
用于作业工具识别的系统和方法.pdf

St****12

1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于作业工具识别的系统和方法.pdf
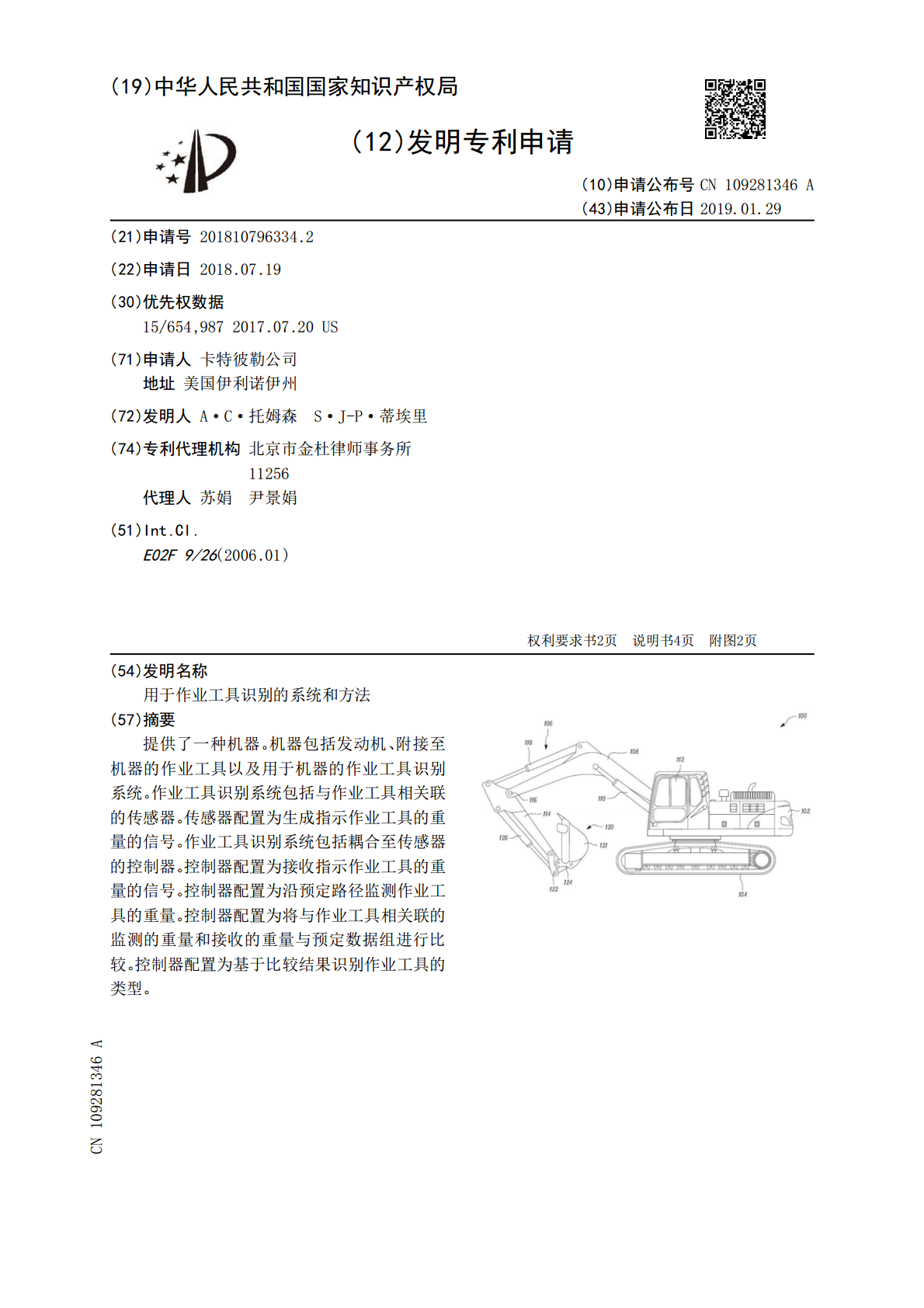
提供了一种机器。机器包括发动机、附接至机器的作业工具以及用于机器的作业工具识别系统。作业工具识别系统包括与作业工具相关联的传感器。传感器配置为生成指示作业工具的重量的信号。作业工具识别系统包括耦合至传感器的控制器。控制器配置为接收指示作业工具的重量的信号。控制器配置为沿预定路径监测作业工具的重量。控制器配置为将与作业工具相关联的监测的重量和接收的重量与预定数据组进行比较。控制器配置为基于比较结果识别作业工具的类型。

用于连接的作业工具识别的无线系统和方法.pdf
