
一种基于机械手臂的自动打磨装置.pdf

猫巷****志敏


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于机械手臂的自动打磨装置.pdf
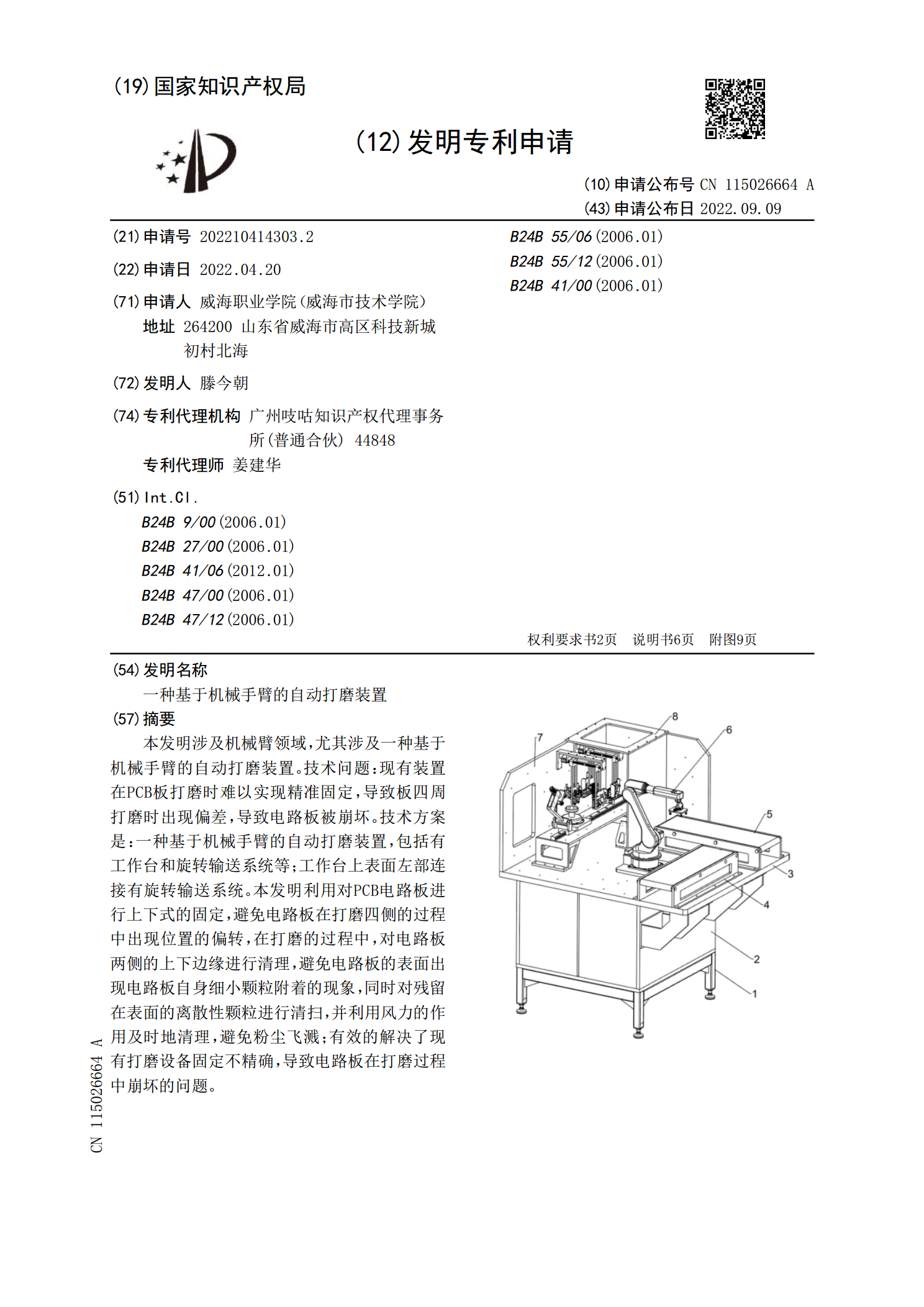
本发明涉及机械臂领域,尤其涉及一种基于机械手臂的自动打磨装置。技术问题:现有装置在PCB板打磨时难以实现精准固定,导致板四周打磨时出现偏差,导致电路板被崩坏。技术方案是:一种基于机械手臂的自动打磨装置,包括有工作台和旋转输送系统等;工作台上表面左部连接有旋转输送系统。本发明利用对PCB电路板进行上下式的固定,避免电路板在打磨四侧的过程中出现位置的偏转,在打磨的过程中,对电路板两侧的上下边缘进行清理,避免电路板的表面出现电路板自身细小颗粒附着的现象,同时对残留在表面的离散性颗粒进行清扫,并利用风力的作用及时
