
用于确定运动物体的位置的方法和系统.pdf

康佳****文库


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于确定运动物体的位置的方法和系统.pdf
本发明涉及一种用于确定运动物体相对于由一组几何表面建模的环境的相对位置的方法,所述一组几何表面根据环境中的参照系形成3D模型,该方法包括:在至少一个方向上测量从物体到环境的多个距离以便获得运动物体的参照系中的一组限定的点的步骤(10),评估所述一组点与环境的3D模型之间的差异的步骤,以及从所述差异确定运动物体在环境的参照系中的相对位置的步骤(20)。
用于确定位置的系统和方法.pdf
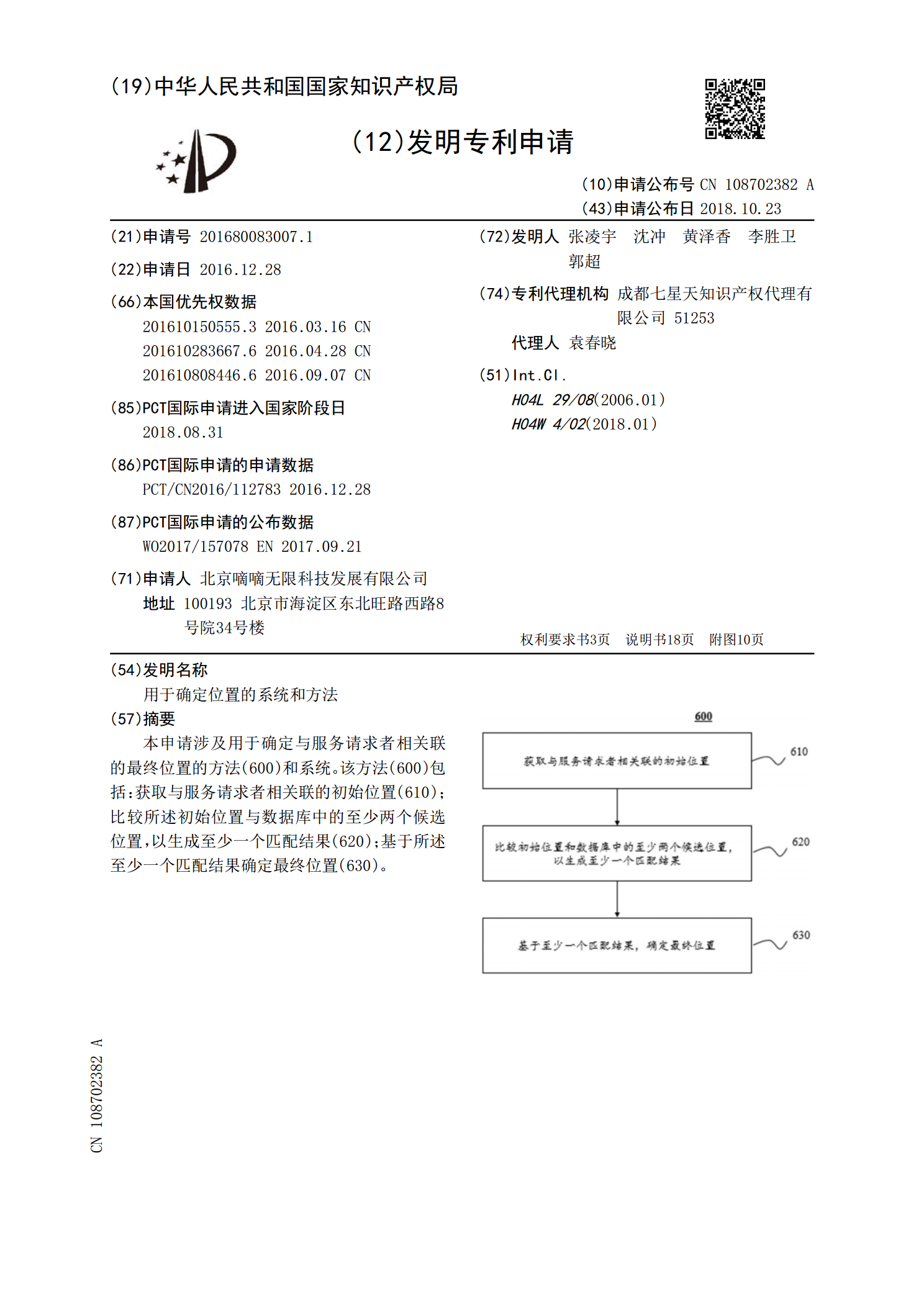
