
用于将工件多轴地运输通过加工机床的连续的加工工位的驱动装置.pdf

书生****写意

1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于将工件多轴地运输通过加工机床的连续的加工工位的驱动装置.pdf
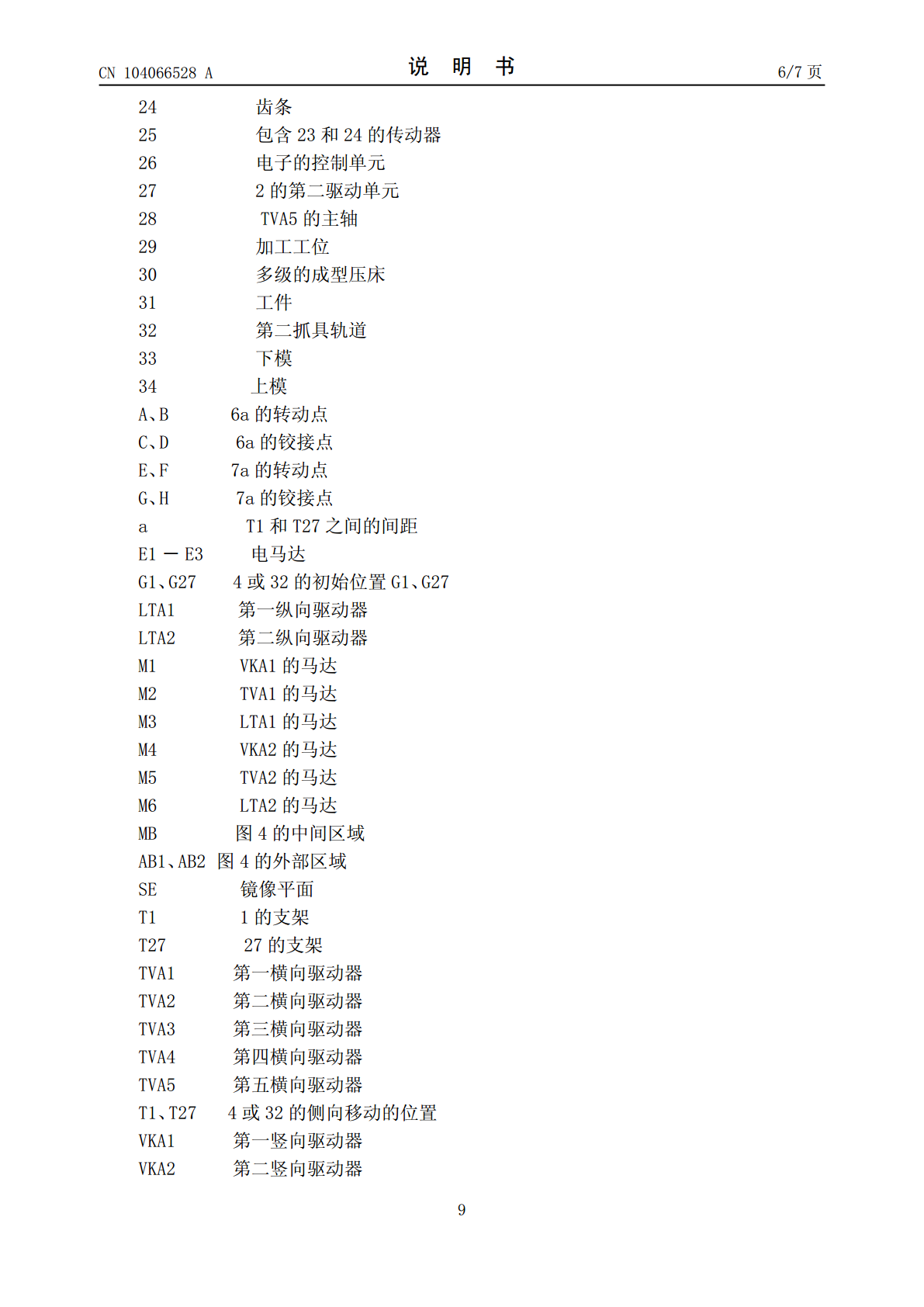
本发明涉及一种驱动装置(2),其用于将工件(31)多轴地运输通过加工机床尤其多级的成型压床(30)的连续的加工工位(29),其中,驱动装置(2)包括两个抓具轨道(4,32),其中,两个抓具轨道(4,32)可通过与第一抓具轨道(4)相关联的第一横向驱动器(TAV1)和与第二抓具轨道(32)相关联的第二横向驱动器(TAV2)彼此独立地横向移动以用于执行关闭运动。