
岸桥吊具防碰撞监控方法.pdf

一条****涛k

1/7
2/7
3/7
4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
岸桥吊具防碰撞监控方法.pdf
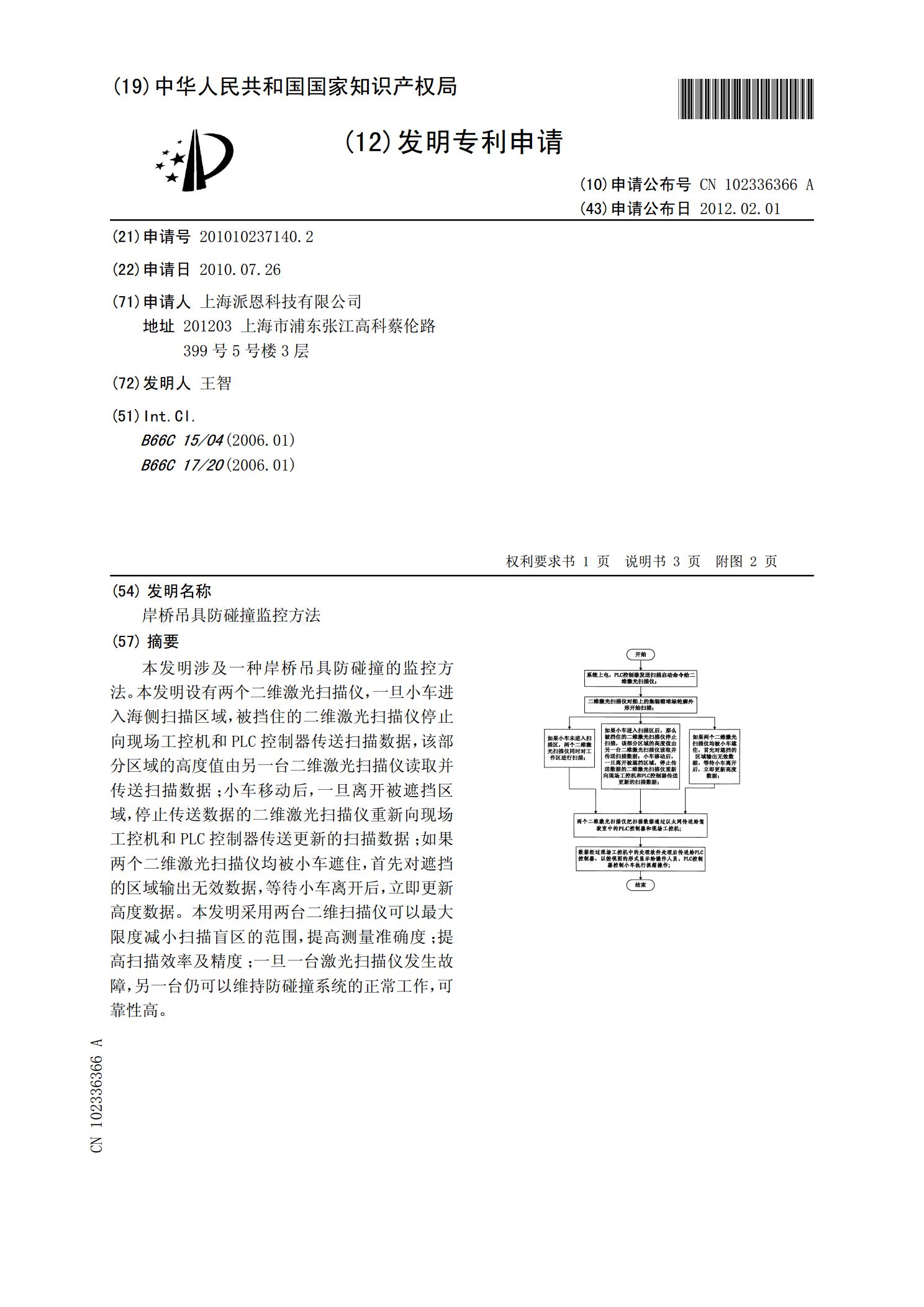
本发明涉及一种岸桥吊具防碰撞的监控方法。本发明设有两个二维激光扫描仪,一旦小车进入海侧扫描区域,被挡住的二维激光扫描仪停止向现场工控机和PLC控制器传送扫描数据,该部分区域的高度值由另一台二维激光扫描仪读取并传送扫描数据;小车移动后,一旦离开被遮挡区域,停止传送数据的二维激光扫描仪重新向现场工控机和PLC控制器传送更新的扫描数据;如果两个二维激光扫描仪均被小车遮住,首先对遮挡的区域输出无效数据,等待小车离开后,立即更新高度数据。本发明采用两台二维扫描仪可以最大限度减小扫描盲区的范围,提高测量准确度;提高扫