一种机械手臂生产打磨装置.pdf
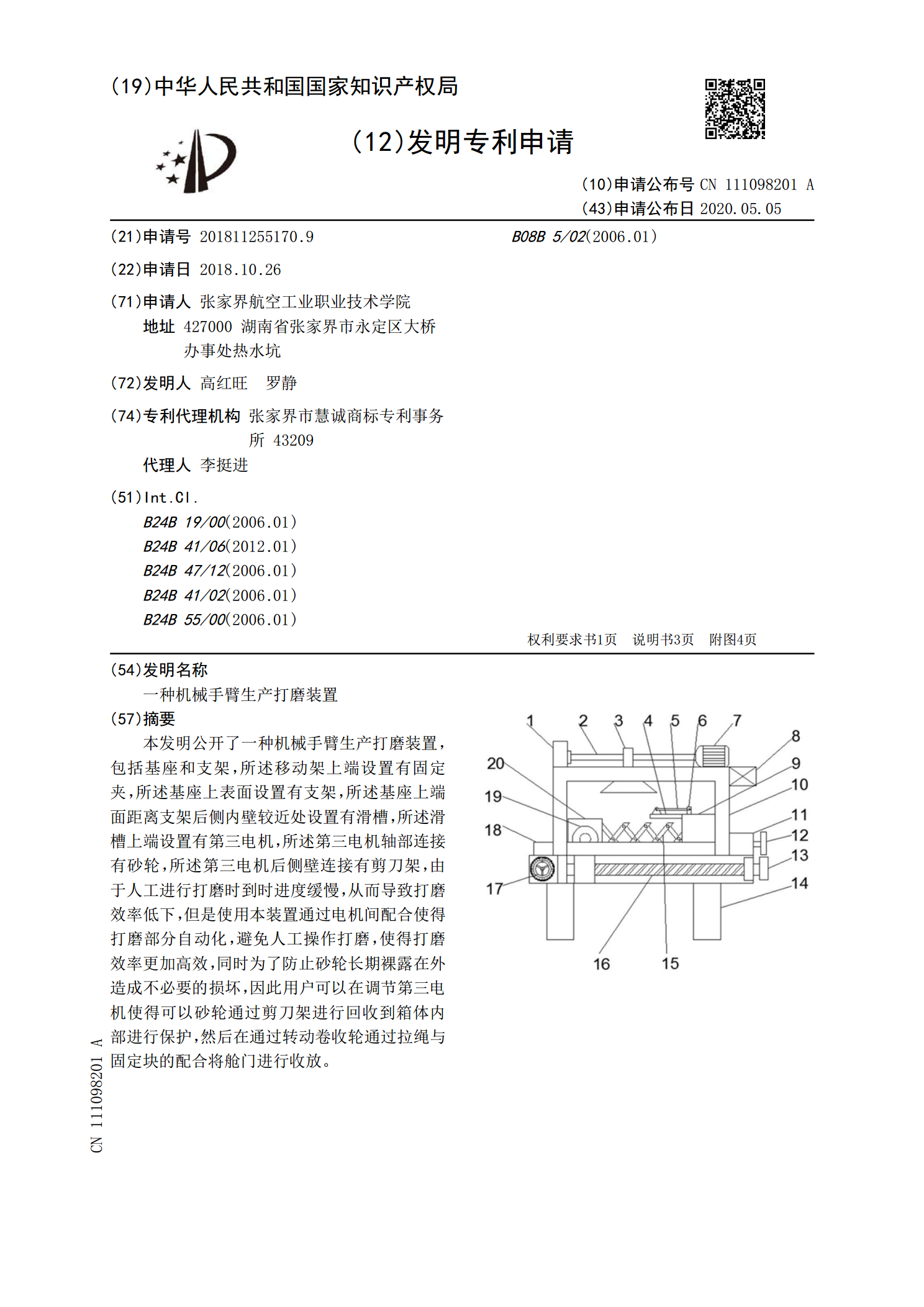
本发明公开了一种机械手臂生产打磨装置,包括基座和支架,所述移动架上端设置有固定夹,所述基座上表面设置有支架,所述基座上端面距离支架后侧内壁较近处设置有滑槽,所述滑槽上端设置有第三电机,所述第三电机轴部连接有砂轮,所述第三电机后侧壁连接有剪刀架,由于人工进行打磨时到时进度缓慢,从而导致打磨效率低下,但是使用本装置通过电机间配合使得打磨部分自动化,避免人工操作打磨,使得打磨效率更加高效,同时为了防止砂轮长期裸露在外造成不必要的损坏,因此用户可以在调节第三电机使得可以砂轮通过剪刀架进行回收到箱体内部进行保护,然

一种机械自动打磨装置.pdf
