
一种点云数据快速处理方法及装置.pdf

玉怡****文档


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种点云数据快速处理方法及装置.pdf
本申请公开了一种点云数据快速处理方法,包含以下步骤:在显示平面上获得第一点云集合向像素位置的映射,生成显示像素的集合,使每一个显示像素对应点云中至少一个点;计算点云中点的视觉坐标,当多个点映射在同一个像素时,保留深度最小的点的视觉坐标,进而生成与全部显示像素相对应的第二点云集合的数据集,包含第二点云集合的各点视觉坐标。响应于GUI中显示位置的信息,根据该位置的像素对应的第二点云集合中点的视觉坐标计算该点的空间坐标,根据所述空间坐标在第一点云集合中搜索出该点。本申请还包含用于实现所述方法的装置。本申请的方法
一种点云数据的处理方法及装置和点云渲染方法及装置.pdf
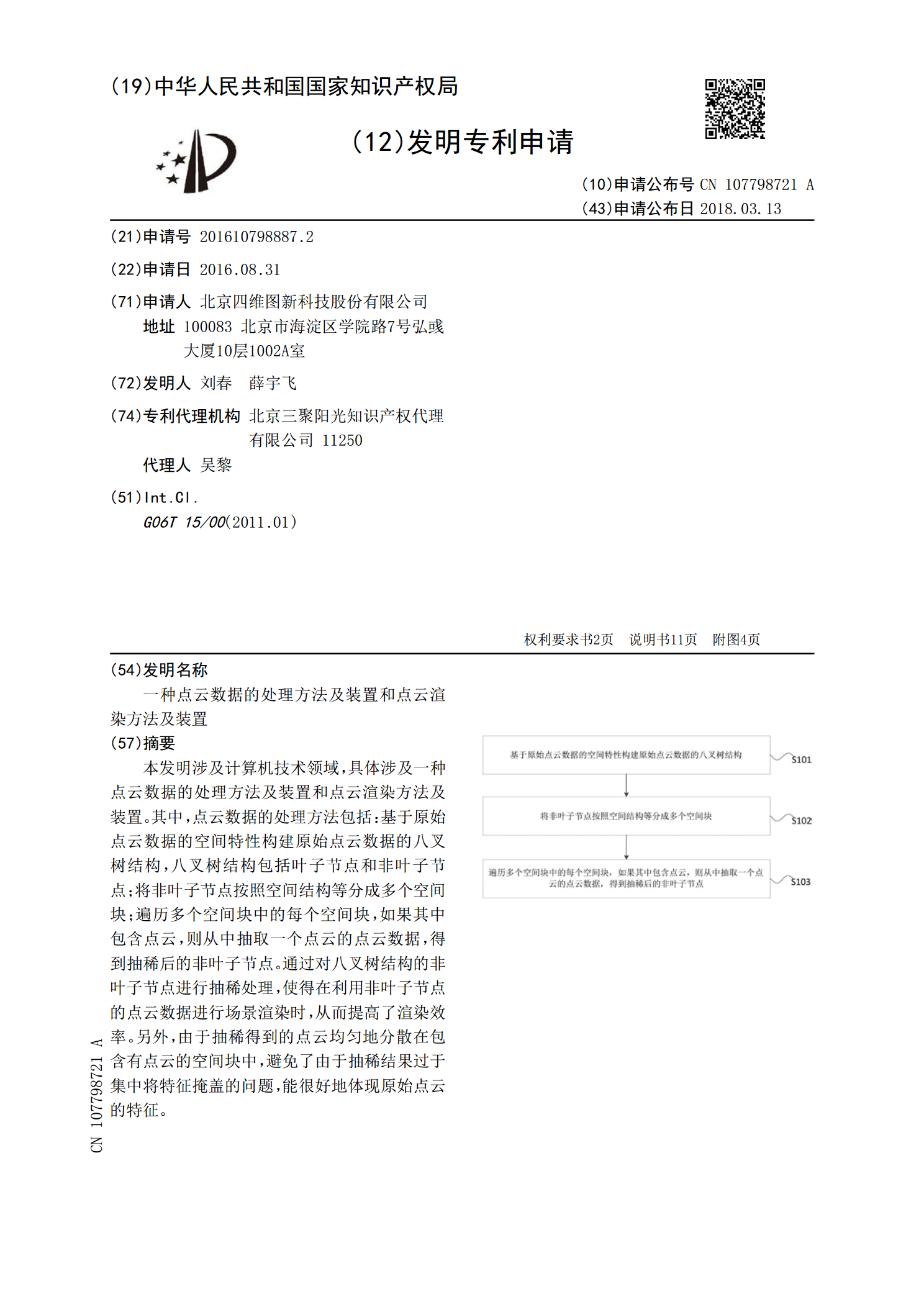