一种短程无线设备(30)包括以第一信号强度传输数据的短程数据传输部件(38)。移动检测设备(40)提供支持短程无线设备(30)的作业工具(26)与机器(10)处于联接配置的指示,或者打算与机器(10)联接的指示。处理器(32)响应于该指示将第一信号强度降低到第二信号强度。然后,短程数据传输部件(38)以第二信号强度传输数据。
用于系统识别的系统和方法.pdf
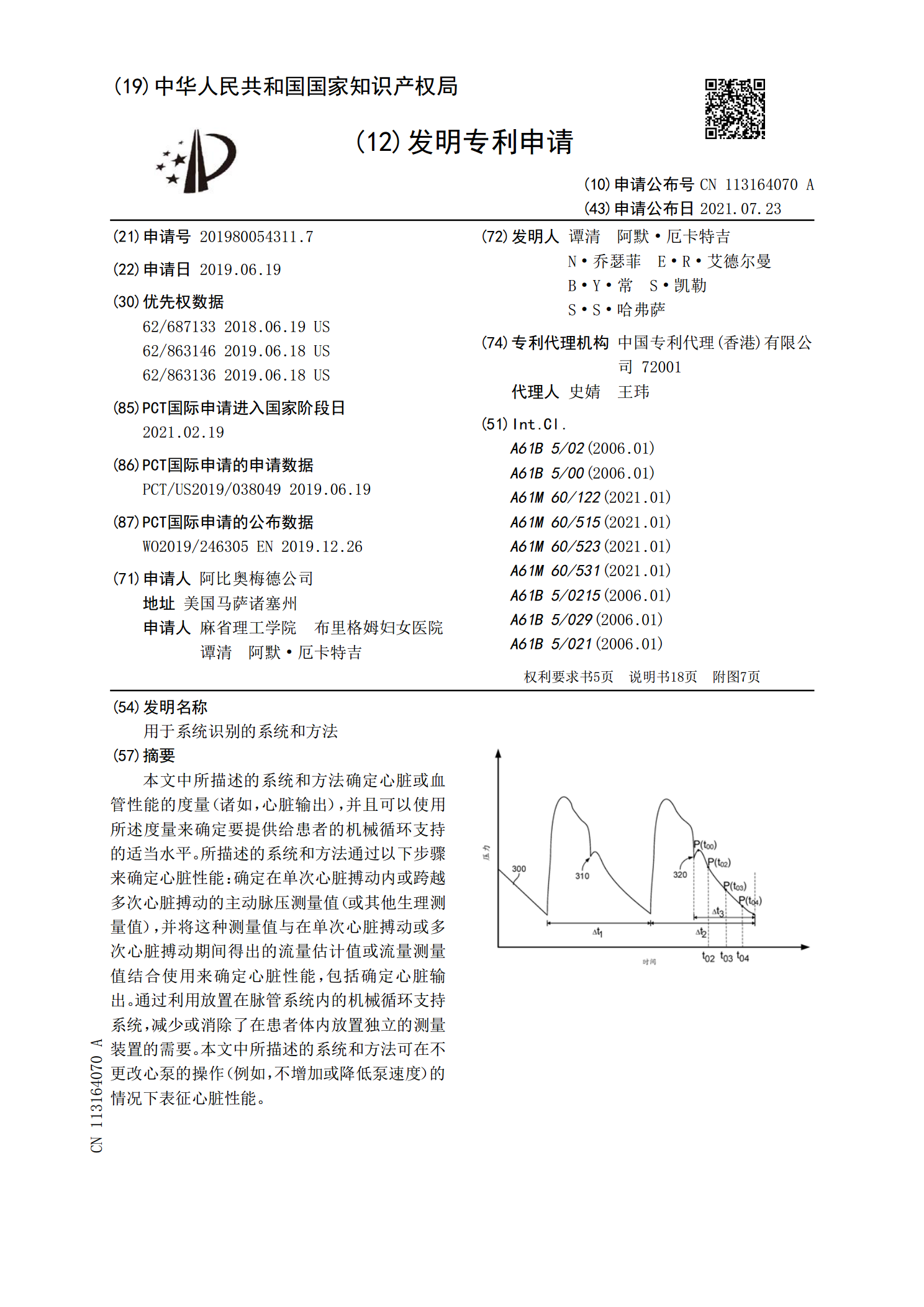
本文中所描述的系统和方法确定心脏或血管性能的度量(诸如,心脏输出),并且可以使用所述度量来确定要提供给患者的机械循环支持的适当水平。所描述的系统和方法通过以下步骤来确定心脏性能:确定在单次心脏搏动内或跨越多次心脏搏动的主动脉压测量值(或其他生理测量值),并将这种测量值与在单次心脏搏动或多次心脏搏动期间得出的流量估计值或流量测量值结合使用来确定心脏性能,包括确定心脏输出。通过利用放置在脉管系统内的机械循环支持系统,减少或消除了在患者体内放置独立的测量装置的需要。本文中所描述的系统和方法可在不更改心泵的操作(

用于玩具识别的系统和方法.pdf
