
一种基于超宽带的无人机辅助定位方法及系统.pdf

兴朝****45


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于超宽带的无人机辅助定位方法及系统.pdf
本发明公开了一种基于超宽带的无人机辅助定位方法及系统,该方法包括获取第一超宽带定位模组的姿态数据及所述第一超宽带定位模组与第二超宽带定位模组之间的测距值;通过扩展卡尔曼滤波算法融合所述姿态数据以及所述测距值。在超宽带基站间距受限的情况下,通过对测距和定位两个阶段进行优化,从而提升超宽带定位精度。采用扩展卡尔曼滤波算法融合超宽带测距与姿态数据,动态调整测量噪声统计特性,降低超宽带测距误差,进而提升了超宽带测距定位精度,降低了无人机对卫星信号的依赖性,综合了超宽带测距和惯性导航定位,解决了系留无人机在卫星信号
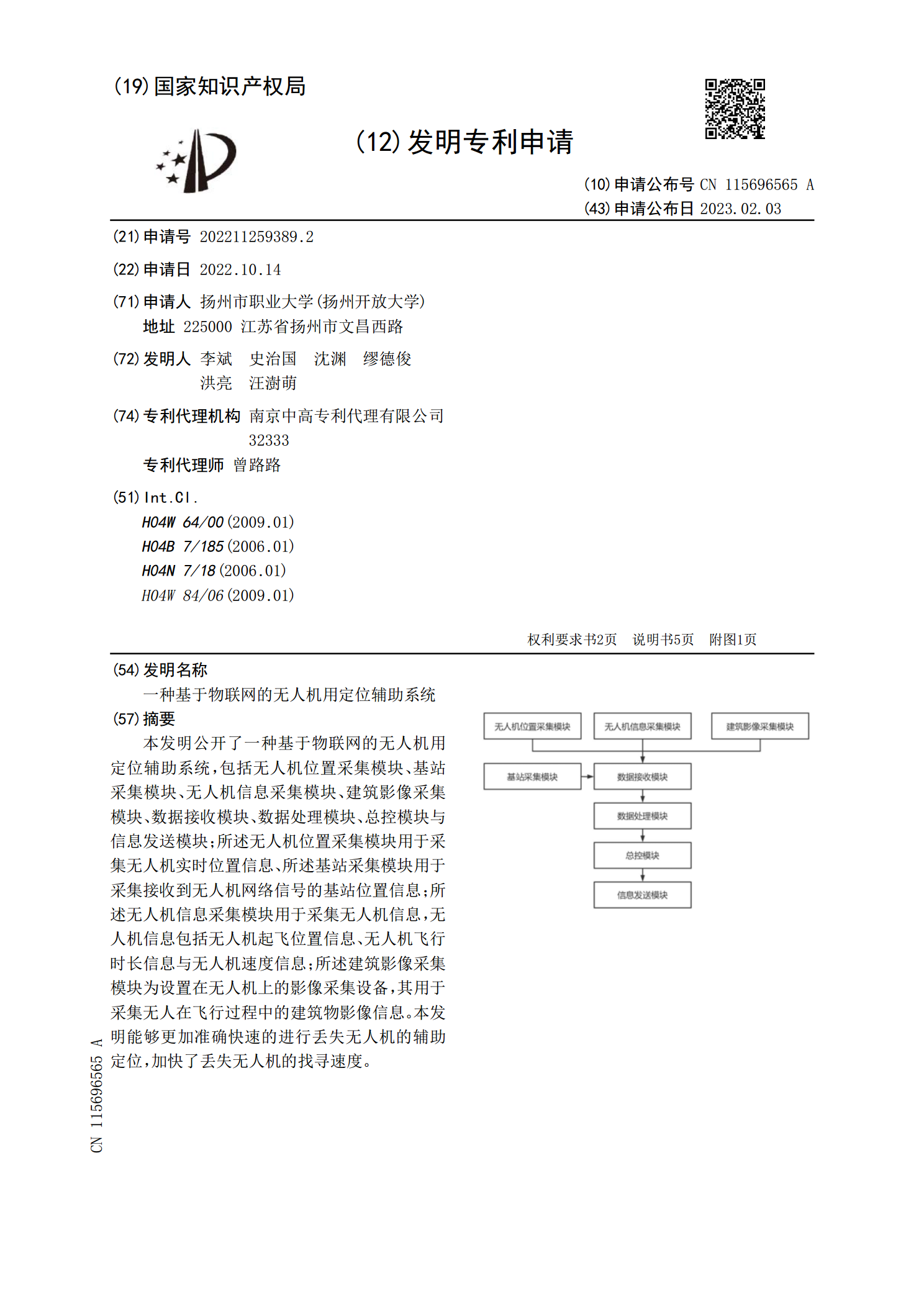
一种基于物联网的无人机用定位辅助系统.pdf
本发明公开了一种基于物联网的无人机用定位辅助系统,包括无人机位置采集模块、基站采集模块、无人机信息采集模块、建筑影像采集模块、数据接收模块、数据处理模块、总控模块与信息发送模块;所述无人