
一种基于轮椅式护理机器人的单目摄像头视觉定位系统.pdf

一只****签网

1/5
2/5

3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于轮椅式护理机器人的单目摄像头视觉定位系统.pdf
本发明公开了一种基于轮椅式护理机器人的单目摄像头视觉定位系统,包括视觉信息获取单元,及与视觉信息获取单元电连接的跟踪定位单元和人机交互单元;所述跟踪定位单元和人机交互单元电连接。本发明的基于轮椅式护理机器人的单目摄像头视觉定位系统,通过单目摄像头获取机器人所处环境周围景物的图像;利用景物中一些自然的或者是人造的路标,通过图像处理方法识别出有关的信息;根据路标的先验知识,结合同时定位与地图构建,得到机器人具体的位置,从而实现机器人的定位。

一种基于单目摄像头的嵌入式手势控制方法及系统.pdf
本发明公开了一种基于单目摄像头的嵌入式手势控制方法及系统,该方法包括以下步骤:S1、自动调节单目摄像头曝光参数,获取具有清晰轮廓的手势图片;S2、静态手势的识别,输出静态手势识别结果;S3、动态手势的识别,输出动态手势识别结果;S4、融合识别结果,选择输出动态识别结果或静态识别结果。本发明通过在低性能的嵌入式平台上利用单目摄像头实现多种静态手势以及三个维度的动态手势的识别,可以应用于诸如智能家居的控制、机器人的控制、车辆驾驶的控制、PPT控制,音乐控制等场合,其能运行在绝大多数的嵌入式平台、资源占用率低、

基于OpenCV的单目二维多机器人定位系统.docx
基于OpenCV的单目二维多机器人定位系统基于OpenCV的单目二维多机器人定位系统摘要:随着机器人技术的不断发展,多机器人协作系统的研究日益受到关注。定位是多机器人系统的关键问题之一,它为机器人的导航、协调和合作提供了重要支持。本论文基于OpenCV平台,提出了一种基于单目视觉的二维多机器人定位系统。该系统利用机器人装载的单目相机,通过视觉实时感知机器人周围环境,提取特征点并利用OpenCV中的特征匹配算法进行特征点匹配,从而完成机器人的定位任务。通过实验验证,该系统具有较高的定位精度和实时性,适用于多

基于SURF算法的单目转双目视觉定位.docx
基于SURF算法的单目转双目视觉定位摘要在机器视觉与计算机图形学领域,单目视觉和双目视觉都是广泛应用的技术。其中,双目视觉的优点在于其可以提供更多的深度信息和更高的精度。本文主要介绍了基于SURF算法的单目转双目视觉定位技术,包括SURF算法的基本原理及其在单目转双目视觉定位中的应用,以及该技术的实验结果和展望。关键词:SURF算法、单目视觉、双目视觉、定位1.引言随着计算机技术和机器视觉技术的发展,单目视觉和双目视觉技术广泛应用于各个领域中。在现实世界的应用中,随着场景复杂度的增加以及对深度精度要求的提
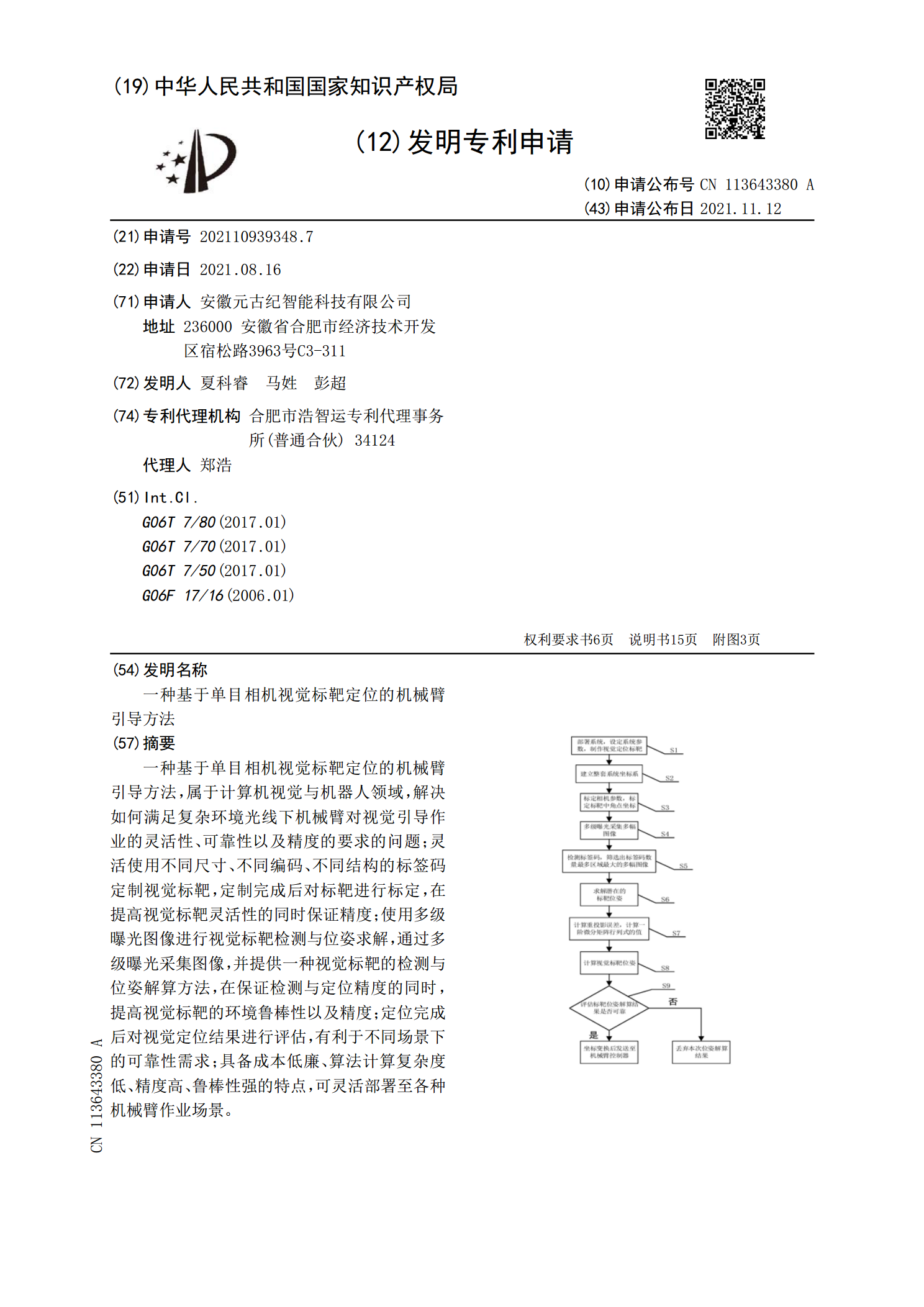
一种基于单目相机视觉标靶定位的机械臂引导方法.pdf
一种基于单目相机视觉标靶定位的机械臂引导方法,属于计算机视觉与机器人领域,解决如何满足复杂环境光线下机械臂对视觉引导作业的灵活性、可靠性以及精度的要求的问题;灵活使用不同尺寸、不同编码、不同结构的标签码定制视觉标靶,定制完成后对标靶进行标定,在提高视觉标靶灵活性的同时保证精度;使用多级曝光图像进行视觉标靶检测与位姿求解,通过多级曝光采集图像,并提供一种视觉标靶的检测与位姿解算方法,在保证检测与定位精度的同时,提高视觉标靶的环境鲁棒性以及精度;定位完成后对视觉定位结果进行评估,有利于不同场景下的可靠性需求;