本申请涉及用于确定与服务请求者相关联的最终位置的方法(600)和系统。该方法(600)包括:获取与服务请求者相关联的初始位置(610);比较所述初始位置与数据库中的至少两个候选位置,以生成至少一个匹配结果(620);基于所述至少一个匹配结果确定最终位置(630)。
用于确定节点位置的方法和系统.pdf
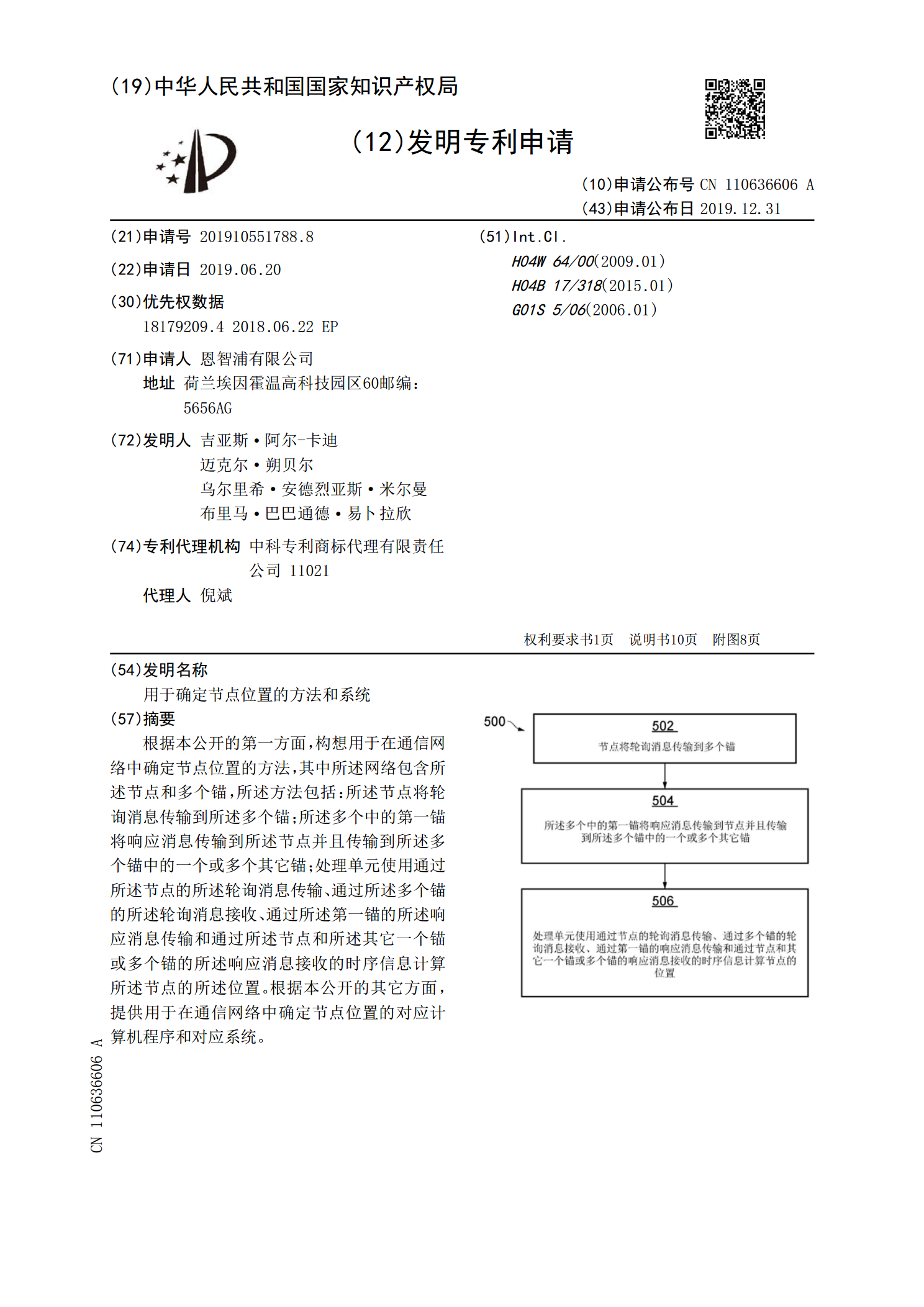
根据本公开的第一方面,构想用于在通信网络中确定节点位置的方法,其中所述网络包含所述节点和多个锚,所述方法包括:所述节点将轮询消息传输到所述多个锚;所述多个中的第一锚将响应消息传输到所述节点并且传输到所述多个锚中的一个或多个其它锚;处理单元使用通过所述节点的所述轮询消息传输、通过所述多个锚的所述轮询消息接收、通过所述第一锚的所述响应消息传输和通过所述节点和所述其它一个锚或多个锚的所述响应消息接收的时序信息计算所述节点的所述位置。