机位置采集模块用于采集无人机实时位置信息、所述基站采集模块用于采集接收到无人机网络信号的基站位置信息;所述无人机信息采集模块用于采集无人机信息,无人机信息包括无人机起飞位置信息、无人机飞行时长信息与无人机速度信息;所述建筑影像采集模块为设置在无人机上的影像采集设备,其用于采集无人在飞行过程中的建筑物影像信息。本发明能够更加
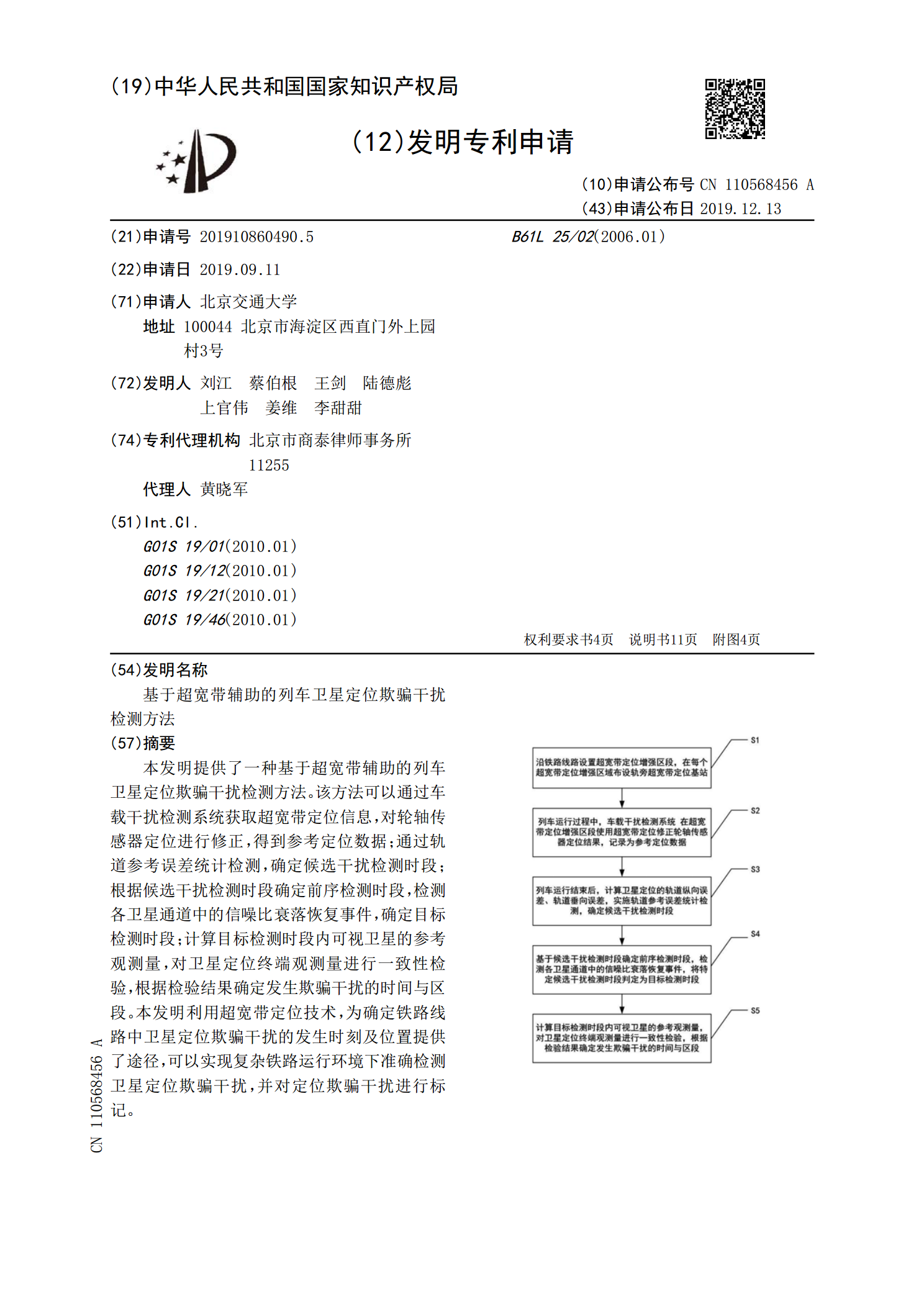
基于超宽带辅助的列车卫星定位欺骗干扰检测方法.pdf
本发明提供了一种基于超宽带辅助的列车卫星定位欺骗干扰检测方法。该方法可以通过车载干扰检测系统获取超宽带定位信息,对轮轴传感器定位进行修正,得到参考定位数据;通过轨道参考误差统计检测,确定候选干扰检测时段;根据候选干扰检测时段确定前序检测时段,检测各卫星通道中的信噪比衰落恢复事件,确定目标检测时段;计算目标检测时段内可视卫星的参考观测量,对卫星定位终端观测量进行一致性检验,根据检验结果确定发生欺骗干扰的时间与区段。本发明利用超宽带定位技术,为确定铁路线路中卫星定位欺骗干扰的发生时刻及位置提供了途径,可以实现

一种基于超宽带定位的TDOA调度系统和方法.pdf
