
图像处理方法、装置和设备.pdf

文宣****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
图像处理装置、图像形成设备和图像处理方法.pdf
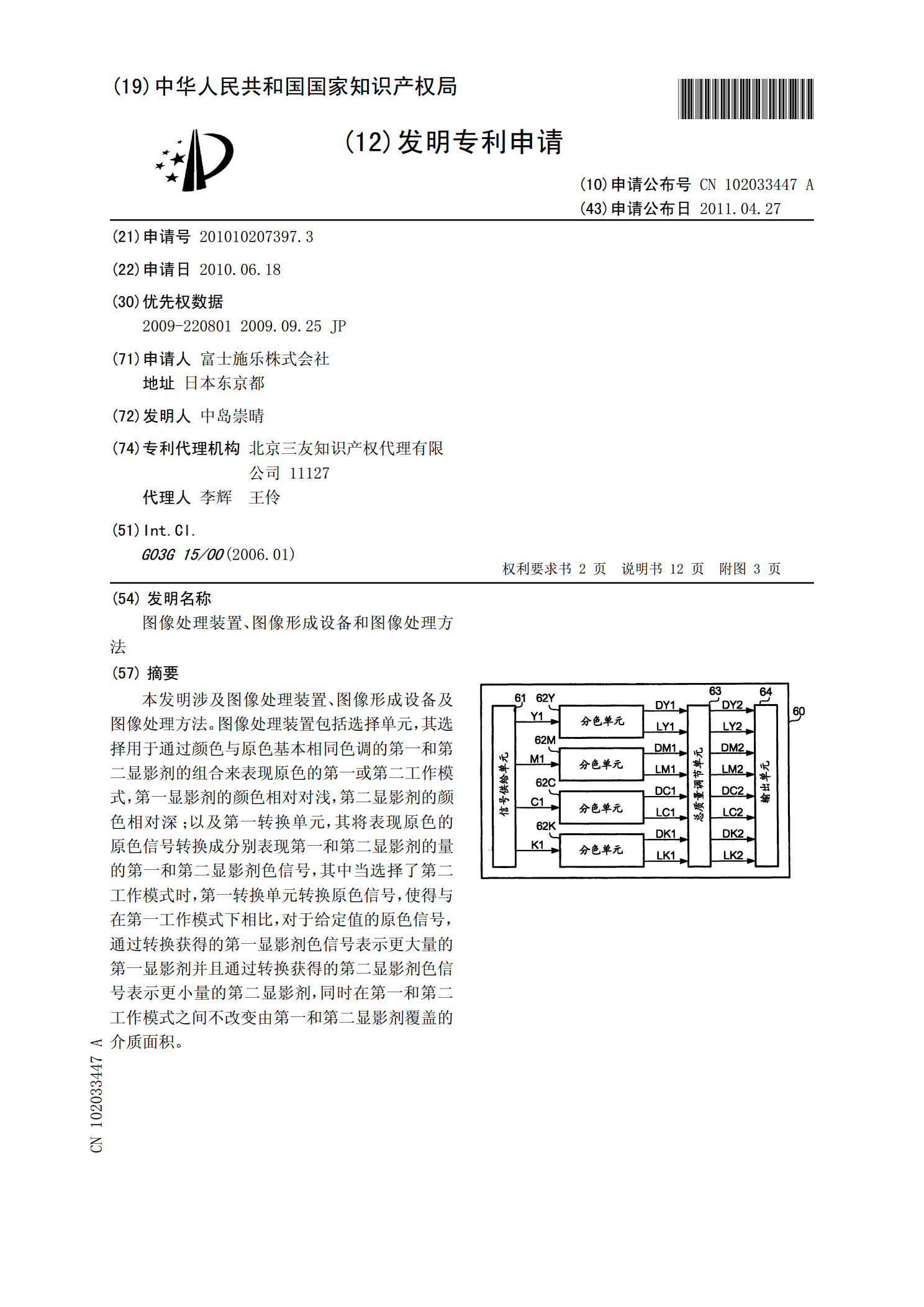
本发明涉及图像处理装置、图像形成设备及图像处理方法。图像处理装置包括选择单元,其选择用于通过颜色与原色基本相同色调的第一和第二显影剂的组合来表现原色的第一或第二工作模式,第一显影剂的颜色相对对浅,第二显影剂的颜色相对深;以及第一转换单元,其将表现原色的原色信号转换成分别表现第一和第二显影剂的量的第一和第二显影剂色信号,其中当选择了第二工作模式时,第一转换单元转换原色信号,使得与在第一工作模式下相比,对于给定值的原色信号,通过转换获得的第一显影剂色信号表示更大量的第一显影剂并且通过转换获得的第二显影剂色信号

图像处理方法、装置和设备.pdf
本申请实施例提供一种图像处理方法、装置和设备,所述方法包括:获得第一图像中每个像素点的第一灰度值以及所有像素点的第一灰度值均值;将所述第一灰度值均值输入预设拟合曲线中,得到第一阈值;分别获得所述第一图像中每个像素点的第一灰度值与其周围预设数量像素点的灰度值之间的第一差值;分别将每个所述像素点的第一差值与所述第一阈值进行比较,基于比较结果确定所述像素点的第二灰度值;基于每个所述像素点的第二灰度值,输出第二图像,其能够识别图像中的噪声点(例如随机噪点),并对识别到的噪声点进行校正,而不会对图像中正常像素点进行