本发明涉及计算机技术领域,具体涉及一种点云数据的处理方法及装置和点云渲染方法及装置。其中,点云数据的处理方法包括:基于原始点云数据的空间特性构建原始点云数据的八叉树结构,八叉树结构包括叶子节点和非叶子节点;将非叶子节点按照空间结构等分成多个空间块;遍历多个空间块中的每个空间块,如果其中包含点云,则从中抽取一个点云的点云数据,得到抽稀后的非叶子节点。通过对八叉树结构的非叶子节点进行抽稀处理,使得在利用非叶子节点的点云数据进行场景渲染时,从而提高了渲染效率。另外,由于抽稀得到的点云均匀地分散在包含有点云的空间
一种点云数据处理方法及装置.pdf
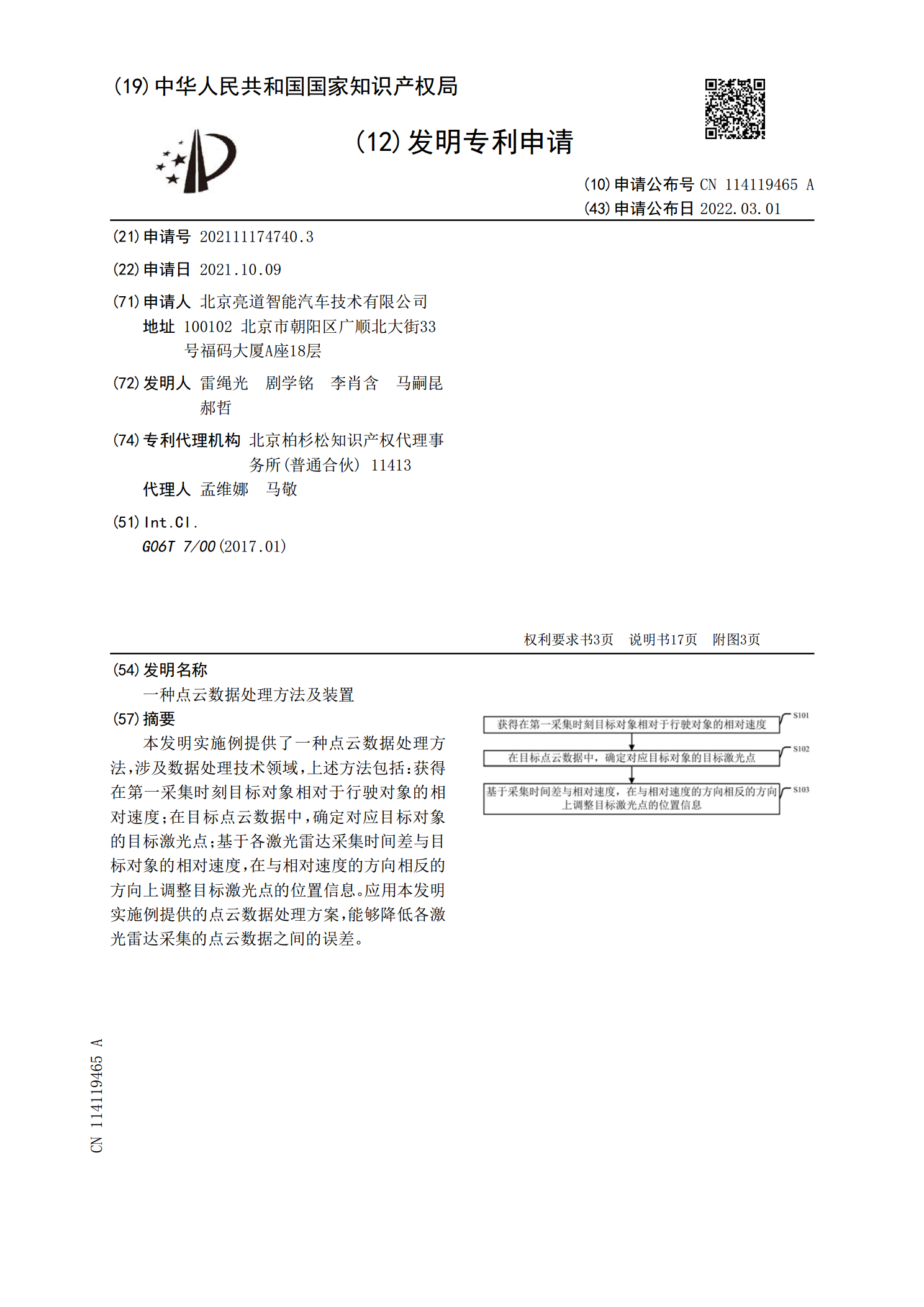
本发明实施例提供了一种点云数据处理方法,涉及数据处理技术领域,上述方法包括:获得在第一采集时刻目标对象相对于行驶对象的相对速度;在目标点云数据中,确定对应目标对象的目标激光点;基于各激光雷达采集时间差与目标对象的相对速度,在与相对速度的方向相反的方向上调整目标激光点的位置信息。应用本发明实施例提供的点云数据处理方案,能够降低各激光雷达采集的点云数据之间的误差。