在此,抓具轨道(4,32)可彼此独立地竖向移动以用于执行升降运动和/或抓具轨道(4,32)可彼此独立地纵向移动以用于执行运输运动。
用于轴承内圈复合加工的多工位连续作业装置.pdf
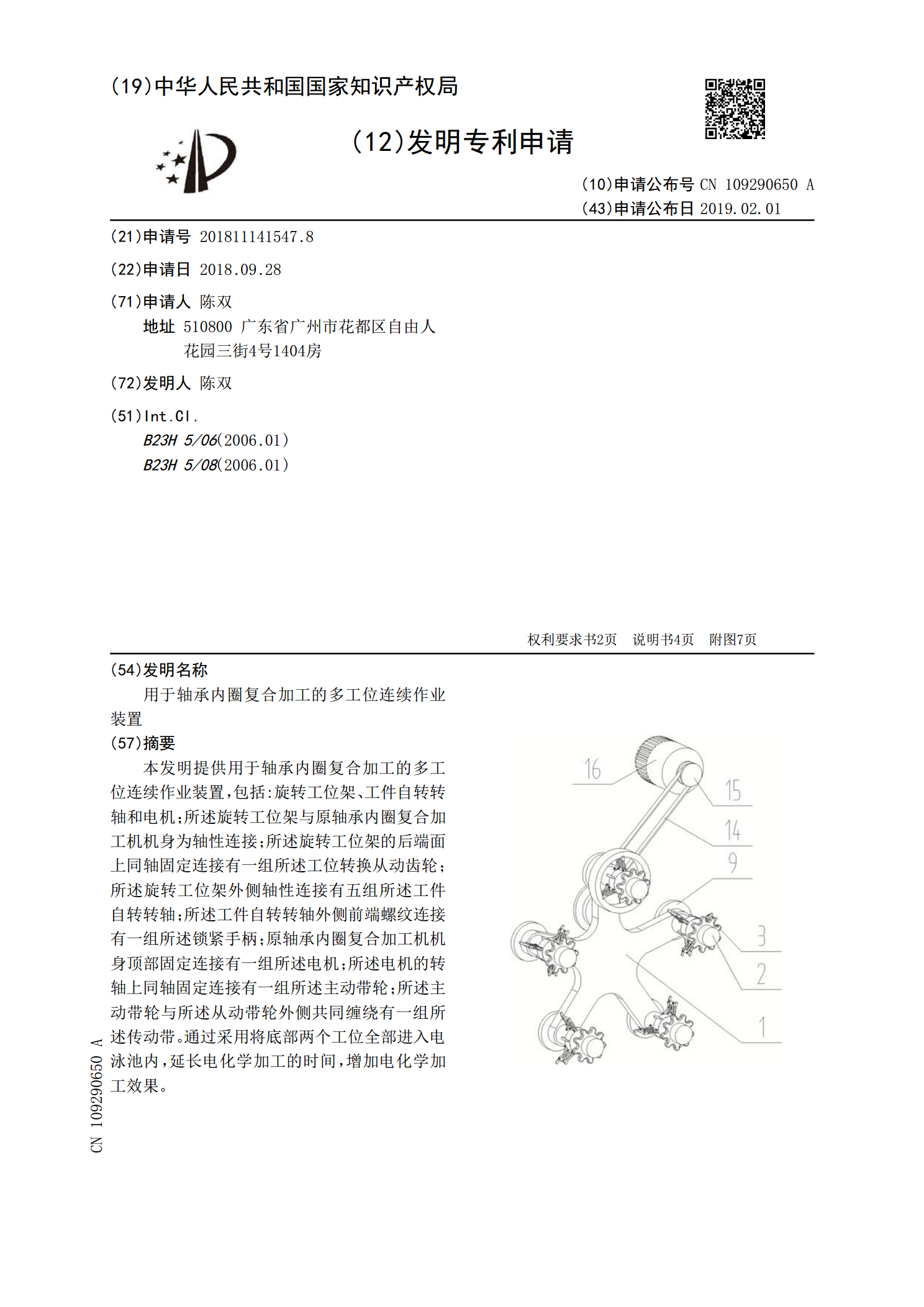
本发明提供用于轴承内圈复合加工的多工位连续作业装置,包括:旋转工位架、工件自转转轴和电机;所述旋转工位架与原轴承内圈复合加工机机身为轴性连接;所述旋转工位架的后端面上同轴固定连接有一组所述工位转换从动齿轮;所述旋转工位架外侧轴性连接有五组所述工件自转转轴;所述工件自转转轴外侧前端螺纹连接有一组所述锁紧手柄;原轴承内圈复合加工机机身