图像处理方法和图像处理装置以及检测设备.pdf
本发明提供了一种图像处理方法、一种图像处理装置以及一种检测设备。基于本发明,可以利用由ROI和ROS的区域标定信息确定的检测区域创建检测掩膜图像,由于检测区域被界定在ROI与ROS的非重叠区域,因而利用检测区域创建的检测掩膜图像可以具有利用ROS对ROI局部屏蔽的效果,从而,利用有效区域被约束在检测区域的检测掩膜图像对目标图像进行区域有效性过滤,可以只保留目标图像中被圈定在ROI中未被ROS屏蔽的局部区域内的图像原值,进而可以排除ROS中的内部干扰和冗余的图像处理,有助于提高对目标图像的图像处理辨识精度和

图像处理方法、图像处理装置和电子设备.pdf
本公开提供了用于云真机系统的图像处理方法、图像处理装置和电子设备。图像处理方法包括:实时采集屏幕上显示的连续图像帧;缓存采集的连续图像帧;每隔预定时间间隔,渲染缓存的连续图像帧中当前时刻的图像帧,并且输出渲染后的当前时刻的图像帧;以及硬件编码渲染后的当前时刻的图像帧,生成并且输出对应于屏幕上显示的连续图像帧的视频流。通过利用电子设备端的硬件编码器执行屏幕图像的编码,减小了云真机系统的延迟,并且降低了对于本地处理设备的硬件要求,增加了单台远程处理设备能够接入的电子设备的数量,降低了部署成本。此外,电子设备直
图像处理方法、图像处理装置和电子设备.pdf
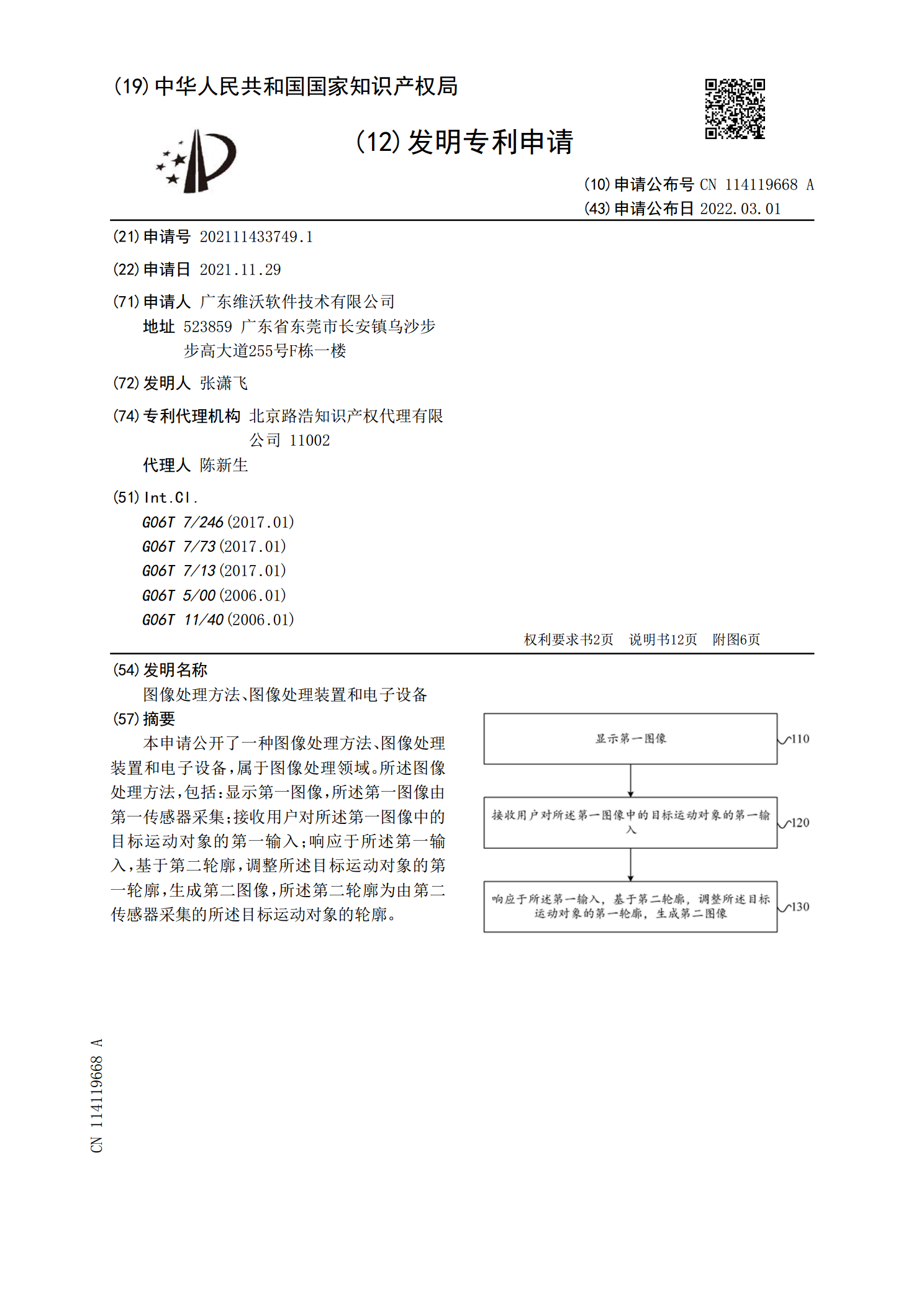
本申请公开了一种图像处理方法、图像处理装置和电子设备,属于图像处理领域。所述图像处理方法,包括:显示第一图像,所述第一图像由第一传感器采集;接收用户对所述第一图像中的目标运动对象的第一输入;响应于所述第一输入,基于第二轮廓,调整所述目标运动对象的第一轮廓,生成第二图像,所述第二轮廓为由第二传感器采集的所述目标运动对象的轮廓。