
基于改进自适应滤波算法的高超目标导航信号跟踪方法.pdf

书生****写意


1/10
2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于改进自适应滤波算法的高超目标导航信号跟踪方法.pdf
本发明公开了一种基于改进自适应滤波算法的高超目标导航信号跟踪方法。高超声速目标接收到的GPS信号存在较大的多普勒频移,传统的基于锁相环跟踪环路无法进行跟踪,针对这一问题,采用改进的自适应卡尔曼滤波算法,通过实时递推的方法估计出每个时刻目标接收到GPS信号的多普勒频移和码相位偏移,然后将其用于GPS信号的解调、解扩,最终可以得到导航数据。再由导航数据计算出目标到卫星的伪距及卫星位置,便可以对目标位置进行解算。

基于自适应卡尔曼滤波的弱信号跟踪方法.pdf
本发明涉及卫星导航接收机中在微弱信号下的跟踪技术,提供了一种基于自适应卡尔曼滤波的弱信号跟踪方法。其包括以下步骤:S1、中频信号经过捕获阶段后进入到跟踪阶段;S2、将中频信号分别与正弦和余弦载波复制信号混频,分为I支路和Q支路;S3、混频后的信号与伪码相乘;S4、将解调后的信号均输入到积分清除器中,获取积分值;S5、将积分值输入到鉴相器中获取载波相位误差;S6、将载波相位误差作为测量值输入至基于自适应卡尔曼滤波器的跟踪环路中,获取载波相位误差,载波多普勒误差和载波多普勒变化率;S7、更新载波数控振荡器(N
一种基于改进的Sage-Husa自适应滤波的弱信号跟踪方法.pdf
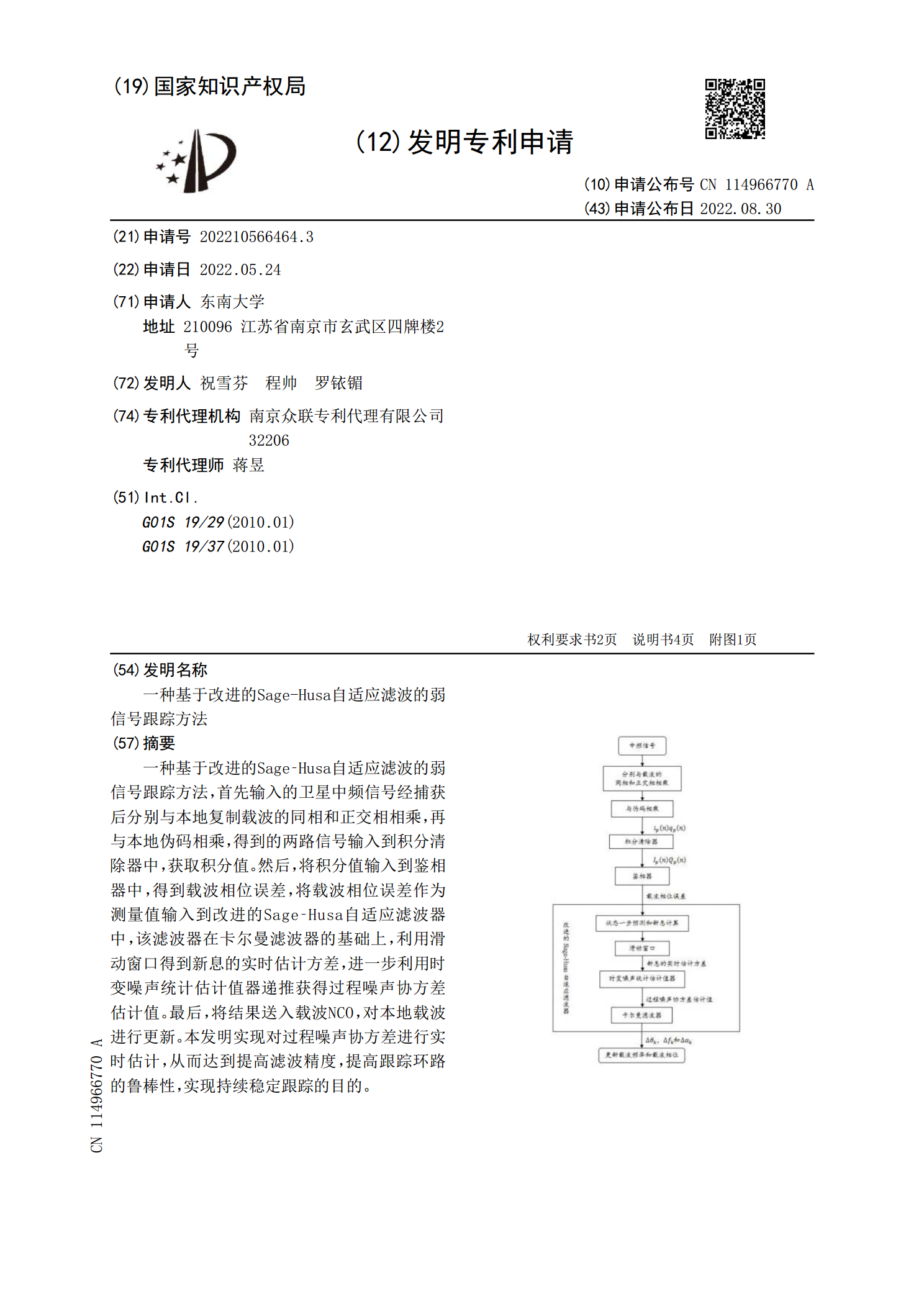
一种基于改进的Sage‑Husa自适应滤波的弱信号跟踪方法,首先输入的卫星中频信号经捕获后分别与本地复制载波的同相和正交相相乘,再与本地伪码相乘,得到的两路信号输入到积分清除器中,获取积分值。然后,将积分值输入到鉴相器中,得到载波相位误差,将载波相位误差作为测量值输入到改进的Sage‑Husa自适应滤波器中,该滤波器在卡尔曼滤波器的基础上,利用滑动窗口得到新息的实时估计方差,进一步利用时变噪声统计估计值器递推获得过程噪声协方差估计值。最后,将结果送入载波NCO,对本地载波进行更新。本发明实现对过程噪声协方

