
一种基于改进的Sage-Husa自适应滤波的弱信号跟踪方法.pdf

努力****采萍

1/8
2/8

3/8
4/8
5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于改进的Sage-Husa自适应滤波的弱信号跟踪方法.pdf
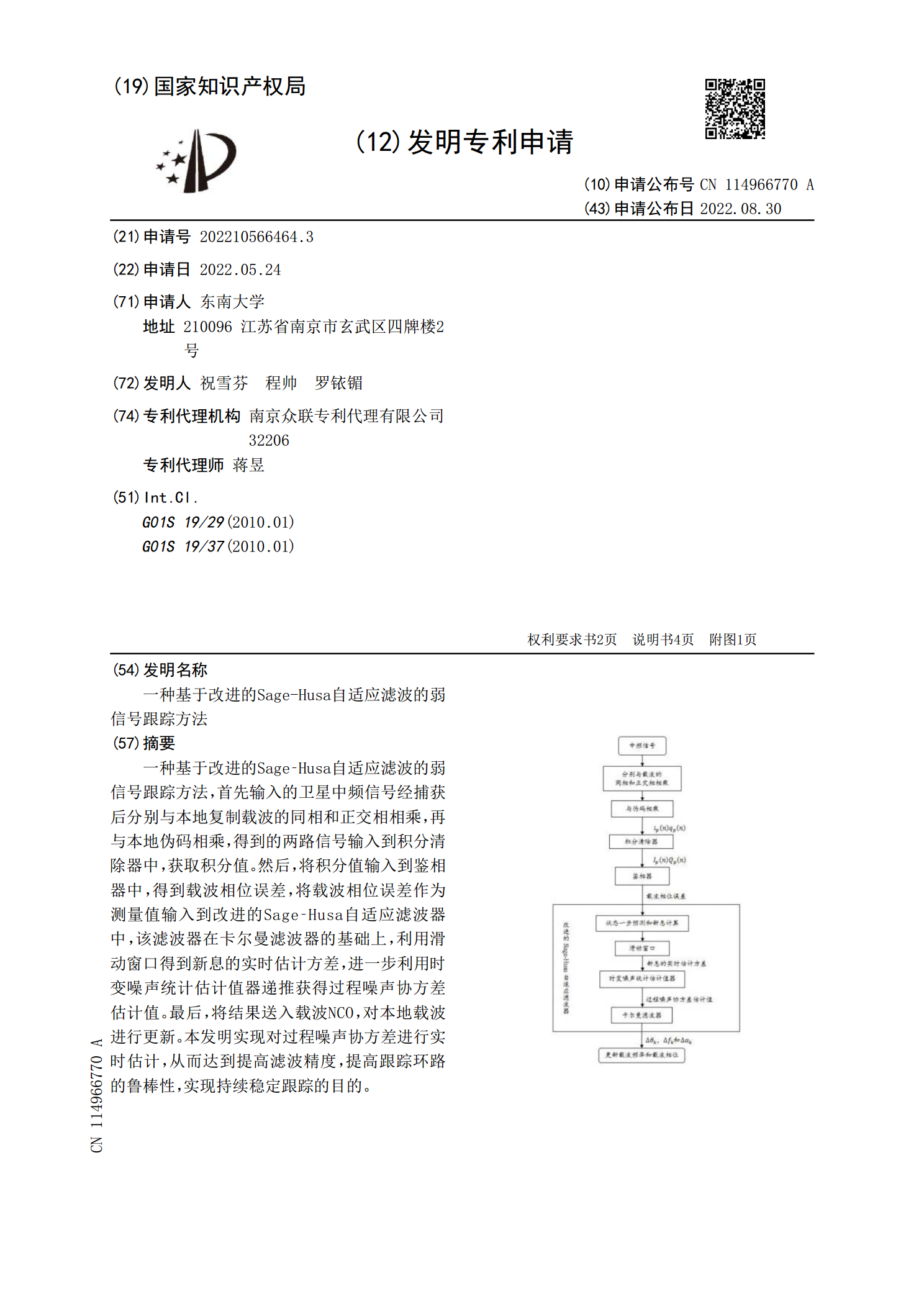
一种基于改进的Sage‑Husa自适应滤波的弱信号跟踪方法,首先输入的卫星中频信号经捕获后分别与本地复制载波的同相和正交相相乘,再与本地伪码相乘,得到的两路信号输入到积分清除器中,获取积分值。然后,将积分值输入到鉴相器中,得到载波相位误差,将载波相位误差作为测量值输入到改进的Sage‑Husa自适应滤波器中,该滤波器在卡尔曼滤波器的基础上,利用滑动窗口得到新息的实时估计方差,进一步利用时变噪声统计估计值器递推获得过程噪声协方差估计值。最后,将结果送入载波NCO,对本地载波进行更新。本发明实现对过程噪声协方