一种用于识别组装以形成真实世界玩具建造模型的玩具建造系统的多个真实世界玩具建造元件的计算机实现的方法,每个真实世界玩具建造元件包括联接构件,用于将所述真实世界玩具建造元件与所述玩具建造系统的一个或多个其他真实世界玩具建造元件可拆卸地连接,从而形成所述真实世界玩具建造模型;其中所述方法包括:接收所述真实世界玩具建造模型的至少一个捕获图像;处理所述至少一个捕获图像,以便从所述玩具建造系统的多个已知的真实世界玩具建造元件的存储的数字表示将所述至少一个捕获图像中的至少第一真实世界玩具建造元件至少初步地识别为第一已
用于身份识别的方法和系统.pdf
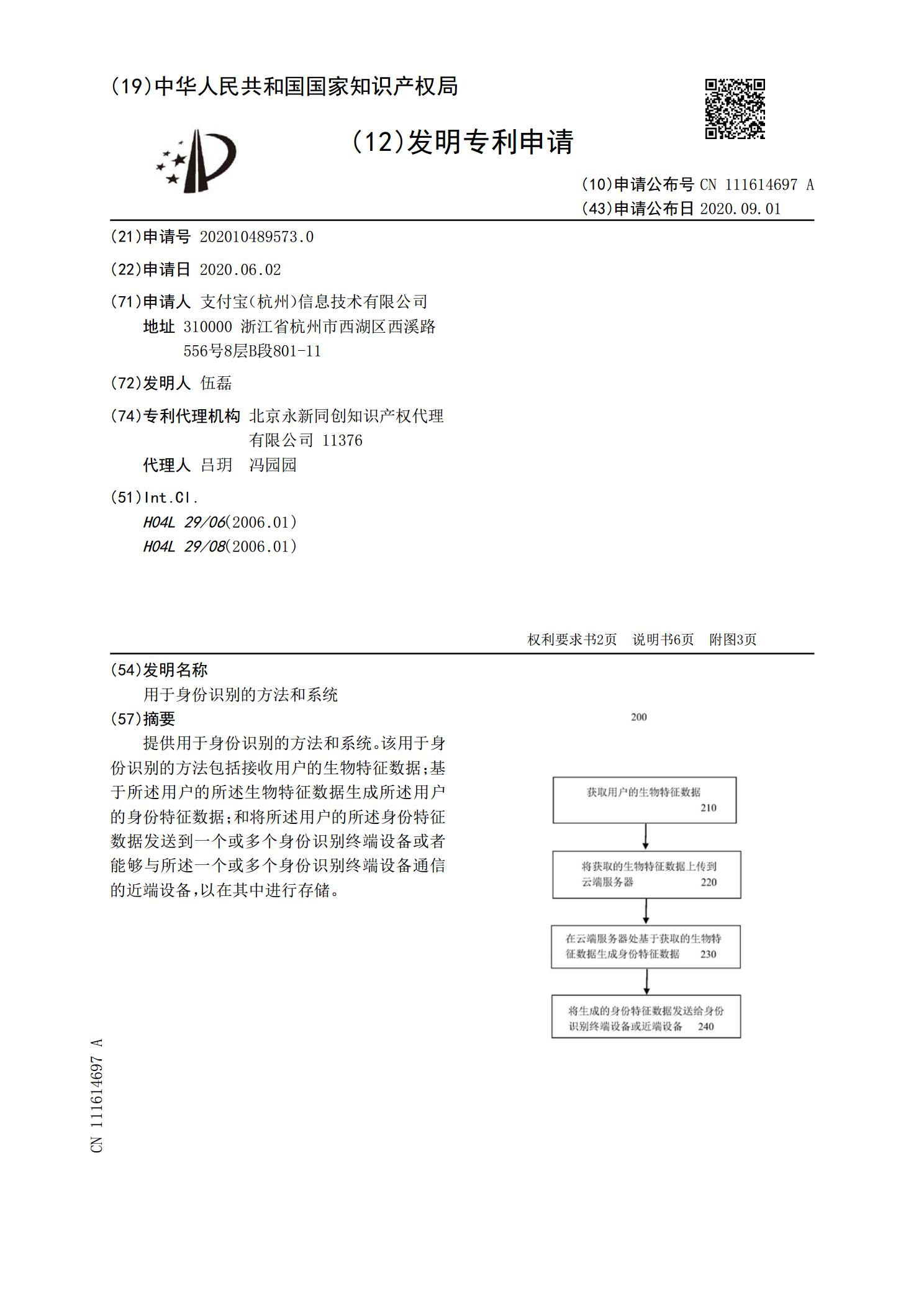
提供用于身份识别的方法和系统。该用于身份识别的方法包括接收用户的生物特征数据;基于所述用户的所述生物特征数据生成所述用户的身份特征数据;和将所述用户的所述身份特征数据发送到一个或多个身份识别终端设备或者能够与所述一个或多个身份识别终端设备通信的近端设备,以在其中进行存储。