根据本公开的其它方面,提供用于在通信网络中确定节点位置的对应计算机程序和对应系统
用于确定磁体位置的设备、方法和系统.pdf
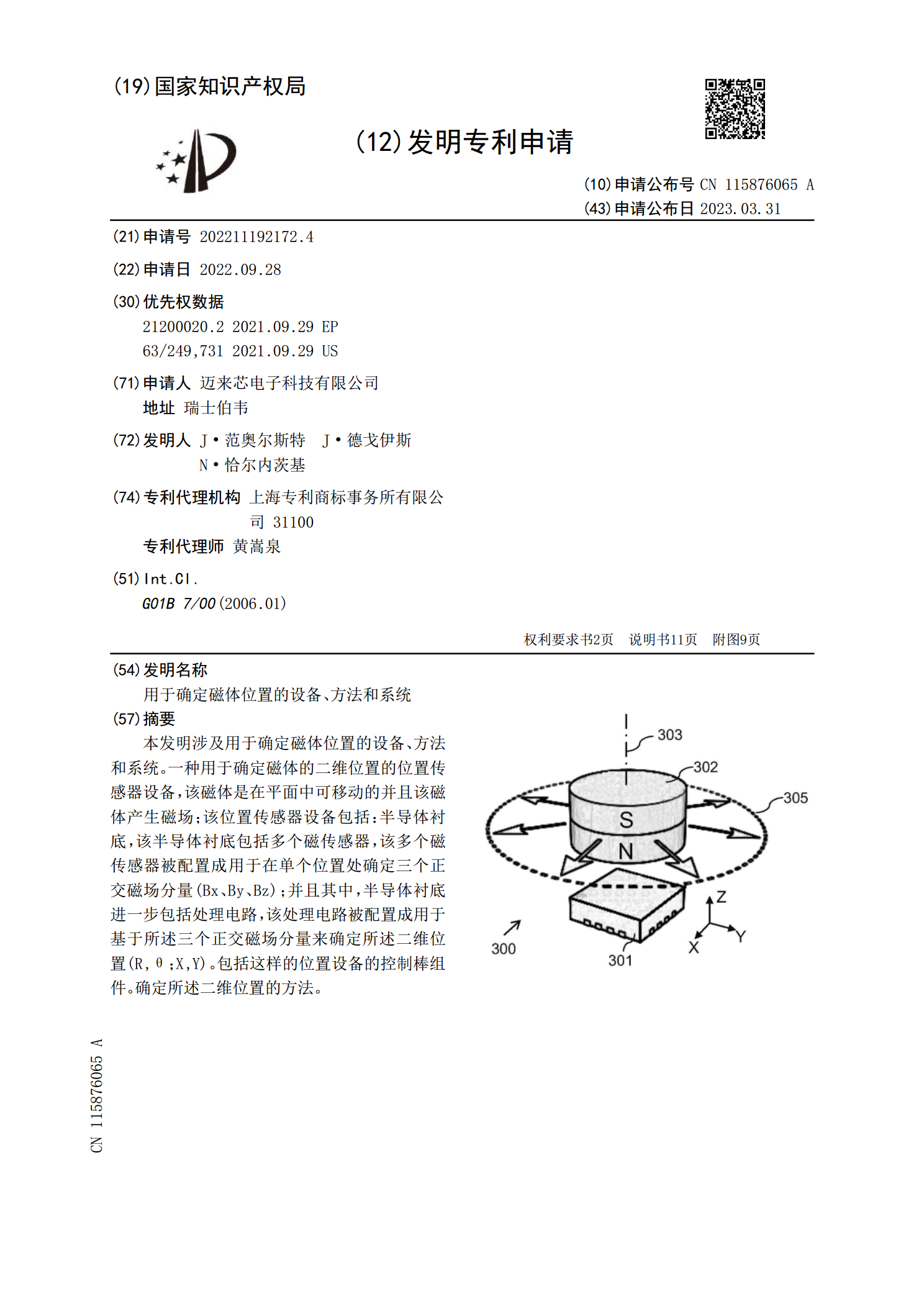
本发明涉及用于确定磁体位置的设备、方法和系统。一种用于确定磁体的二维位置的位置传感器设备,该磁体是在平面中可移动的并且该磁体产生磁场;该位置传感器设备包括:半导体衬底,该半导体衬底包括多个磁传感器,该多个磁传感器被配置成用于在单个位置处确定三个正交磁场分量(Bx、By、Bz);并且其中,半导体衬底进一步包括处理电路,该处理电路被配置成用于基于所述三个正交磁场分量来确定所述二维位置(R,θ;X,Y)。包括这样的位置设备的控制棒组件。确定所述二维位置的方法。