基于自适应卡尔曼滤波的弱信号跟踪方法.pdf
本发明涉及卫星导航接收机中在微弱信号下的跟踪技术,提供了一种基于自适应卡尔曼滤波的弱信号跟踪方法。其包括以下步骤:S1、中频信号经过捕获阶段后进入到跟踪阶段;S2、将中频信号分别与正弦和余弦载波复制信号混频,分为I支路和Q支路;S3、混频后的信号与伪码相乘;S4、将解调后的信号均输入到积分清除器中,获取积分值;S5、将积分值输入到鉴相器中获取载波相位误差;S6、将载波相位误差作为测量值输入至基于自适应卡尔曼滤波器的跟踪环路中,获取载波相位误差,载波多普勒误差和载波多普勒变化率;S7、更新载波数控振荡器(N

一种基于载噪比自适应卡尔曼滤波的弱信号跟踪方法.pdf
一种基于载噪比自适应卡尔曼滤波的弱信号跟踪方法,中频信号首先与本地载波NCO输出的同相和正交分量相乘,得到两路信号;然后分别与伪码相乘;进一步的,两路信号经积分清除器得到同相分量I(t)和正交分量Q(t);I(t)和Q(t)经过鉴相器得到载波相位误差;将载波相位误差输入载噪比自适应卡尔曼滤波器中,该滤波器首先计算出本段数据窗的载噪比,然后根据本段数据窗载噪比相较于前一段数据窗的载噪比的变化对观测噪声协方差进行更新,进而更新载波相位误差,载波频率误差,载波频率变化率误差;载噪比自适应卡尔曼滤波器的输出结果作
基于改进自适应滤波算法的高超目标导航信号跟踪方法.pdf
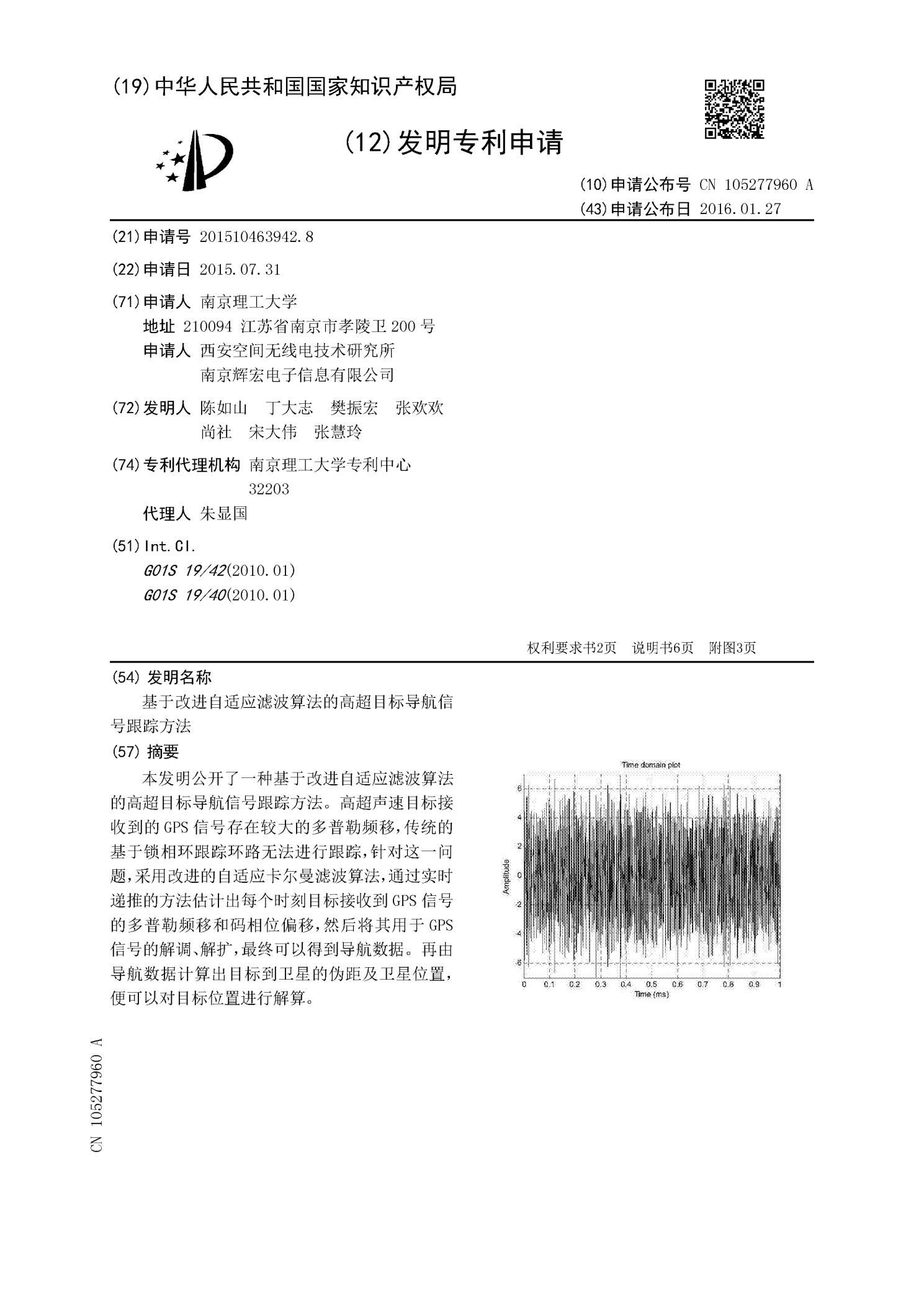
本发明公开了一种基于改进自适应滤波算法的高超目标导航信号跟踪方法。高超声速目标接收到的GPS信号存在较大的多普勒频移,传统的基于锁相环跟踪环路无法进行跟踪,针对这一问题,采用改进的自适应卡尔曼滤波算法,通过实时递推的方法估计出每个时刻目标接收到GPS信号的多普勒频移和码相位偏移,然后将其用于GPS信号的解调、解扩,最终可以得到导航数据。