
用于磁传感器装置与致动器进行相互校准的方法及包括致动器和磁传感器装置的致动器设备.pdf

光誉****君哥


1/10
2/10

3/10

4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于磁传感器装置与致动器进行相互校准的方法及包括致动器和磁传感器装置的致动器设备.pdf
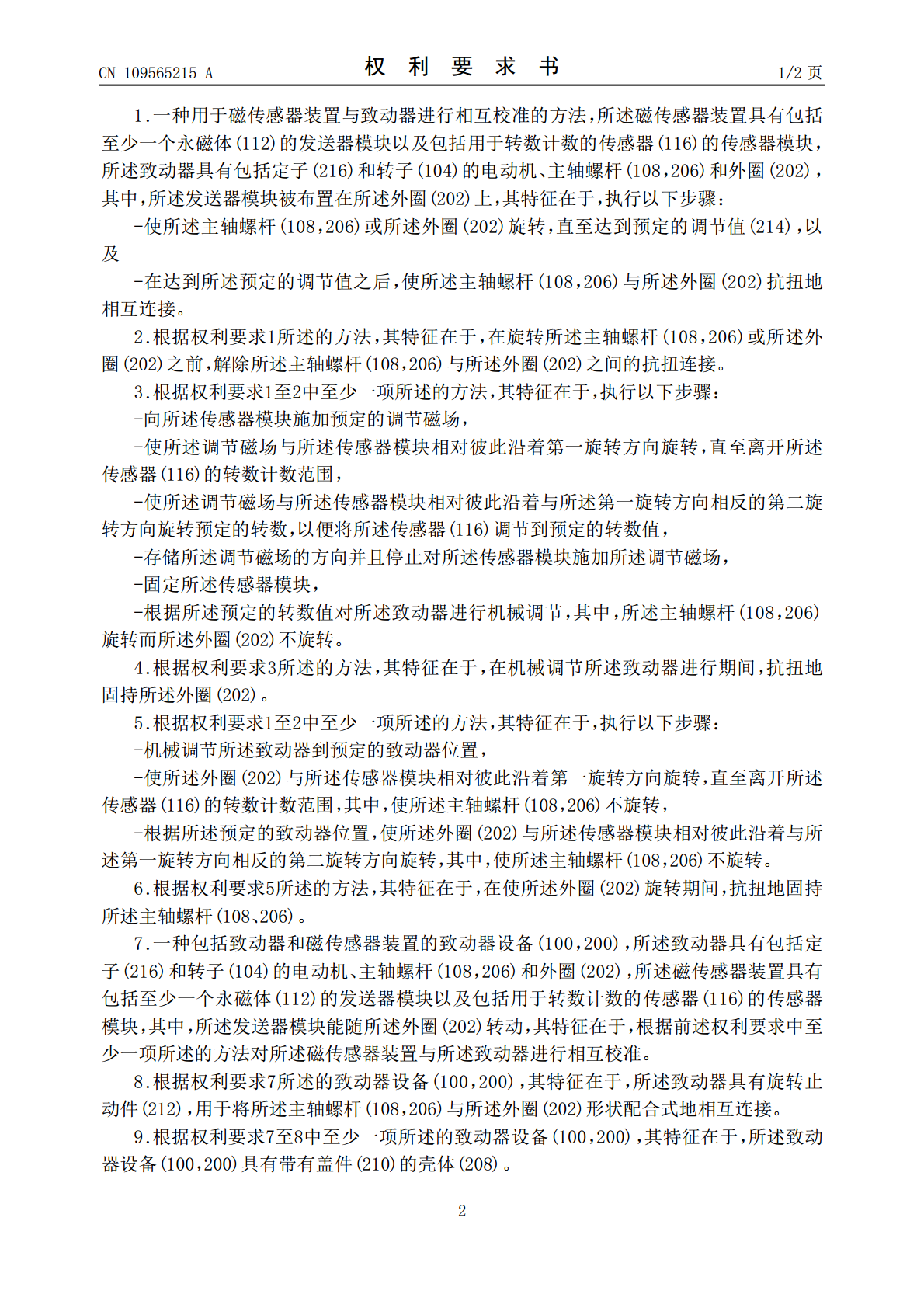
本发明涉及一种对磁传感器装置与致动器进行相互校准的方法,所述磁传感器装置具有包括至少一个永磁体(112)的发送器模块以及包括用于转数计数的传感器(116)的传感器模块,所述致动器具有包括定子和转子(104)的电动机、主轴螺杆(108)和外圈,其中,将发送器模块布置在外圈上,其中,执行以下步骤:使主轴螺杆(108