
一种基于简化的惯性测量组件的车载组合导航方法.pdf

羽沫****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于简化的惯性测量组件的车载组合导航方法.pdf
本发明公开了一种基于简化的惯性测量组件的车载组合导航方法,包括以下步骤:步骤1:采用简化的惯性测量组件测量汽车运行位置的数据,并通过地形预测器方法获取由地面倾斜度引起的车辆纵横摇角;步骤2:根据步骤1所测量的数据通过SINS辅助CPS判断可见的卫星并选择合适的卫星;步骤3:从步骤2中选定和捕获跟踪的卫星上可以获得伪距、多普勒频率、载波相位和导航电文等信息,利用SINS/GPS紧组合导航滤波器依据惯导辅助方法对GPS环路进行闭环控制,辅助GPS接收机;步骤4:采用GPS跟踪复合结构的超紧组合算法,根据系统精

基于车轮安装惯性测量单元的车载组合导航.docx
基于车轮安装惯性测量单元的车载组合导航基于车轮安装惯性测量单元的车载组合导航摘要:车载组合导航是一种利用车辆上的多种传感器数据进行导航定位的技术。本文介绍了一种基于车轮安装惯性测量单元的车载组合导航算法。该算法通过获取车轮转速和车身加速度信息,并结合惯性测量单元数据,实现了高精度的车辆定位。实验结果表明,本文所提出的算法具有较好的定位精度和鲁棒性。关键词:车载组合导航;惯性测量单元;车轮转速;车身加速度;定位精度1.引言车载组合导航是一种通过整合多种传感器数据,包括全球卫星导航系统(GNSS)、惯性测量单

一种基于MEMS惯性测量系统的组合导航方法.pdf
本发明为一种基于MEMS惯性测量系统的组合导航方法。包括如下步骤:(1):数据采集;(2)对准、修正平台误差角:采用组合导航系统的芯片对导弹进行对准,根据卫星信息对平台误差角进行修正;(3)数据处理、组合导航:用MEMS惯性测量系统的位置误差、速度误差以及姿态误差作为组合导航系统的状态变量;将MEMS惯性测量系统输出的与卫星导航系统和磁传感器输出的位置差值、速度差值以及姿态差值作为系统的量测量;通过磁传感器和卫星实现对MEMS惯性测量系统数据的粗对准、精对准及修正INS导航结果,最后输出导航结果。本发明提