本发明公开了一种基于超宽带定位的TDOA调度系统和方法,其中调度系统包括同步基站,至少四个普通基站,数据中转模块,PC端,移动标签。同步基站用于周期广播同步消息;普通基站将本地时钟与同步基站时间同步;移动标签设置于定位目标上,广播定位请求;普通基站经数据中转模块向PC端发送定位请求时间信息,PC端根据定位请求时间信息采取TDOA定位算法计算移动标签的位置。该系统通过确定移动标签在传输时间内允许发送的最大消息数和同步基站在同步消息广播周期内允许定位传输数的范围,实现整个室内定位的动态调度,提高了系统总容量限

一种为导盲无人机系统进行跟随定位的辅助方法.pdf
本发明公开了一种为导盲无人机系统进行跟随定位的辅助方法,包括以下步骤:穿戴:将具有距离信号发射器的束缚带捆绑与使用者的身体上;本发明通过采用三个距离信号发射器组成的固定三角形加以辅助定位,解决了现有的导盲无人机系统大多数是基于AI图形图像识别定位的无人机导盲技术,存在计算量大,精度受限,容易被遮挡的问题,该为导盲无人机系统进行跟随定位的辅助方法,具备高精度且防遮挡的优点,可以在盲人不影响日常穿着及各项身体活动的情况下,让导盲无人机设备准感知自身相对于盲人的坐标,在盲人位置发生改变时,导盲无人机能准确感知自