顶部固定连接有一组所述电机;所述电机的转轴上同轴固定连接有一组所述主动带轮;所述主动带轮与所述从动带轮外侧共同缠绕有一组所述传动带。通过采用将底部两个工位全部进入电泳池内,延长电
用于加工工件的机床.pdf
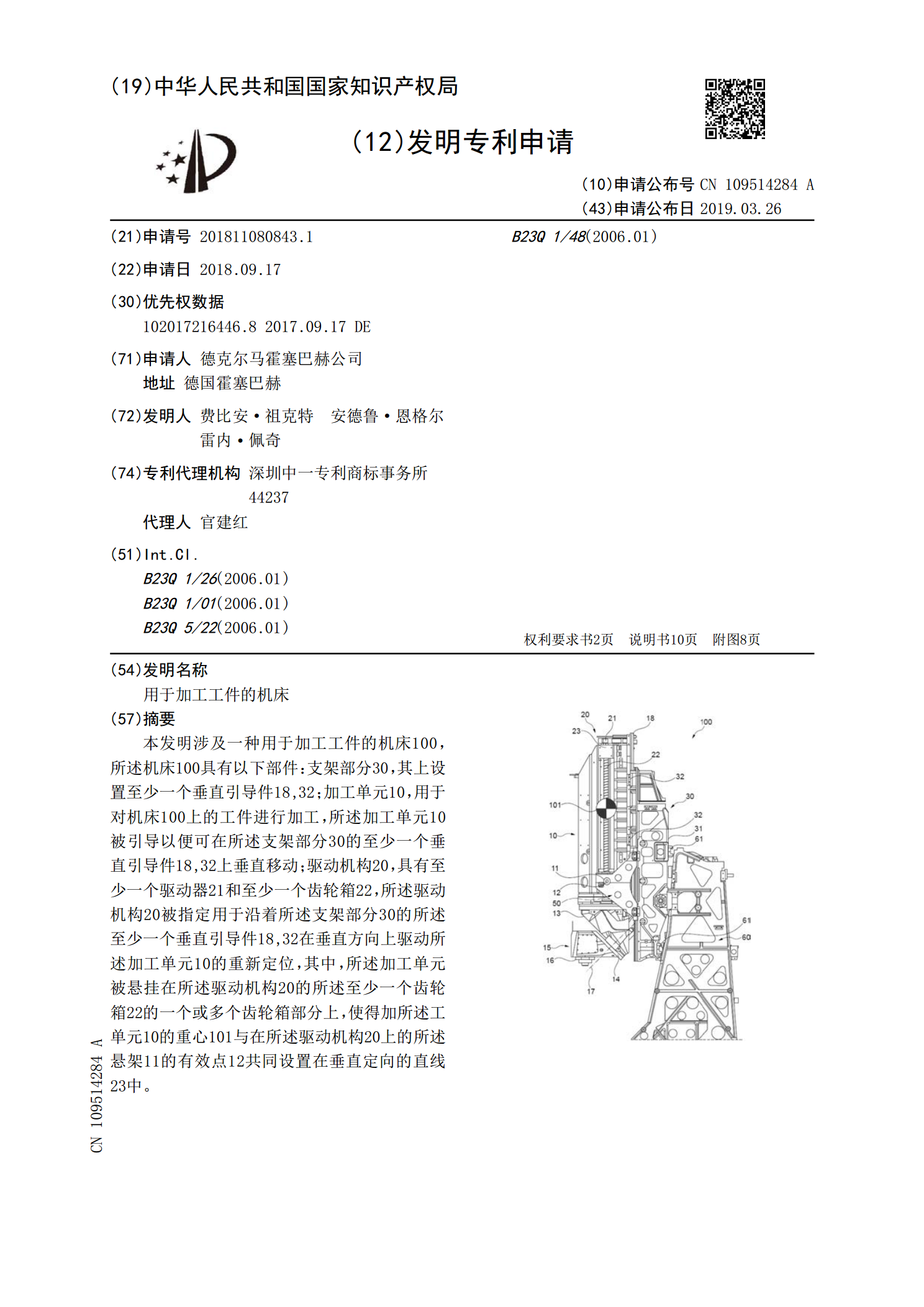
本发明涉及一种用于加工工件的机床100,所述机床100具有以下部件:支架部分30,其上设置至少一个垂直引导件18,32;加工单元10,用于对机床100上的工件进行加工,所述加工单元10被引导以便可在所述支架部分30的至少一个垂直引导件18,32上垂直移动;驱动机构20,具有至少一个驱动器21和至少一个齿轮箱22,所述驱动机构20被指定用于沿着所述支架部分30的