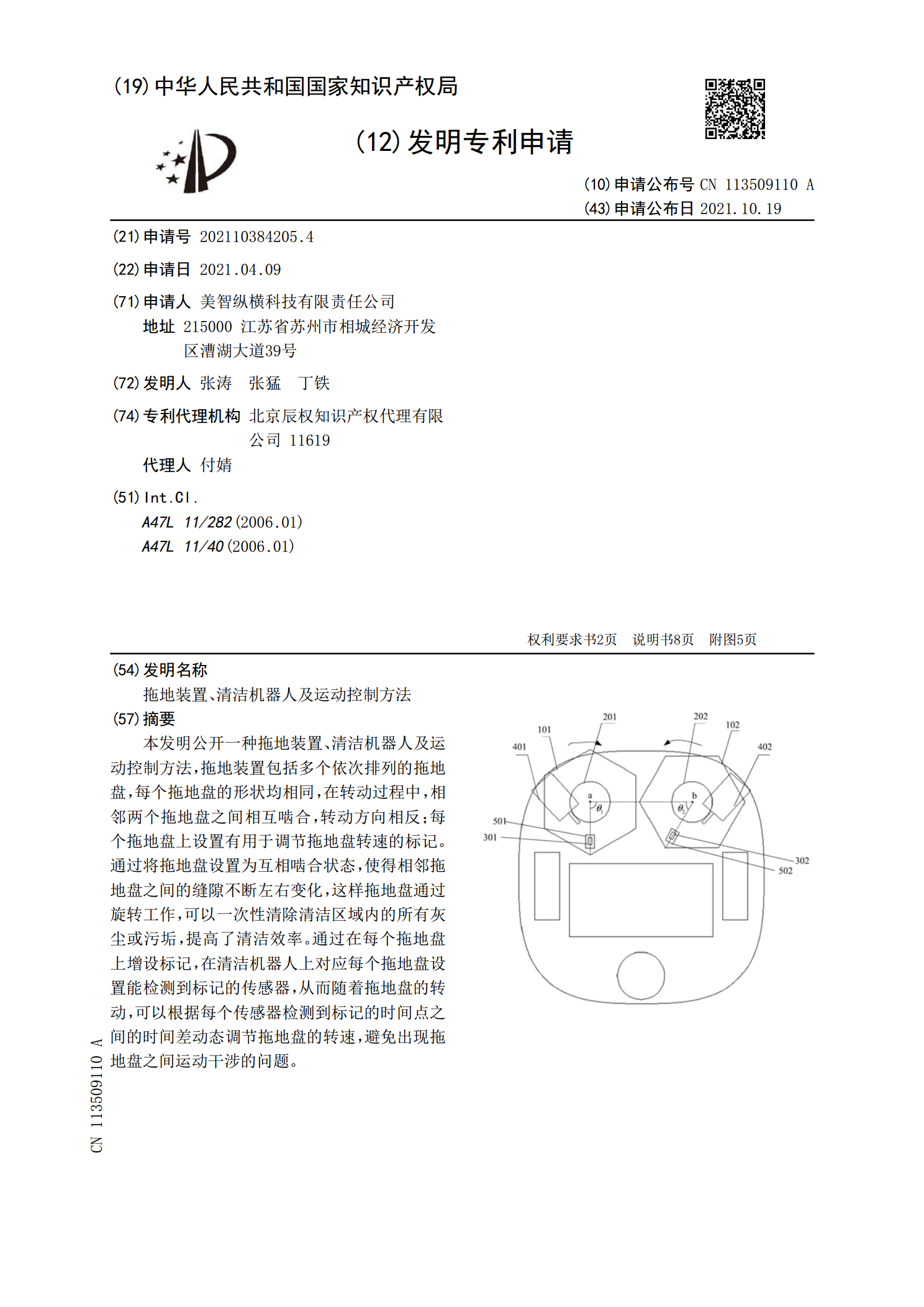
本发明公开一种拖地装置、清洁机器人及运动控制方法,拖地装置包括多个依次排列的拖地盘,每个拖地盘的形状均相同,在转动过程中,相邻两个拖地盘之间相互啮合,转动方向相反;每个拖地盘上设置有用于调节拖地盘转速的标记。通过将拖地盘设置为互相啮合状态,使得相邻拖地盘之间的缝隙不断左右变化,这样拖地盘通过旋转工作,可以一次性清除清洁区域内的所有灰尘或污垢,提高了清洁效率。通过在每个拖地盘上增设标记,在清洁机器人上对应每个拖地盘设置能检测到标记的传感器,从而随着拖地盘的转动,可以根据每个传感器检测到标记的时间点之间的时间

一种拖地清洁机器人及其工作控制方法.pdf
本发明涉及一种拖地清洁机器人及其工作控制方法,其中一种拖地清洁机器人,包括机体,机体的下部设有能对地面进行清洗的拖布组件,拖布组件的底部具有拖布,其特征在于:所述机体上设有用于改变拖布组件对地面施加的压力大小的拖布压力调节机构。与现有技术相比,本发明的优点在于:通过在机体上设有用于改变拖布组件对地面施加的压力大小的拖布压力调节机构,当需要清洁顽固污渍时,增大拖布组件对地面压力,那么拖布施加在地面上的压强也会变大,如果拖布为内部含水的湿拖布,拖布的出水量变大,较大的压强和出水量可以较好清洁软化顽固污渍;正常

清洁装置、清洁机器人及清洁装置的控制方法.pdf
本发明提供了一种清洁装置、清洁机器人及清洁装置的控制方法。清洁装置包括机体;信息采集部,信息采集部与机体连接,信息采集部用于获取待清洁位置处的清洁信息;清洁部,清洁部与机体连接;控制器,控制器与信息采集部和清洁部电性连接,控制器包括接收器和处理器,接收器用于接收清洁信息,处理器基于清洁信息生成控制信息,清洁部基于控制信息执行对应的预设动作;其中,清洁信息包括残留污渍信息,处理器基于残留污渍信息生成控制信息,以控制机体返回残留有污渍的清洁位置处进行再次清洁作业。采用本申请的技术方案,有效地解决了现有技术中清

涂胶装置及其自清洁方法.pdf
本发明提供一种涂胶装置及其自清洁方法。该涂胶装置通过在胶材管道中设置固定隔板将胶材管道分隔为胶材储存管道及第一气体管道,通过在涂胶管道中设置活动挡板将涂胶管道分隔为胶材流通管道及第二气体管道,在完成框胶涂布作业后,通过气体控制单元对胶材管道和涂胶管道调节气压控制活动挡板向胶材流通管道方向摆动,阻断胶材流向涂胶喷嘴的通道而连通第二气体管道与涂胶喷嘴,通过清洁气体的持续冲刷来清除残留的胶材,实现自清洁功能。