
基于荧光散斑的平面镜反射变换标定方法.pdf

元容****少女


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于荧光散斑的平面镜反射变换标定方法.pdf
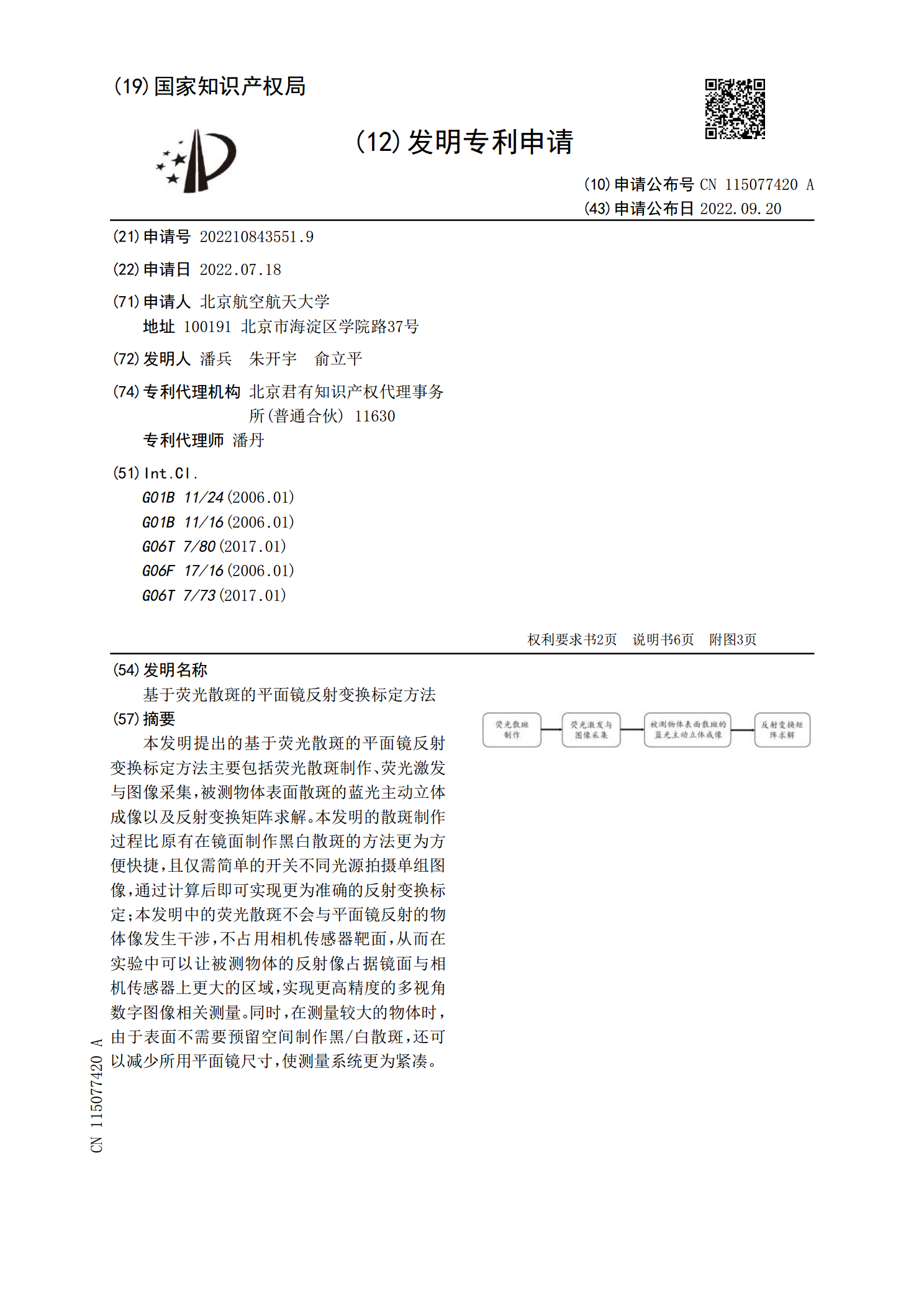
本发明提出的基于荧光散斑的平面镜反射变换标定方法主要包括荧光散斑制作、荧光激发与图像采集,被测物体表面散斑的蓝光主动立体成像以及反射变换矩阵求解。本发明的散斑制作过程比原有在镜面制作黑白散斑的方法更为方便快捷,且仅需简单的开关不同光源拍摄单组图像,通过计算后即可实现更为准确的反射变换标定;本发明中的荧光散斑不会与平面镜反射的物体像发生干涉,不占用相机传感器靶面,从而在实验中可以让被测物体的反射像占据镜面与相机传感器上更大的区域,实现更高精度的多视角数字图像相关测量。同时,在测量较大的物体时,由于表面不需要