用于确定磁体位置的设备、系统和方法.pdf
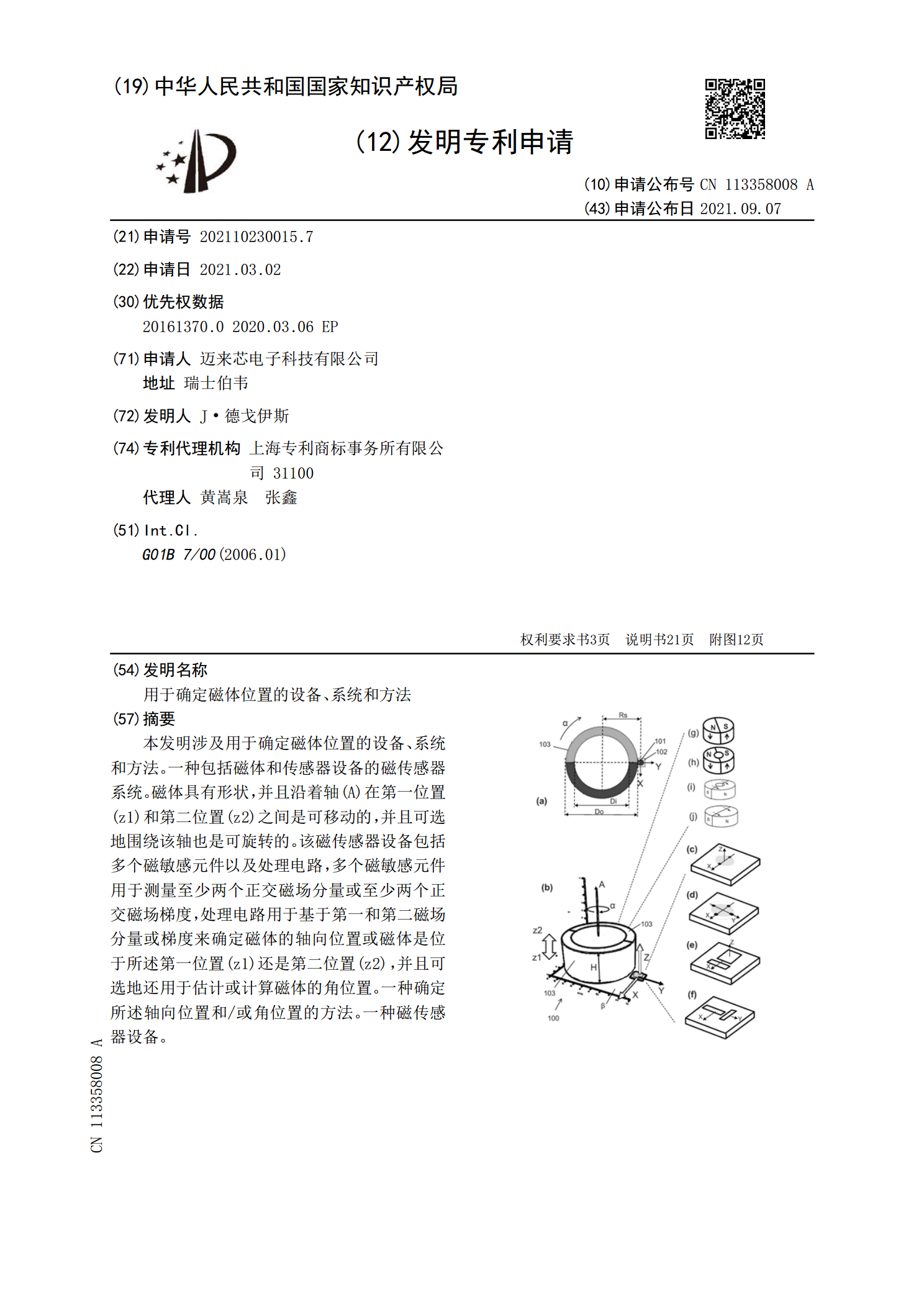
本发明涉及用于确定磁体位置的设备、系统和方法。一种包括磁体和传感器设备的磁传感器系统。磁体具有形状,并且沿着轴(A)在第一位置(z1)和第二位置(z2)之间是可移动的,并且可选地围绕该轴也是可旋转的。该磁传感器设备包括多个磁敏感元件以及处理电路,多个磁敏感元件用于测量至少两个正交磁场分量或至少两个正交磁场梯度,处理电路用于基于第一和第二磁场分量或梯度来确定磁体的轴向位置或磁体是位于所述第一位置(z1)还是第二位置(z2),并且可选地还用于估计或计算磁体的角位置。一种确定所述轴向位置和/或角位置的方法。一种