所述至少一个垂直引导件18,32在垂直方向上驱动所述加工单元10的重新定位,其中,所述加工单元被悬挂在所述驱动机构20的所述至少一个齿轮箱22的一个

用于加工工件的加工机床和方法.pdf
用于加工基本上板状的工件(W)的一种加工机床(10)或一种方法,所述工件优选至少部段地由木材、人造板、复合材料或塑料构成,其中加工机床(10)具有:用于沿加工方向(R)加工工件(W)的加工设备(6);光学检测设备(2);评估单元和控制装置(4),其中:光学检测设备(2)设计为并且设置成,使得所述光学检测设备能够关于加工方向(6)光学地检测待加工的工件(W)的前部的和后部的端部部段(Q1,Q2),并且为评估单元提供相应的检测结果;评估单元设计为,使得所述评估单元基于检测结果判断,在待加工的工件(W)的前部的
四轴设备的多工位加工装置.pdf
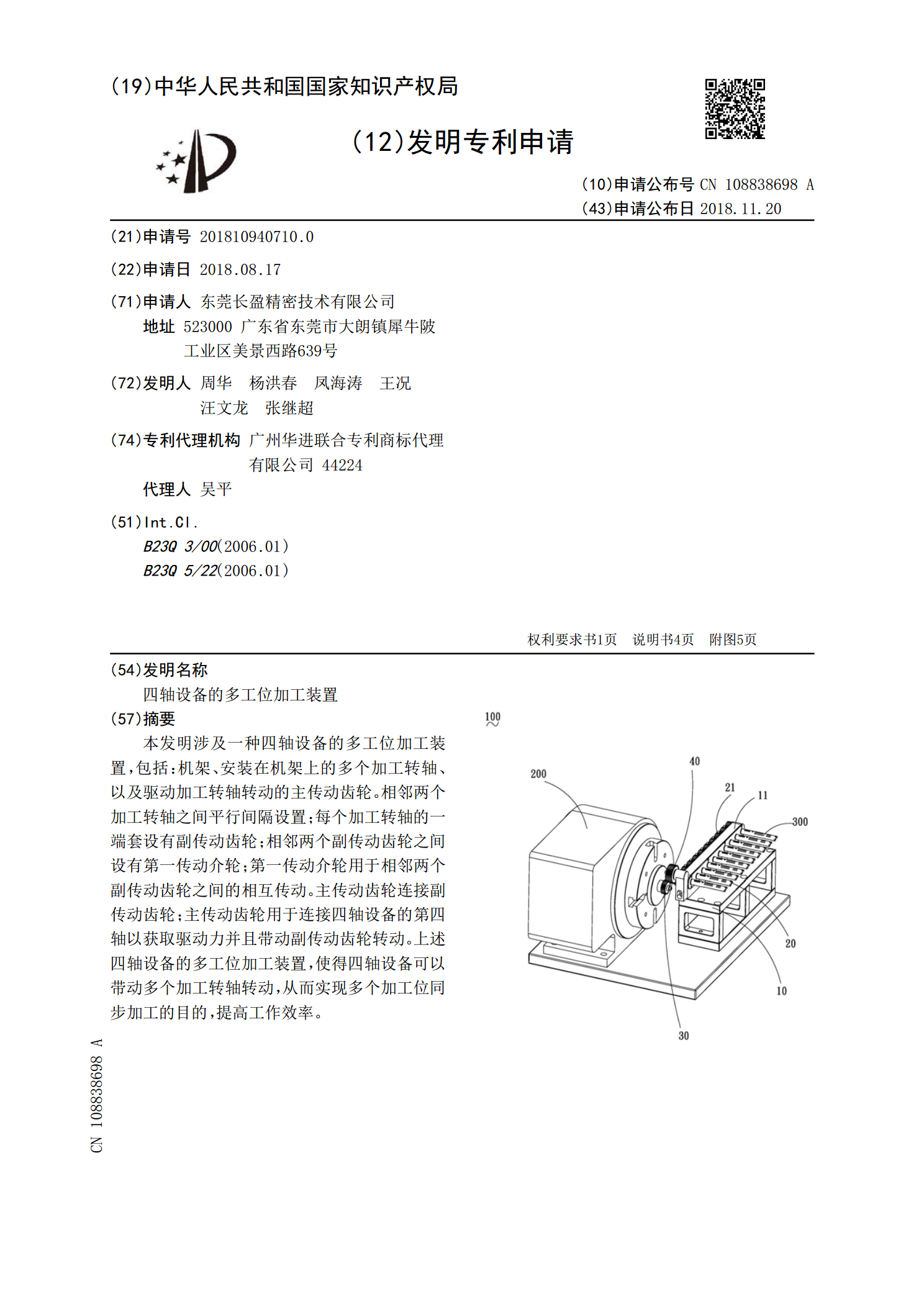
本发明涉及一种四轴设备的多工位加工装置,包括:机架、安装在机架上的多个加工转轴、以及驱动加工转轴转动的主传动齿轮。相邻两个加工转轴之间平行间隔设置;每个加工转轴的一端套设有副传动齿轮;相邻两个副传动齿轮之间设有第一传动介轮;第一传动介轮用于相邻两个副传动齿轮之间的相互传动。主传动齿轮连接副传动齿轮;主传动齿轮用于连接四轴设备的第四轴以获取驱动力并且带动副传动齿轮转动。上述四轴设备的多工位加工装置,使得四轴设备可以带动多个加工转轴转动,从而实现多个加工位同步加工的目的,提高工作效率。