散斑标定方法、装置和设备.pdf
本申请涉及一种散斑标定方法、装置和设备,该方法包括:获取相机对标定板拍摄得到的散斑图像;其中,散斑图像为激光光源投影至标定板后,相机对标定板进行拍摄得到;根据散斑图像计算得到散斑对应的计算标定数据;根据计算标定数据和预设的修正数据,计算得到实际标定数据;其中,修正数据为根据对标定板采集得到的实测数据,与根据对标定板拍摄的图像计算的标定数据的对应关系计算得到。根据修正数据对计算标定数据进行修正,得到实际标定数据,完成对激光光源的散斑标定,能够减少因平面照度与散斑强度存在的差异对散斑标定的影响,提高了标定准确

基于平稳小波变换和Canny算子去除医学散斑噪声的方法.pdf
本发明公开了基于平稳小波变换和Canny算子去除医学散斑噪声的方法,属于医学图像技术领域。本发明将Canny边缘检测技术应用于低频子带来调整强边缘附近的去噪策略。采用自适应邻域收缩算法对平稳小波变换分解后的图像的高频子带小波系数进行阈值分割。巧妙的把边缘检测和自适应邻域收缩相结合,有效地保留了边缘,消除了噪音。将该方法与常用的综合散斑图像和临床超声图像去噪方法进行了比较。实验结果表明,在大多数情况下,我们提出的方法在峰值信噪比、边缘保持因子和二维互相关等方面比比较器的算法有更好的性能,并且在较高的噪声水平
基于温敏荧光散斑及DIC测量技术的热膨胀实时测量方法.pdf
