
基于置信框架的自适应ISAR成像方法.pdf

是你****枝呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于置信框架的自适应ISAR成像方法.pdf
本发明公开了一种基于置信框架的自适应ISAR成像方法,主要解决现有成像方法不能自适应得到目标距离-多普勒ISAR图像问题。其实现过程是:(1)对雷达回波进行运动补偿,得到ISAR回波矢量;(2)利用ISAR回波矢量为多分量单频信号特性,得到成像字典Φ;(3)根据ISAR回波矢量和成像字典Φ,利用梯度法求解ISAR的矢量信号w;(4)根据ISAR的矢量信号w,利用置信框架方法求解正则化参数λ和噪声功率β;(5)利用得到的正则化参数λ和噪声功率β,求解精确的ISAR信号矢量w';(6)将N个距离单元精确的IS

自适应Chirplet分解的ISAR成像方法.docx
自适应Chirplet分解的ISAR成像方法自适应Chirplet分解的ISAR成像方法随着雷达技术的不断发展,ISAR(InverseSyntheticApertureRadar)成像技术已被广泛应用于目标识别、目标测距、目标定位等领域。ISAR成像技术是一种通过雷达发射控制信号,利用其与目标交互后返回的信号进行复杂信号处理并重构目标的高分辨率二维图像的技术。ISAR成像方法目前主要采用经典的FFT与滞后调制算法,但此类算法在处理目标具有多种运动状态或姿态的情况下往往面临着数据密度低、清晰度低等问题。因

基于ISAR成像的组网雷达带宽自适应调度算法.docx
基于ISAR成像的组网雷达带宽自适应调度算法随着雷达技术不断发展,组网雷达技术也随之得到了广泛的应用。组网雷达可以通过多个雷达节点协同工作,提高雷达系统的覆盖范围和检测性能。基于ISAR成像的组网雷达技术可以通过合理的数据处理和算法优化,实现高效的目标成像和跟踪。本文将重点介绍基于ISAR成像的组网雷达带宽自适应调度算法。一、ISAR成像技术ISAR成像是一种通过对目标进行连续的旋转和接收信号处理后来构建目标成像的技术。ISAR相对于传统的雷达成像技术具有高精度、高分辨率等优点。可以应用于海洋、空间、陆地

