
一种水下机器人单目视觉定位方法.pdf

斌斌****公主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种水下机器人单目视觉定位方法.pdf
本发明提出一种水下机器人单目视觉定位方法,结合多普勒和陀螺仪测得水下机器人在载体系下的线速度和角速度,得到状态方程;取4个已知在全局系下坐标的静止特征点,通过坐标系变化,得到特征点在图像系下的位置,得到量测方程;已知k‑1时刻的状态向量和其协方差矩阵,通过Unscented变换方法,求得Sigma点;再通过一次时间更新,估计k时刻的量测值;结合多普勒和陀螺仪测得航行器在载体系下的线速度和角速度,全局系下的特征点在图像系下的位置,可以得到k时刻量测值,经过量测更新,估计k时刻的状态向量,并得到k时刻状态向量
一种基于单目相机视觉标靶定位的机械臂引导方法.pdf
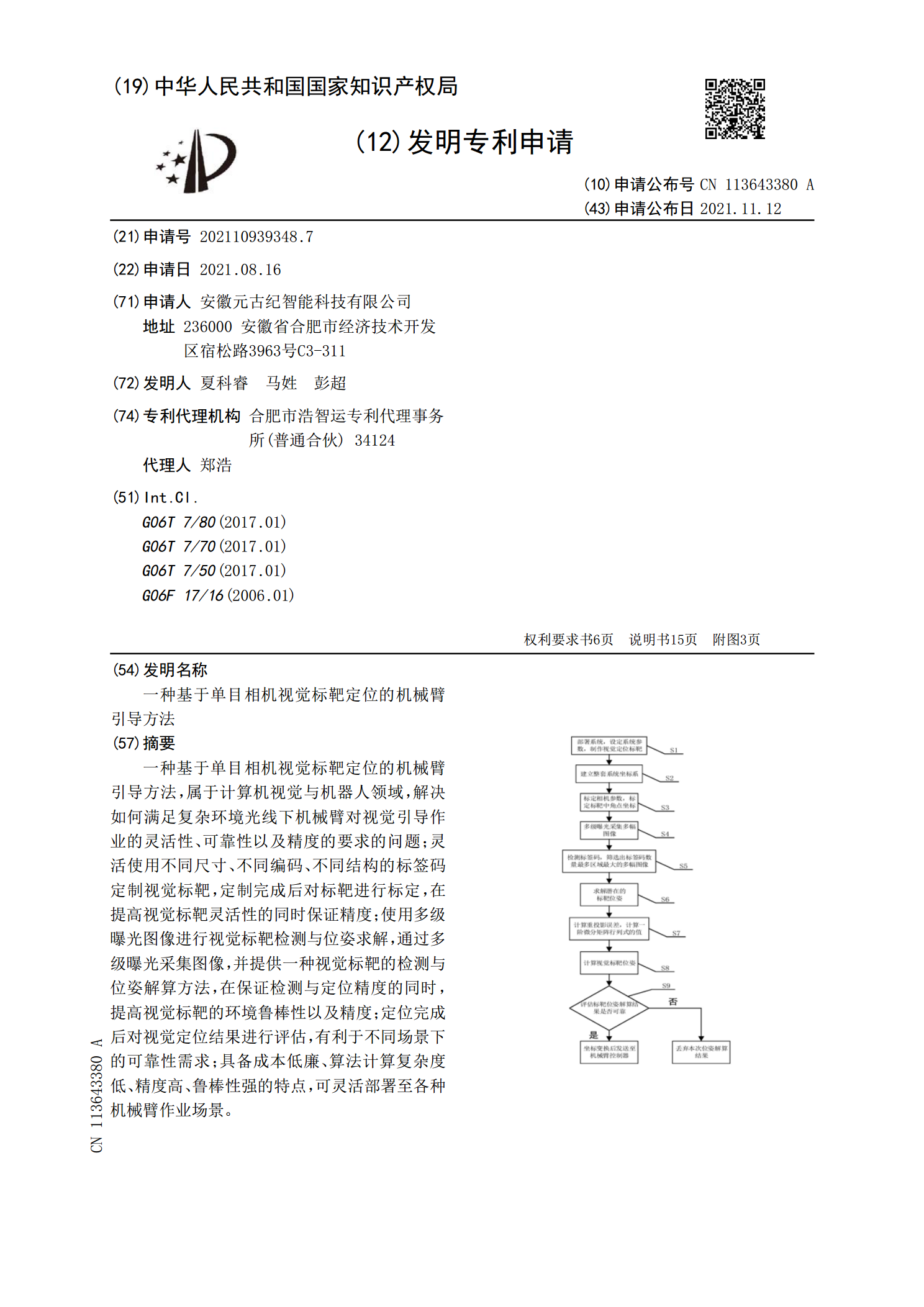
一种基于单目相机视觉标靶定位的机械臂引导方法,属于计算机视觉与机器人领域,解决如何满足复杂环境光线下机械臂对视觉引导作业的灵活性、可靠性以及精度的要求的问题;灵活使用不同尺寸、不同编码、不同结构的标签码定制视觉标靶,定制完成后对标靶进行标定,在提高视觉标靶灵活性的同时保证精度;使用多级曝光图像进行视觉标靶检测与位姿求解,通过多级曝光采集图像,并提供一种视觉标靶的检测与位姿解算方法,在保证检测与定位精度的同时,提高视觉标靶的环境鲁棒性以及精度;定位完成后对视觉定位结果进行评估,有利于不同场景下的可靠性需求;

一种单目视觉的水下目标定位与跟踪技术.pptx
单目视觉的水下目标定位与跟踪技术目录添加目录项标题技术概述技术定义技术原理技术应用场景技术优势与局限性水下目标检测与定位目标检测算法目标定位算法定位精度与可靠性实际应用案例水下目标跟踪技术跟踪算法分类跟踪算法原理跟踪性能评估实际应用案例技术挑战与解决方案光照变化与水下阴影处理目标形变与动态变化处理水下噪声与干扰抑制提高定位与跟踪稳定性的方法未来发展方向与展望技术升级与创新拓展应用领域加强跨学科合作与交流对产业的推动与影响感谢观看

基于单目直接法的水下视觉惯性里程计方法研究.docx
基于单目直接法的水下视觉惯性里程计方法研究基于单目直接法的水下视觉惯性里程计方法研究摘要:水下视觉惯性里程计是一项关键技术,广泛应用于水下机器人、潜水器、水下救援等领域。本文针对水下环境的特殊性,提出了一种基于单目直接法的水下视觉惯性里程计方法。通过分析水下光照变化和水下图像的失真问题,结合惯性测量单元(IMU)提供的姿态信息,实现了水下视觉里程计的鲁棒性和精确性。实验结果表明,本方法在水下环境下具有良好的定位精度和鲁棒性。关键词:水下视觉、惯性里程计、单目直接法、光照变化、失真、鲁棒性、精确性1.引言水

一种基于轮椅式护理机器人的单目摄像头视觉定位系统.pdf
本发明公开了一种基于轮椅式护理机器人的单目摄像头视觉定位系统,包括视觉信息获取单元,及与视觉信息获取单元电连接的跟踪定位单元和人机交互单元;所述跟踪定位单元和人机交互单元电连接。本发明的基于轮椅式护理机器人的单目摄像头视觉定位系统,通过单目摄像头获取机器人所处环境周围景物的图像;利用景物中一些自然的或者是人造的路标,通过图像处理方法识别出有关的信息;根据路标的先验知识,结合同时定位与地图构建,得到机器人具体的位置,从而实现机器人的定位。