再由导航数据计算出目标到卫星的伪距及卫星位置,便可以对目标位置进行解算。
一种基于改进的自适应形态滤波的非稳态信号检测方法.pdf
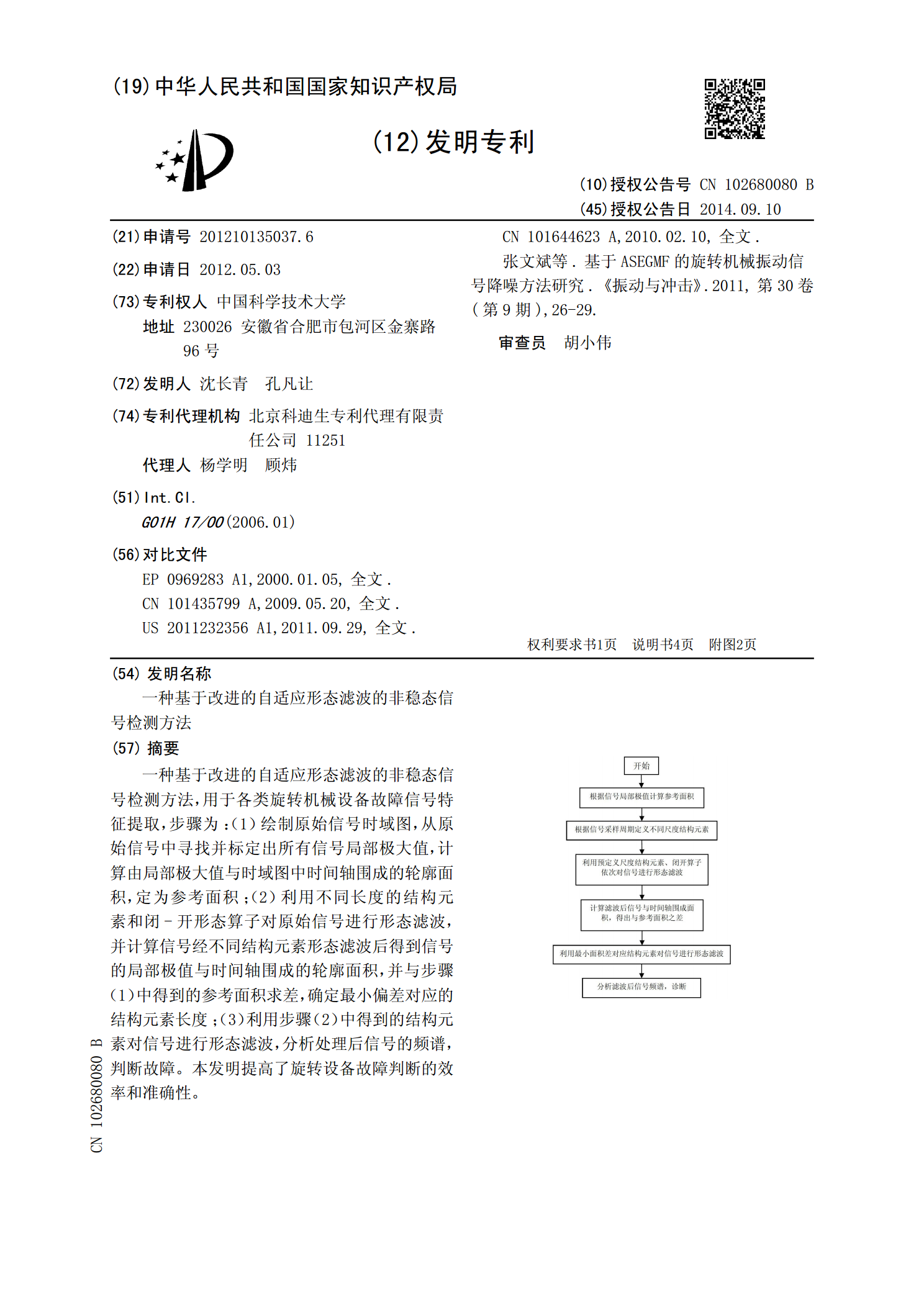
一种基于改进的自适应形态滤波的非稳态信号检测方法,用于各类旋转机械设备故障信号特征提取,步骤为:(1)绘制原始信号时域图,从原始信号中寻找并标定出所有信号局部极大值,计算由局部极大值与时域图中时间轴围成的轮廓面积,定为参考面积;(2)利用不同长度的结构元素和闭-开形态算子对原始信号进行形态滤波,并计算信号经不同结构元素形态滤波后得到信号的局部极值与时间轴围成的轮廓面积,并与步骤(1)中得到的参考面积求差,确定最小偏差对应的结构元素长度;(3)利用步骤(2)中得到的结构元素对信号进行形态滤波,分析处理后信号