基于稀疏孔径ISAR成像的雷达资源自适应调度算法.docx
基于稀疏孔径ISAR成像的雷达资源自适应调度算法基于稀疏孔径ISAR成像的雷达资源自适应调度算法摘要:稀疏孔径逆合成孔径雷达(ISAR)成像是利用目标的自身运动实现高分辨率成像的一种有效方法。然而,ISAR成像需要高质量的雷达资源调度,以获取清晰准确的成像结果。本文提出了一种基于稀疏孔径ISAR成像的雷达资源自适应调度算法,通过优化雷达任务的时间分配和参数设置,实现最佳的成像效果。算法的有效性通过实验结果验证。1.引言逆合成孔径雷达(ISAR)成像技术在目标识别与定位领域中具有重要应用。ISAR利用目标的
基于增强矩阵补全的ISAR稀疏成像方法.pdf
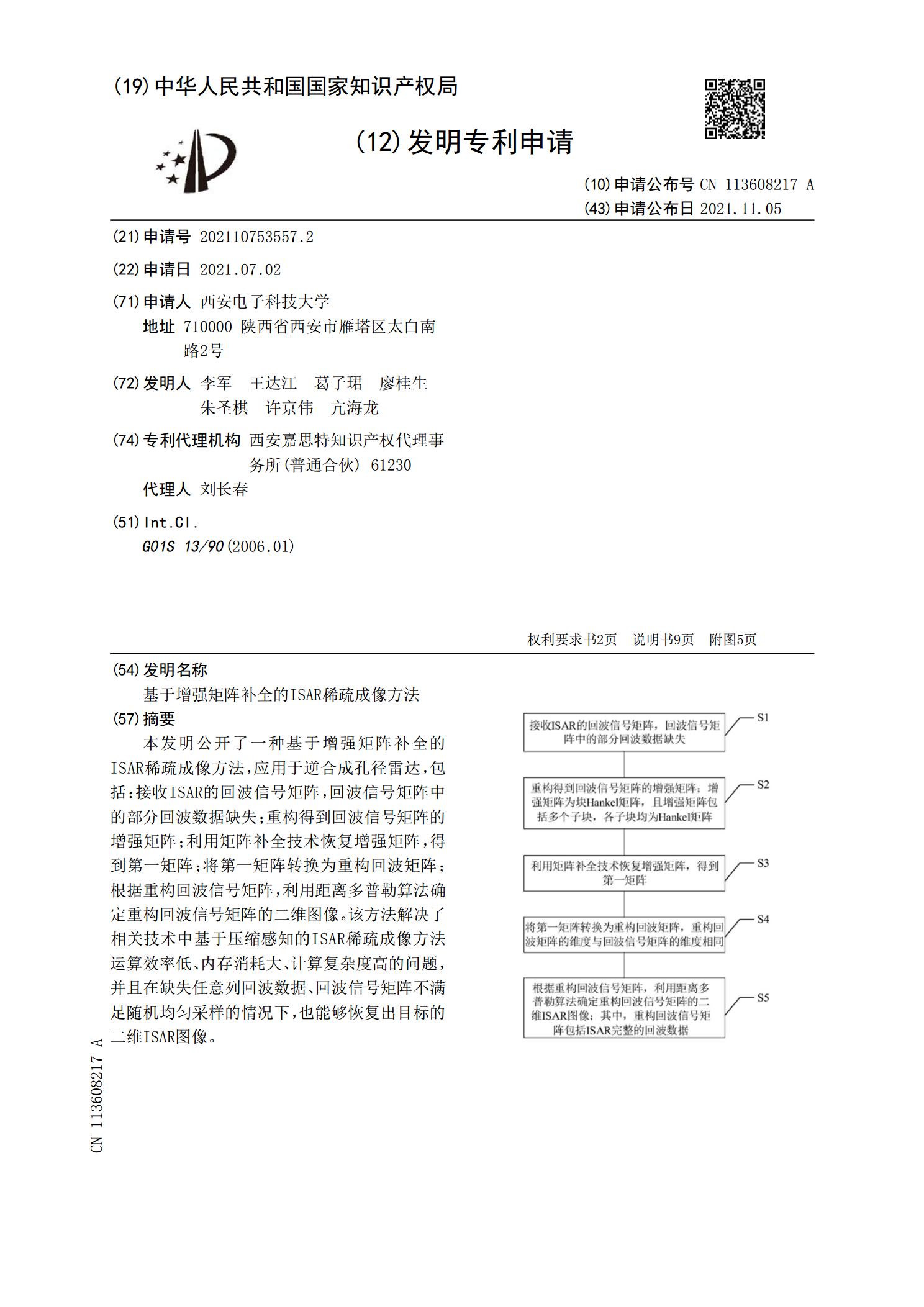
本发明公开了一种基于增强矩阵补全的ISAR稀疏成像方法,应用于逆合成孔径雷达,包括:接收ISAR的回波信号矩阵,回波信号矩阵中的部分回波数据缺失;重构得到回波信号矩阵的增强矩阵;利用矩阵补全技术恢复增强矩阵,得到第一矩阵;将第一矩阵转换为重构回波矩阵;根据重构回波信号矩阵,利用距离多普勒算法确定重构回波信号矩阵的二维图像。该方法解决了相关技术中基于压缩感知的ISAR稀疏成像方法运算效率低、内存消耗大、计算复杂度高的问题,并且在缺失任意列回波数据、回波信号矩阵不满足随机均匀采样的情况下,也能够恢复出目标的二