基于惯性导航与无线测距组合的车载定位方案.docx
基于惯性导航与无线测距组合的车载定位方案一、引言车载定位技术是为了满足交通运输、智慧城市等领域发展而面临的一项关键技术挑战之一。这种技术是为了实现车辆准确且实时地确定其在地球表面的位置而开发的。车载定位技术的主要应用领域包括地图导航、车辆安全、自动驾驶及紧急救援等领域。目前,车载定位技术有许多的应用方案,例如基于全球定位系统(GPS)、可视化定位系统(VSL)等等。但是,由于车载环境复杂、信号传输不稳定等因素,这些定位技术的精度和可靠性存在较大的难度。因此,科研工作者不断尝试不同的车载定位技术方案,以提高
一种惯性导航测量组件.pdf
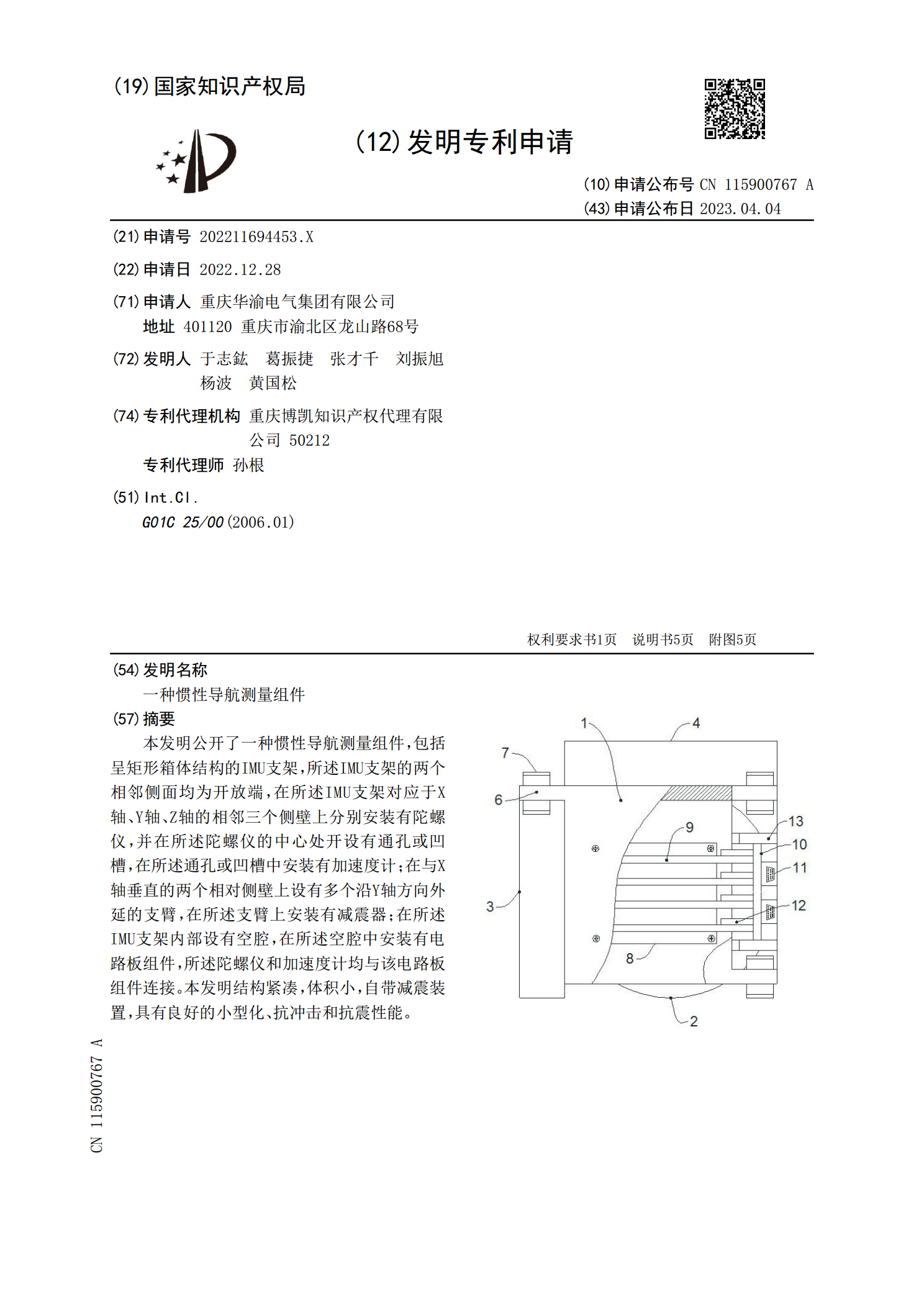
本发明公开了一种惯性导航测量组件,包括呈矩形箱体结构的IMU支架,所述IMU支架的两个相邻侧面均为开放端,在所述IMU支架对应于X轴、Y轴、Z轴的相邻三个侧壁上分别安装有陀螺仪,并在所述陀螺仪的中心处开设有通孔或凹槽,在所述通孔或凹槽中安装有加速度计;在与X轴垂直的两个相对侧壁上设有多个沿Y轴方向外延的支臂,在所述支臂上安装有减震器;在所述IMU支架内部设有空腔,在所述空腔中安装有电路板组件,所述陀螺仪和加速度计均与该电路板组件连接。本发明结构紧凑,体积小,自带减震装置,具有良好的小型化、抗冲击和抗震性能