
一种基于恒虚警率检测的多目标体检测及定位方法.pdf

Ch****91


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于恒虚警率检测的多目标体检测及定位方法.pdf
本发明提供了一种基于恒虚警率检测的用于生命探测雷达的多目标体检测及定位方法,包括以下步骤:步骤A:输入原始信号,并将原始信号按道数排列成B‑SCAN图,其中快时间向包含距离信息,慢时间向包含频率信息;步骤B:去除原始数据中的静态杂波和线性趋势项;步骤C:对同一个采样时刻获得的所有道信息进行傅里叶变换,得到距离‑多普勒信息图;步骤D:在距离‑多普勒域运用基于CFAR的目标检测算法,将目标体在距离‑多普勒域上标记出来;步骤E:判断CFAR输出的图像中有无非零点,若存在非零点则将输出的结果进行目标识别,输出目标

一种目标恒虚警率检测方法及系统.pdf
本发明公开一种目标恒虚警率检测方法及系统,所述方法包括:对回波信号的每一单元进行恒虚警率检测,得到每一单元的检测标识;对所述检测标识为过门限的单元进行目标单元判断,得到目标单元的单元序号和幅度。本发明利用回波信号幅度起伏特性,对检测后的相同目标进行判别、合并,有效减少了对相同目标的冗余检测,减小系统对相同目标的处理开销,提高了系统系能;另外,实现了不改变系统原有分辨力的条件下的相同目标合并,不降低目标距离分辨力或多普勒分辨力,提高了系统多目标检测能力。解决现有方法对相同目标冗余检测的问题。
基于OpenCL的雷达信号自适应恒虚警率检测优化方法.pdf
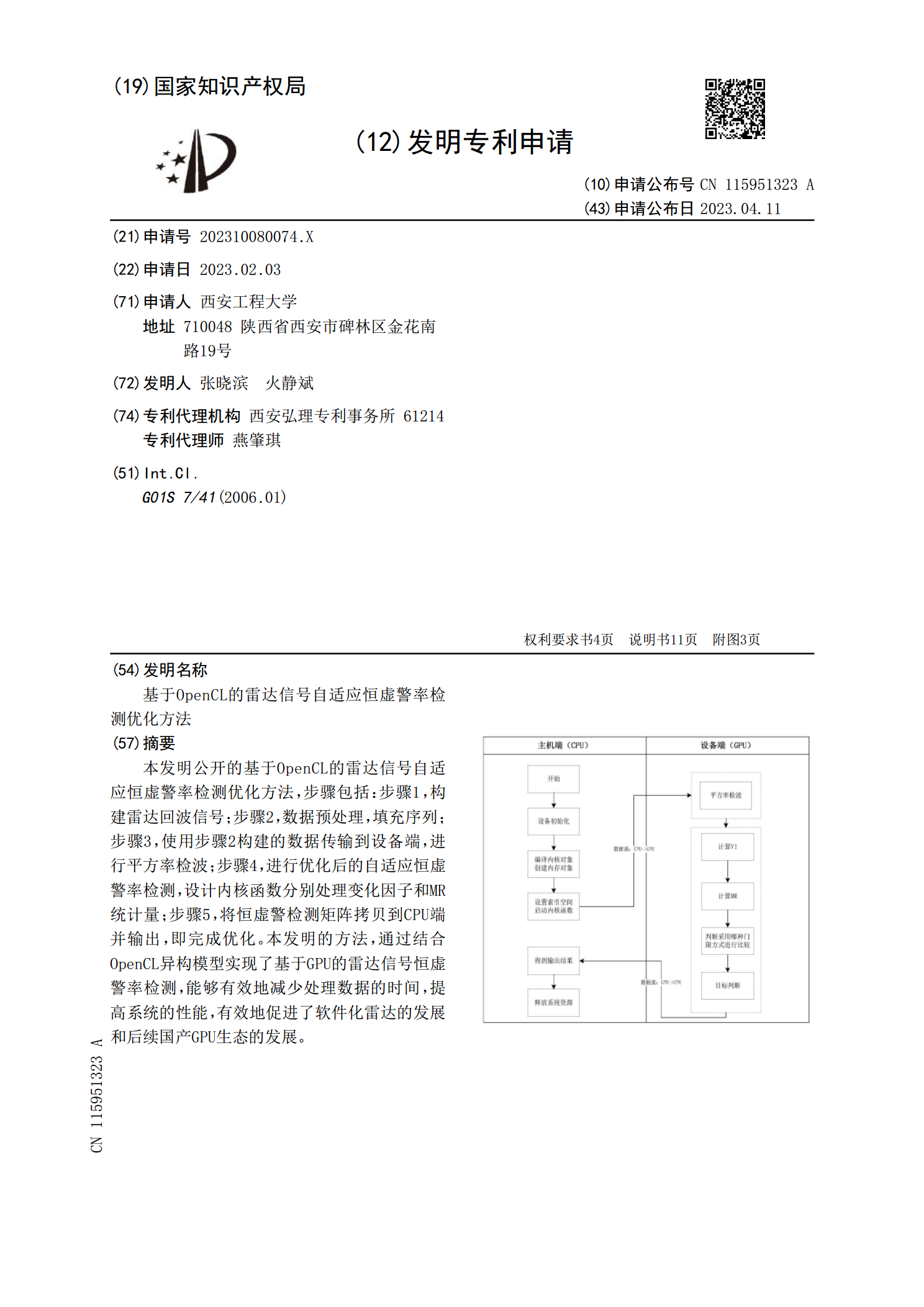
本发明公开的基于OpenCL的雷达信号自适应恒虚警率检测优化方法,步骤包括:步骤1,构建雷达回波信号;步骤2,数据预处理,填充序列;步骤3,使用步骤2构建的数据传输到设备端,进行平方率检波;步骤4,进行优化后的自适应恒虚警率检测,设计内核函数分别处理变化因子和MR统计量;步骤5,将恒虚警检测矩阵拷贝到CPU端并输出,即完成优化。本发明的方法,通过结合OpenCL异构模型实现了基于GPU的雷达信号恒虚警率检测,能够有效地减少处理数据的时间,提高系统的性能,有效地促进了软件化雷达的发展和后续国产GPU生态的发

