
一种平衡车及其支撑骨架.pdf

Th****84


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种平衡车及其支撑骨架.pdf
本申请公开了一种平衡车及其支撑骨架,所述支撑骨架上设有能够感测支撑骨架所受扭矩的第一检测部,所述第一检测部包括能够分别体现支撑骨架两端所产生扭矩的第一固定部和第二固定部,所述第一固定部和第二固定部之间预留有间隙,所述第一固定部与第二固定部之间的间隙处设置有传感器,所述传感器能够检测第一固定部和第二固定部之间的相对位移;通过设置检测部,可以将支撑骨架的扭转转化为第一固定部与第二固定部之间的位移,从而精准判断使用者的转弯意图,控制平衡车做出相应的转弯动作。
人机互动体感车及其支撑骨架.pdf
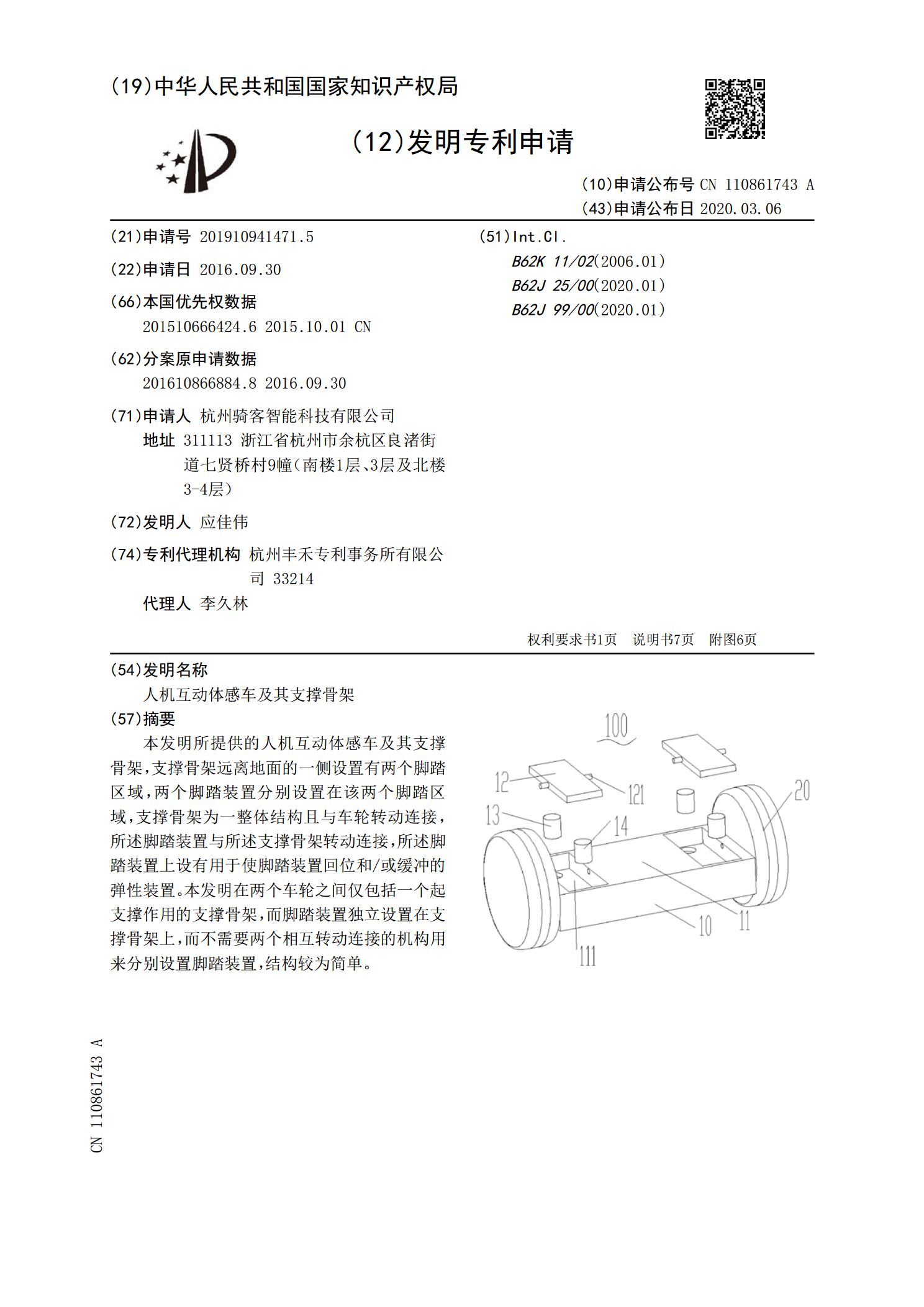
本发明所提供的人机互动体感车及其支撑骨架,支撑骨架远离地面的一侧设置有两个脚踏区域,两个脚踏装置分别设置在该两个脚踏区域,支撑骨架为一整体结构且与车轮转动连接,所述脚踏装置与所述支撑骨架转动连接,所述脚踏装置上设有用于使脚踏装置回位和/或缓冲的弹性装置。本发明在两个车轮之间仅包括一个起支撑作用的支撑骨架,而脚踏装置独立设置在支撑骨架上,而不需要两个相互转动连接的机构用来分别设置脚踏装置,结构较为简单。

人机互动体感车及其支撑骨架.pdf
本发明公开了一种结构简洁的人机互动体感车及其支撑骨架。该支撑骨架内形成用于收纳电源和控制装置的收容腔,该支撑骨架上设置两个脚踏装置,该支撑骨架的左右两端与车轮转动连接,该支撑骨架为一整体结构,该整体结构为分体组装而成的。本技术方案结构简单,在两个车轮之间仅包括一个起支撑作用的管状支撑骨架,而脚踏装置独立设置在支撑骨架上,而不需要相互转动连接的两个脚踏机构来分别设置脚踏装置,对比市面上现有平衡车或扭扭车,结构简单,车体为一体式,可扩展性强,减化方向杆或车身分开转动结构,车身更坚固。

人机互动体感车及其支撑骨架.pdf
本发明公开了一种人机互动体感车及其支撑骨架,该支撑骨架包括用于与车轮连接的车轮连接部和用于支撑脚踏部件的支撑部,车轮连接部和支撑部一体成型或者固定连接形成支撑骨架;支撑骨架的左右两端分别设置一个车轮连接部,左右两个车轮连接部分别连接的车轮具有共同的车轮轴线,左右两个支撑部设置在两个车轮之间,支撑部和脚踏部件之间设有板状或片状的压力传感器。本技术方案结构简单可靠,零部件少,制造成本低。

电动平衡车及其支撑机构.pdf
本发明公开了一种电动平衡车,包括主体、通过轮轴连接于主体上的两车轮;所述主体的下部设有用以支撑电动平衡车的支撑机构,该支撑机构包括安装于主体下部的固定体及通过一转轴安装于固定体上的撑脚,该撑脚通过转轴可在撑开及闭合状态间旋转。本发明的支撑机构的撑脚通过转轴可在撑开及闭合状态间旋转,在撑开转态时,能够与两个车轮形成三点支撑,可以稳定地支撑车体。