
基于接收线阵的MIMO雷达空间机动目标跟踪方法.pdf

骊英****bb


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于接收线阵的MIMO雷达空间机动目标跟踪方法.pdf
本发明公开了一种基于接收线阵的MIMO雷达空间机动目标跟踪方法,该方法去掉对目标缓慢运动或静止的约束,同时估计三个角度与目标多普勒频率;充分利用三个角度与多普勒频率信息以提高目标跟踪精度;该方法是将双基地MIMO雷达配置为发射阵为均匀圆阵、接收阵为均匀线阵,采用角度多普勒联合估计方法估计出雷达目标相对于发射阵的方位角和俯仰角、相对于接收阵的接收角以及雷达目标的归一化多普勒频率,然后建立方位角、俯仰角、接收角以及雷达目标的归一化多普勒频率测元与目标运动参数之间的测量方程,采用“当前”统计模型建立目标的状态方

一种双基地MIMO雷达空间机动目标跟踪方法.pdf
本发明公开了一种双基地MIMO雷达的空间机动目标跟踪方法,能够实现对空间机动目标的三维位置、速度等运动参数的准确估计与预测;该方法将双基地MIMO雷达均匀圆阵体制应用于空间机动目标跟踪,在双基地MIMO雷达均匀圆阵角度多普勒频率估计的基础上,基于目标状态空间,在发射均匀圆阵与接收均匀圆阵的测量直角坐标系下,根据测元与目标运动状态变量之间的函数关系,进而建立测量方程,并采用适用于机动目标跟踪的“当前”统计模型建立描述目标运动参数随时间演化的状态方程,利用适用于非线性状态滤波的无迹卡尔曼滤波算法实时估计目标的