一种新的分块恒虚警率检测技术.docx
一种新的分块恒虚警率检测技术标题:基于新的分块恒虚警率检测技术摘要:随着信息技术的发展,网络安全问题变得日益突出。针对网络安全威胁的检测方法和技术也在不断地被研究和改进。本论文提出了一种新的分块恒虚警率检测技术,旨在提高网络安全防护的效率和准确性。该技术通过在数据分块过程中引入恒虚警率检测算法,能在大规模的网络流量中实时监测和检测恶意攻击,并对其进行快速响应。1.引言网络安全威胁对企业和个人都构成了巨大的风险。因此,具备高效、准确而又实时的网络安全防护手段显得尤为重要。文中将介绍分块恒虚警率检测技术的原理

一种毫米波雷达恒虚警率检测方法及装置.pdf
本发明实施例提供了一种毫米波雷达恒虚警率检测方法及装置,接收毫米波雷达发射的调频连续波FMCW信号经检测目标反射后的信号,对所接收到的信号进行预设信号处理,得到距离‑多普勒矩阵,根据距离‑多普勒矩阵,计算检测点的二维平面平均噪声功率;基于预设虚警概率、噪声概率分布、杂波干扰概率分布和检测目标概率分布,采用N‑P准则计算在二维平面平均噪声功率下的噪声筛选门限;根据噪声筛选门限,对距离‑多普勒矩阵进行噪声点筛选,得到候选目标点集合;采用二维加窗恒虚警检测,确定目标点,并基于目标点确定针对探测目标的检测结果。实