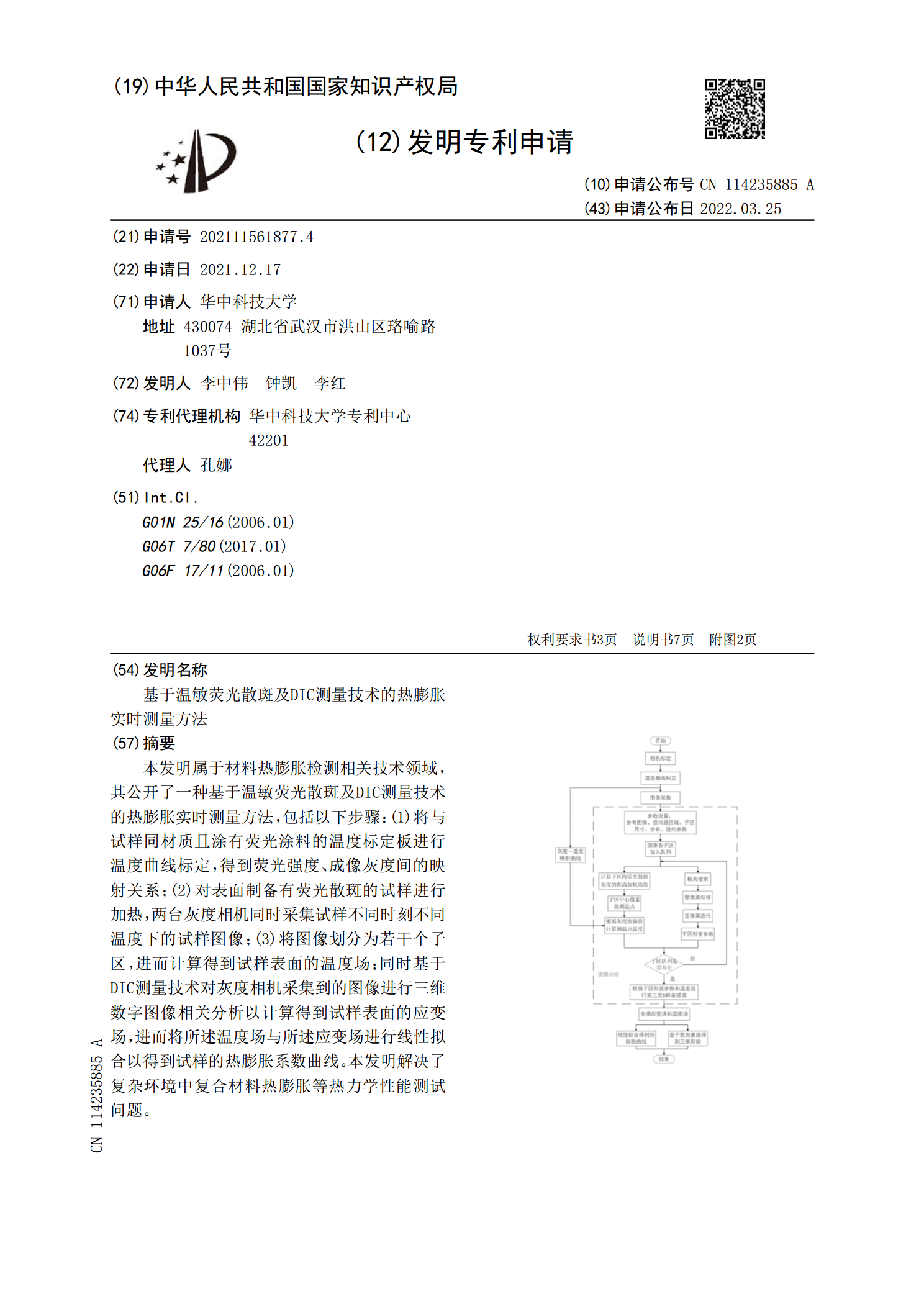
本发明属于材料热膨胀检测相关技术领域,其公开了一种基于温敏荧光散斑及DIC测量技术的热膨胀实时测量方法,包括以下步骤:(1)将与试样同材质且涂有荧光涂料的温度标定板进行温度曲线标定,得到荧光强度、成像灰度间的映射关系;(2)对表面制备有荧光散斑的试样进行加热,两台灰度相机同时采集试样不同时刻不同温度下的试样图像;(3)将图像划分为若干个子区,进而计算得到试样表面的温度场;同时基于DIC测量技术对灰度相机采集到的图像进行三维数字图像相关分析以计算得到试样表面的应变场,进而将所述温度场与所述应变场进行线性拟合

基于平面镜的相机标定方法研究的开题报告.docx
基于平面镜的相机标定方法研究的开题报告一、选题背景和意义相机标定是相机视觉领域的重要技术之一,它为3D物体的视觉重建、虚拟现实、机器人视觉、自动驾驶、医学成像等领域奠定了基础。而基于平面镜的相机标定方法是一种相对简单且经济实惠的相机标定方法,因此受到越来越多的关注。二、研究内容本研究旨在探究基于平面镜的相机标定方法,主要研究内容包括以下几个方面:1.基于平面镜的相机标定原理及相关理论研究。2.基于平面镜的相机标定的实验平台设计与实现。3.分析和评估不同标定参数对标定结果的影响,确定最佳的标定参数。4.设计