一种点云数据处理方法及装置.pdf
本公开提供了一种点云数据处理方法及装置,包括:获取雷达装置在目标场景下扫描得到的待处理点云数据;根据所述目标场景对应的有效感知范围信息,从所述待处理点云数据中筛选出目标点云数据;对所述目标点云数据进行检测,得到检测结果。
一种处理点云数据的方法和装置.pdf
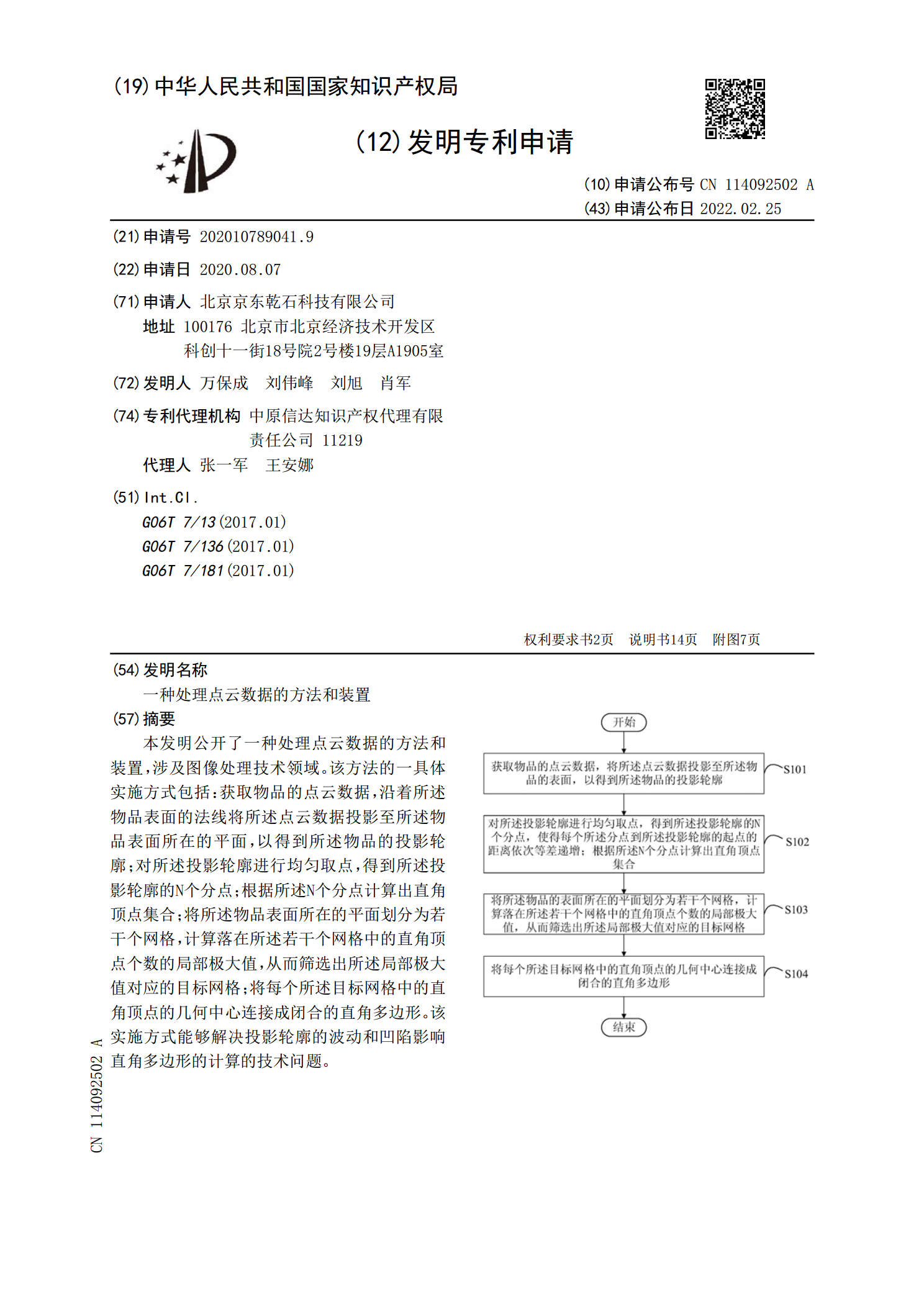
本发明公开了一种处理点云数据的方法和装置,涉及图像处理技术领域。该方法的一具体实施方式包括:获取物品的点云数据,沿着所述物品表面的法线将所述点云数据投影至所述物品表面所在的平面,以得到所述物品的投影轮廓;对所述投影轮廓进行均匀取点,得到所述投影轮廓的N个分点;根据所述N个分点计算出直角顶点集合;将所述物品表面所在的平面划分为若干个网格,计算落在所述若干个网格中的直角顶点个数的局部极大值,从而筛选出所述局部极大值对应的目标网格;将每个所述目标网格中的直角顶点的几何中心连接成闭合的直角多边形。该实施方式能够解