
基于多特征联合与Mean Shift算法的多目标跟踪方法.pdf

努力****爱敏

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多特征联合与Mean Shift算法的多目标跟踪方法.pdf
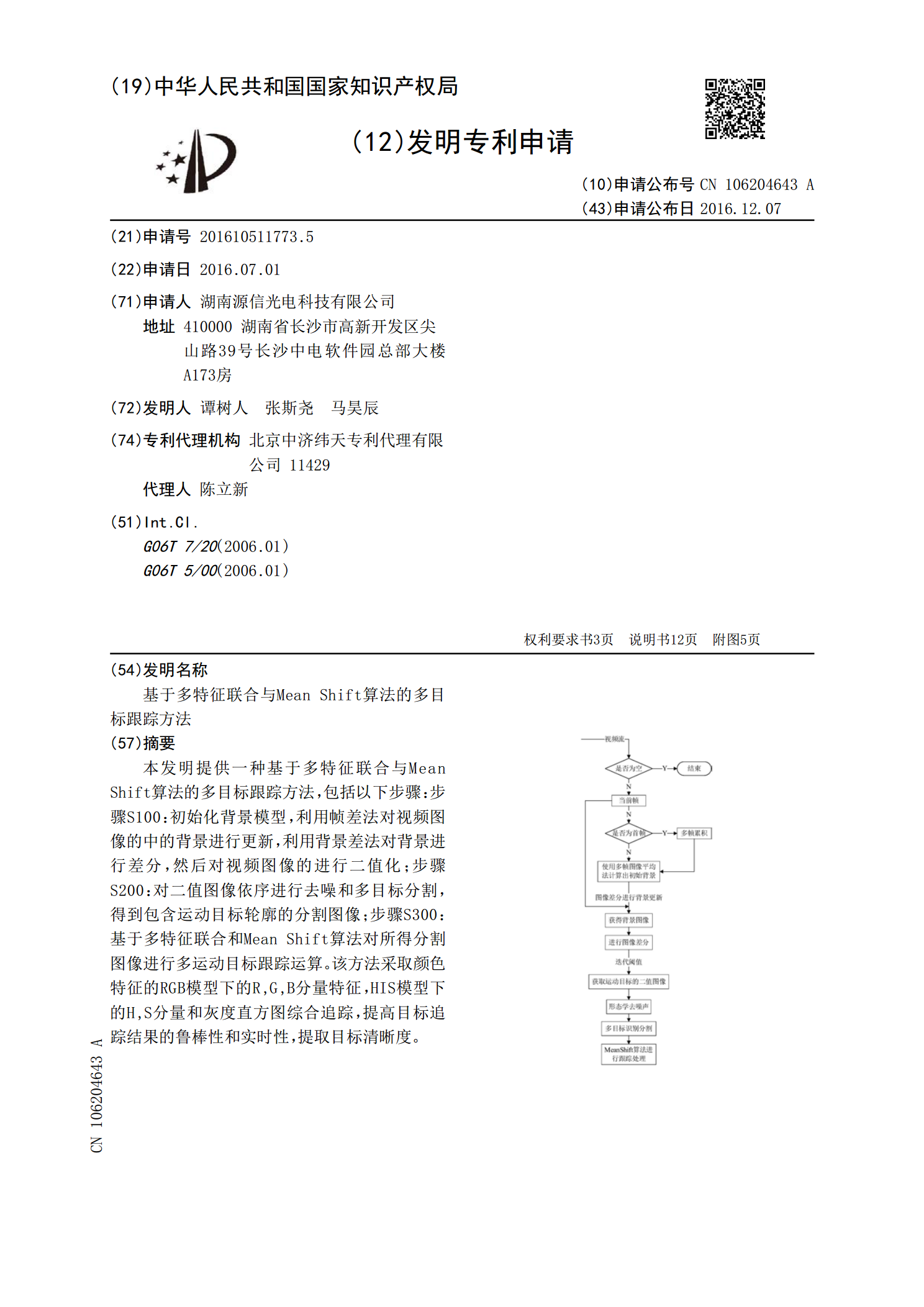
本发明提供一种基于多特征联合与MeanShift算法的多目标跟踪方法,包括以下步骤:步骤S100:初始化背景模型,利用帧差法对视频图像的中的背景进行更新,利用背景差法对背景进行差分,然后对视频图像的进行二值化;步骤S200:对二值图像依序进行去噪和多目标分割,得到包含运动目标轮廓的分割图像;步骤S300:基于多特征联合和MeanShift算法对所得分割图像进行多运动目标跟踪运算。该方法采取颜色特征的RGB模型下的R,G,B分量特征,HIS模型下的H,S分量和灰度直方图综合追踪,提高目标追踪结果的鲁棒性

基于Mean Shift的多目标跟踪算法研究.docx
基于MeanShift的多目标跟踪算法研究随着目标跟踪技术的不断发展,人们对于多目标跟踪算法的研究越来越深入。目前,基于MeanShift的多目标跟踪算法受到了广泛的关注和研究。本文将从多目标跟踪算法、MeanShift算法和基于MeanShift的多目标跟踪算法三个方面,详细介绍基于MeanShift的多目标跟踪算法的研究。一、多目标跟踪算法目标跟踪是计算机视觉领域中的基础任务,它的主要目的是在视频流或图像序列中实时地获取感兴趣的移动物体,并跟踪它们的运动轨迹。常见的目标跟踪算法包括背景减法、卡尔曼滤波

基于预测的多特征融合Mean-Shift跟踪算法.docx
基于预测的多特征融合Mean-Shift跟踪算法基于预测的多特征融合Mean-Shift跟踪算法摘要:跟踪是计算机视觉领域的一个重要问题,对于实时视频分析和监控具有重要意义。Mean-Shift是一种常用的对象跟踪算法,但是在面对目标快速移动、遮挡等复杂场景时表现不佳。本文提出了一种基于预测的多特征融合Mean-Shift跟踪算法,通过引入预测模块和多特征融合策略来提高跟踪性能。实验结果表明,该算法在面对目标快速移动和遮挡的情况下具有较好的鲁棒性和准确性。关键词:对象跟踪;Mean-Shift;预测模块;

基于特征融合和Mean Shift的多目标跟踪方法研究的开题报告.docx
基于特征融合和MeanShift的多目标跟踪方法研究的开题报告一、选题背景在智能视频监控、交通监控、人机交互等领域中,多目标跟踪是其中的一个重要研究方向。多目标跟踪是指在视频序列中对多个目标进行实时跟踪并确定它们在图像中的位置和运动状态,通常需要考虑到目标之间的相互干扰和遮挡等因素。其主要目的为获得目标在时间和空间上的行为特征,进行统计分析和信息挖掘,从而提取有用的信息。目前,基于特征融合和MeanShift的多目标跟踪方法已经成为研究热点,已经有很多相关的研究成果。这些方法通过将目标的多维特征信息进行融

基于多信息融合的Mean-Shift跟踪算法.docx
基于多信息融合的Mean-Shift跟踪算法基于多信息融合的Mean-Shift跟踪算法摘要随着计算机视觉的快速发展,目标跟踪在许多应用中变得越来越重要。Mean-Shift算法是一种经典的目标跟踪方法,但在复杂的场景下存在一些限制。本论文提出了一种基于多信息融合的Mean-Shift跟踪算法,通过融合颜色直方图、梯度直方图和空间信息来提高跟踪性能。实验证明,所提出的算法在复杂的场景中能够有效地跟踪目标。1.引言目标跟踪是计算机视觉领域的一个重要研究方向,它广泛应用于视频监控、自动驾驶、增强现实等领域。M