本发明涉及机械加工技术领域,且公开了一种机械自动打磨装置,包括机台和移动块,所述机台上部之间水平固定连接有限位杆,所述移动块下部水平开设有限位杆适配贯穿的限位孔,所述移动块上部水平开设有螺纹孔,所述机台上部左右两侧均水平对齐嵌入有第二轴承,位于所述机台上部右侧固定安装有正反电机。该机械自动打磨装置,通过当打磨盘与钢板上表面接触时,可以保证其打磨效果,并且圈管喷淋出来的水源对打磨盘进行冷却和避免碎屑的产生,解决传统技术打磨容易产生扬尘的问题。

一种自动搅拌机械手臂装置.pdf
本发明涉及搅拌设备的配件,具体公开了一种自动搅拌机械手臂装置,包括与包装桶相应的盖体,盖体的中部旋转设有旋转阶梯杆,盖体顶部设有与旋转阶梯杆轴向相连的第一电机;旋转阶梯杆的底部固定有滑移支架,滑移支架的顶部滑动设有滑移平台,滑移平台的中部设有第三电机,滑移平台的底部设有支持架,支持架上旋转设有与第三电机的工作杆轴向相连的丝杆,支持架上滑动设有套接在丝杆上的第四电机,第四电机的工作杆上设有搅拌杆,搅拌杆上设有L形挂壁杆;盖体的顶部设有第一通孔,盖体的侧部设有第二通孔,减少了搅拌死角,提高了混匀效果的均匀性,
一种机械配件自动打磨装置.pdf
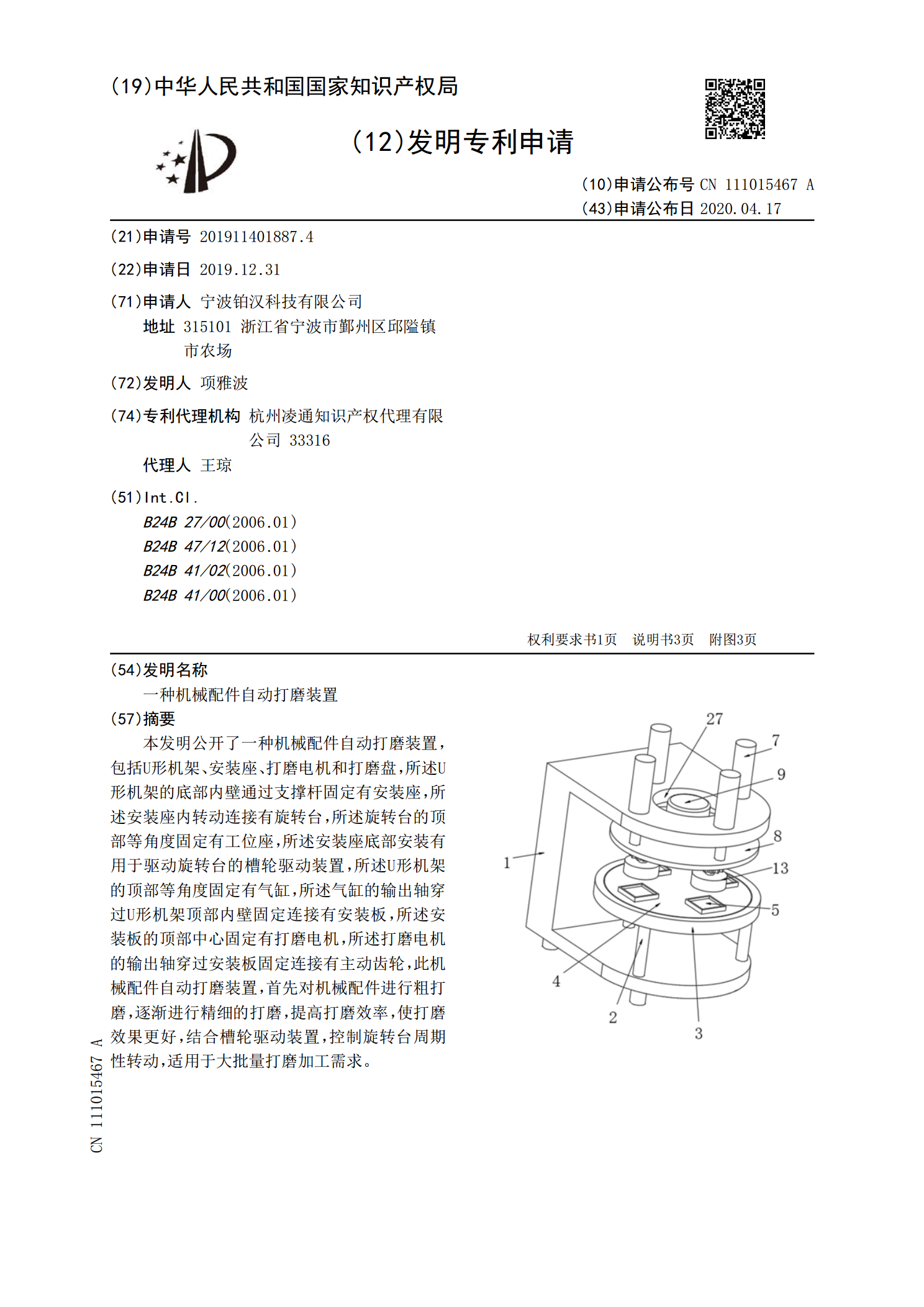
本发明公开了一种机械配件自动打磨装置,包括U形机架、安装座、打磨电机和打磨盘,所述U形机架的底部内壁通过支撑杆固定有安装座,所述安装座内转动连接有旋转台,所述旋转台的顶部等角度固定有工位座,所述安装座底部安装有用于驱动旋转台的槽轮驱动装置,所述U形机架的顶部等角度固定有气缸,所述气缸的输出轴穿过U形机架顶部内壁固定连接有安装板,所述安装板的顶部中心固定有打磨电机,所述打磨电机的输出轴穿过安装板固定连接有主动齿轮,此机械配件自动打磨装置,首先对机械配件进行粗打磨,逐渐进行精细的打磨,提高打磨效率,使打磨效果