基于人类视觉机制的自适应粒子滤波目标跟踪算法的中期报告.docx
基于人类视觉机制的自适应粒子滤波目标跟踪算法的中期报告1.研究背景和意义目标跟踪技术是计算机视觉领域的一个研究热点,其将视频或图像序列中移动的目标快速、准确地追踪,并且具有广泛的应用领域,在军事、安保、交通、娱乐等领域中都有着重要的作用。其中,基于粒子滤波算法的目标跟踪方法因其适用性、灵活性和实时性等优点被广泛应用。然而,在复杂场景或目标运动过快的情况下,传统的基于粒子滤波的目标跟踪算法往往存在着跟踪漂移、跟踪失败等不足之处。因此,如何进一步提高粒子滤波算法的跟踪精度和鲁棒性是当前研究的重点之一。2.研究
一种基于改进自适应算法的科里奥利流量计信号跟踪方法.pdf
本发明涉及一种基于改进自适应算法的科里奥利流量计信号跟踪方法,解决现有信号跟踪方法难以长时间实时准确跟踪和测量信号频率的问题。本发明基于奇异谱分析方法和基于优化零极点配置滤波算法,通过对输入信号进行预处理,构建以为传递函数的滤波器,动态调整滤波器模型,使极点以变角度的方式趋近于零点。本发明能够实时、精确跟踪和测量传感器输出信号频率。本方法与传统方法相比在频率跟踪方面具有更好的收敛性和实时性,实现了在工业现场中对科里奥利流量计传感器信号进行长时间、高精度的跟踪。