岸桥简易空箱吊具的应用.docx
岸桥简易空箱吊具的应用岸桥简易空箱吊具是一种非常实用的装卸工具,其主要应用于港口场地和货船上对空箱的操作。相比传统的空箱吊具,这种吊具具有结构更为简洁,作用更加灵活、高效的优点。本文将从以下几个方面深入探讨岸桥简易空箱吊具的应用。一、岸桥简易空箱吊具的结构及使用方法岸桥简易空箱吊具由主机、固定机构、抱箱臂、斜臂等组成,其主要工作原理是通过把空箱的角部夹在两个臂之间使其保持平衡。在使用过程中,先要将抱箱臂放下,再由叉臂升起来夹住箱角。在装卸完成后,将空箱放回地面并将抱箱臂折叠,收回斜臂即可。二、岸桥简易空箱

GE电控岸桥与吊具的通信改造.docx
GE电控岸桥与吊具的通信改造随着工业自动化和信息化的普及,升级机器设备的需求日益增加。对于港口物流行业来说,固定装卸设备——岸桥更是基础设施之一。作为灵魂部件的吊具,是起重机操作的核心之一。为了更好地与时俱进,我们公司决定对GE电控岸桥与吊具的通信进行改造。首先,我们需要了解为何进行这样的改造。早期的GE电控岸桥以及吊具通常采用串口通信,数据传输速度较慢,并且通信稳定性不高。而现在,随着物联网技术和各种新型传感器的发展,需要更加快速可靠的通信系统,以满足操作需求,并提高设备的效率和安全性。因此,我们提出了

岸桥吊具防止误锁的技术措施.docx
岸桥吊具防止误锁的技术措施岸桥吊具是一种用于装卸和搬运货物的起重设备,它通过吊钩、起升机构、行走机构等组成,广泛应用于港口、仓库等地方。然而,在使用岸桥吊具时,误锁可能会造成安全隐患和经济损失。因此,针对岸桥吊具的误锁问题,我们需要采取一系列的技术措施来预防和解决这个问题。首先,岸桥吊具的防误锁技术需要从设计和制造的角度入手。设计人员应该充分考虑各部件的结构和工作原理,避免因为设计缺陷导致误锁的发生。例如,可以增加安全开关、传感器等装置,监测各个部件的工作状态,一旦发现异常情况及时报警或采取相应的措施。此

岸桥伸缩式集装箱吊具的研究.docx
岸桥伸缩式集装箱吊具的研究岸桥伸缩式集装箱吊具的研究摘要:岸桥伸缩式集装箱吊具是港口装卸作业过程中非常重要的设备之一。本论文通过对岸桥伸缩式集装箱吊具的研究,主要从结构、功能、工作原理等方面进行分析和研究。通过对现有研究成果的总结和对比,进一步提出了岸桥伸缩式集装箱吊具的未来发展方向和问题。本研究对于提高港口装卸作业的效率和安全性具有一定的指导意义。关键词:岸桥;伸缩式集装箱吊具;结构;功能;工作原理一、引言岸桥伸缩式集装箱吊具作为港口装卸作业中重要的设备之一,主要用于集装箱的起重和堆垛操作。随着航运业的