基于多目标跟踪的分布式MIMO雷达最少阵元快速提取方法.pdf
本发明属于雷达目标跟踪技术领域,特别涉及一种基于多目标跟踪的分布式MIMO雷达最少阵元快速提取方法,包含:以多目标位置估计误差最大值作为跟踪精度误差,使其小于给定位置精度,建立给定位置精度要求下的最少阵元选取优化模型;对MIMO雷达系统发射和接收阵元分别按照信号衰减从小到大进行排序,依据系统精度误差和给定位置精度,求解最少阵元选取优化模型,以确定选取阵元。本发明能够避免现有目标跟踪盲目选取阵元所带来的计算复杂度的增加,在保证多目标跟踪性能的情况下大幅降低计算量,实现对目标的快速追踪,与现有对比算法相比,计
基于共址MIMO雷达组网系统的机会协同目标跟踪方法.pptx
汇报人:CONTENTSPARTONEPARTTWO定义与原理特点与优势应用场景与限制PARTTHREE协同目标跟踪原理机会协同跟踪策略跟踪性能评估PARTFOUR共址MIMO雷达组网系统对机会协同目标跟踪的支撑机会协同目标跟踪方法在共址MIMO雷达组网系统中的应用机会协同目标跟踪方法在共址MIMO雷达组网系统中的优势与挑战PARTFIVE跟踪精度分析鲁棒性分析实时性分析PARTSIX未来发展方向技术挑战与解决方案潜在应用前景汇报人:
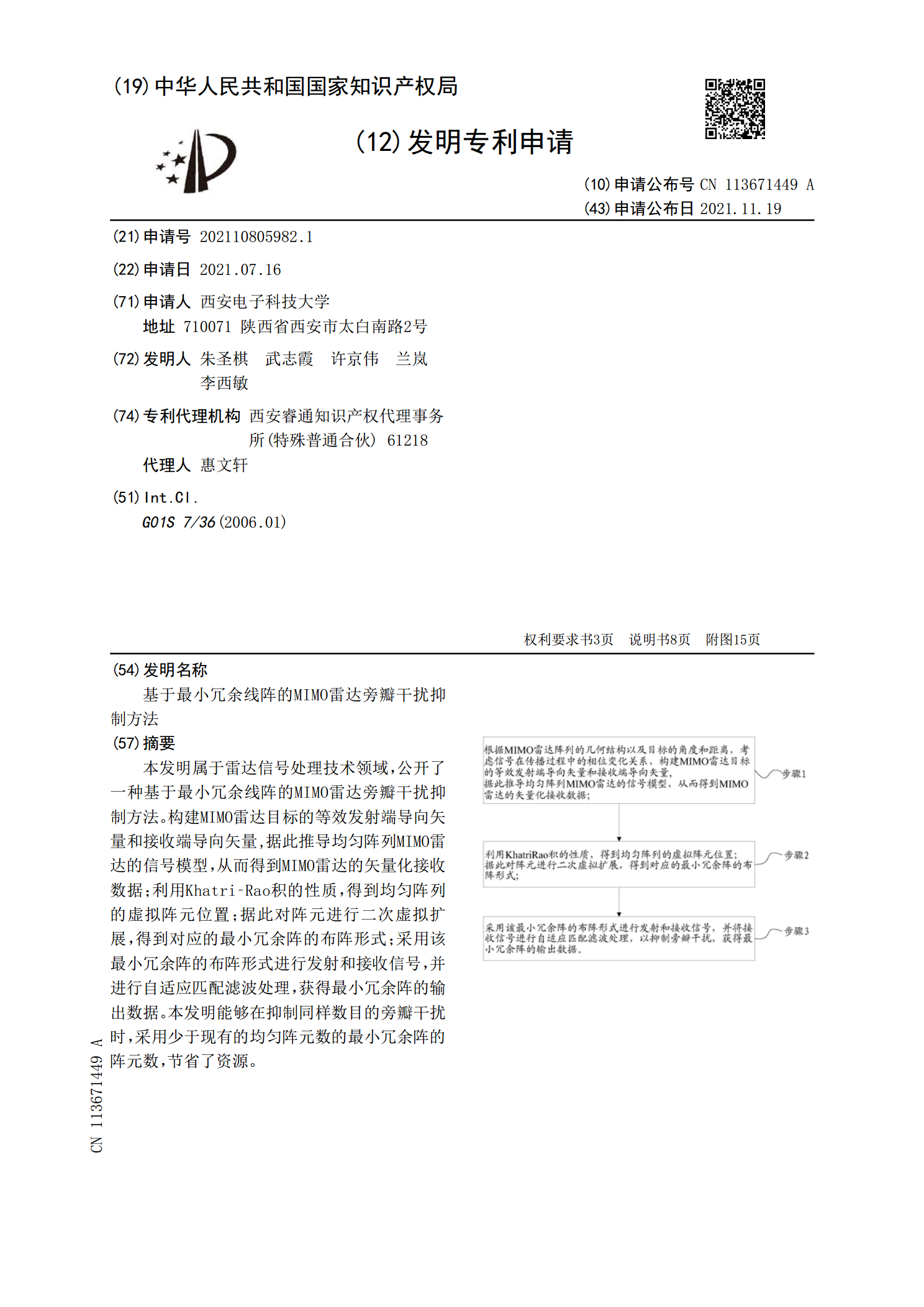
基于最小冗余线阵的MIMO雷达旁瓣干扰抑制方法.pdf
本发明属于雷达信号处理技术领域,公开了一种基于最小冗余线阵的MIMO雷达旁瓣干扰抑制方法。构建MIMO雷达目标的等效发射端导向矢量和接收端导向矢量,据此推导均匀阵列MIMO雷达的信号模型,从而得到MIMO雷达的矢量化接收数据;利用Khatri‑Rao积的性质,得到均匀阵列的虚拟阵元位置;据此对阵元进行二次虚拟扩展,得到对应的最小冗余阵的布阵形式;采用该最小冗余阵的布阵形式进行发射和接收信号,并进行自适应匹配滤波处理,获得最小冗余阵的输出数据。本发明能够在抑制同样数目的旁瓣干扰时,采用少于现有的均匀阵元数的