)或外圈旋转,直至达到预定的调节值,并且在达到预定的调节值之后,使主轴螺杆(108)与外圈以抗扭地相互连接;并且本发明还涉及一种包括致动器和磁传感器装置的致动器设备(100),所以致动器具有包括定子
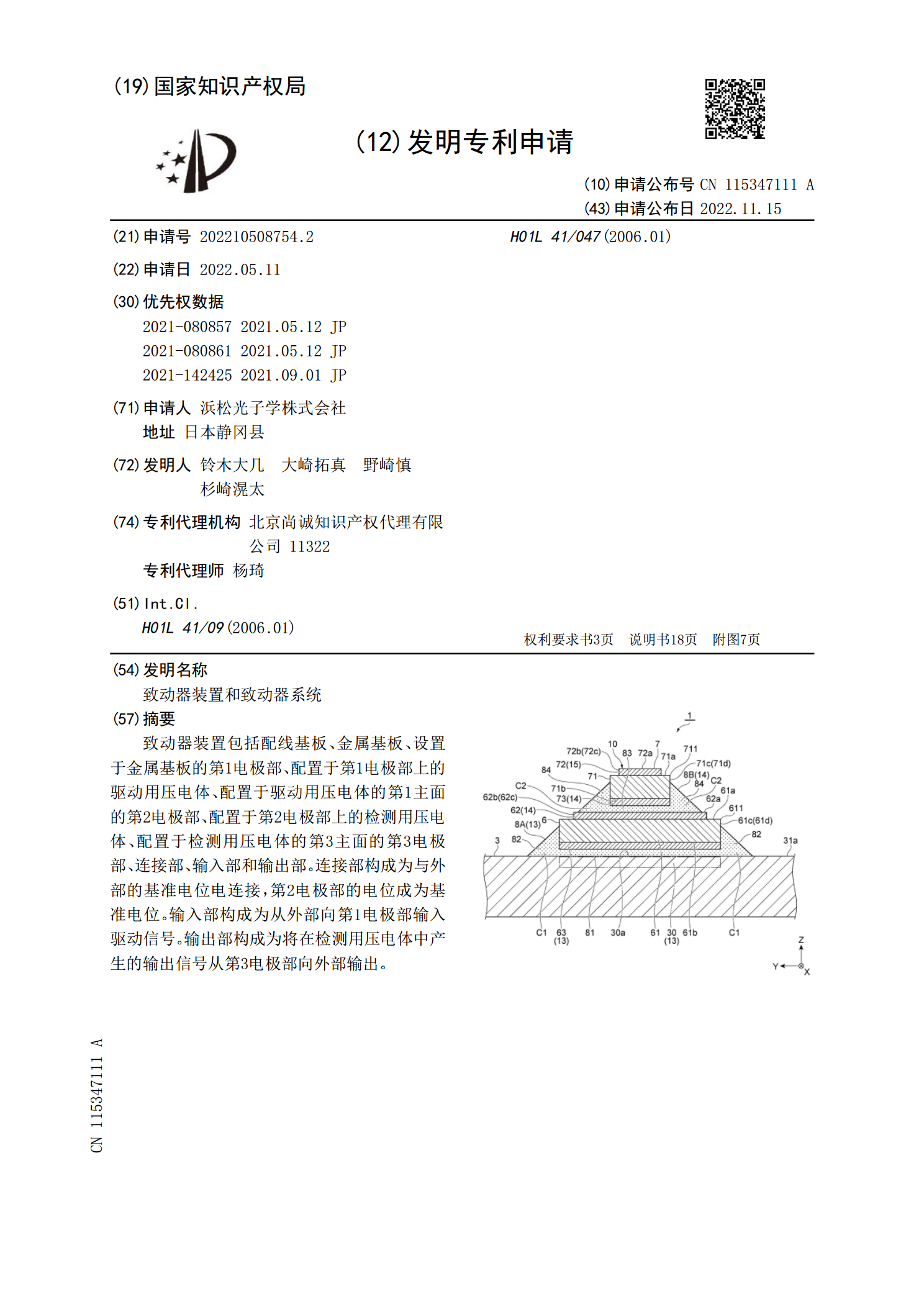
致动器装置和致动器系统.pdf
致动器装置包括配线基板、金属基板、设置于金属基板的第1电极部、配置于第1电极部上的驱动用压电体、配置于驱动用压电体的第1主面的第2电极部、配置于第2电极部上的检测用压电体、配置于检测用压电体的第3主面的第3电极部、连接部、输入部和输出部。连接部构成为与外部的基准电位电连接,第2电极部的电位成为基准电位。输入部构成为从外部向第1电极部输入驱动信号。输出部构成为将在检测用压电体中产生的输出信号从第3电极部向外部输出。
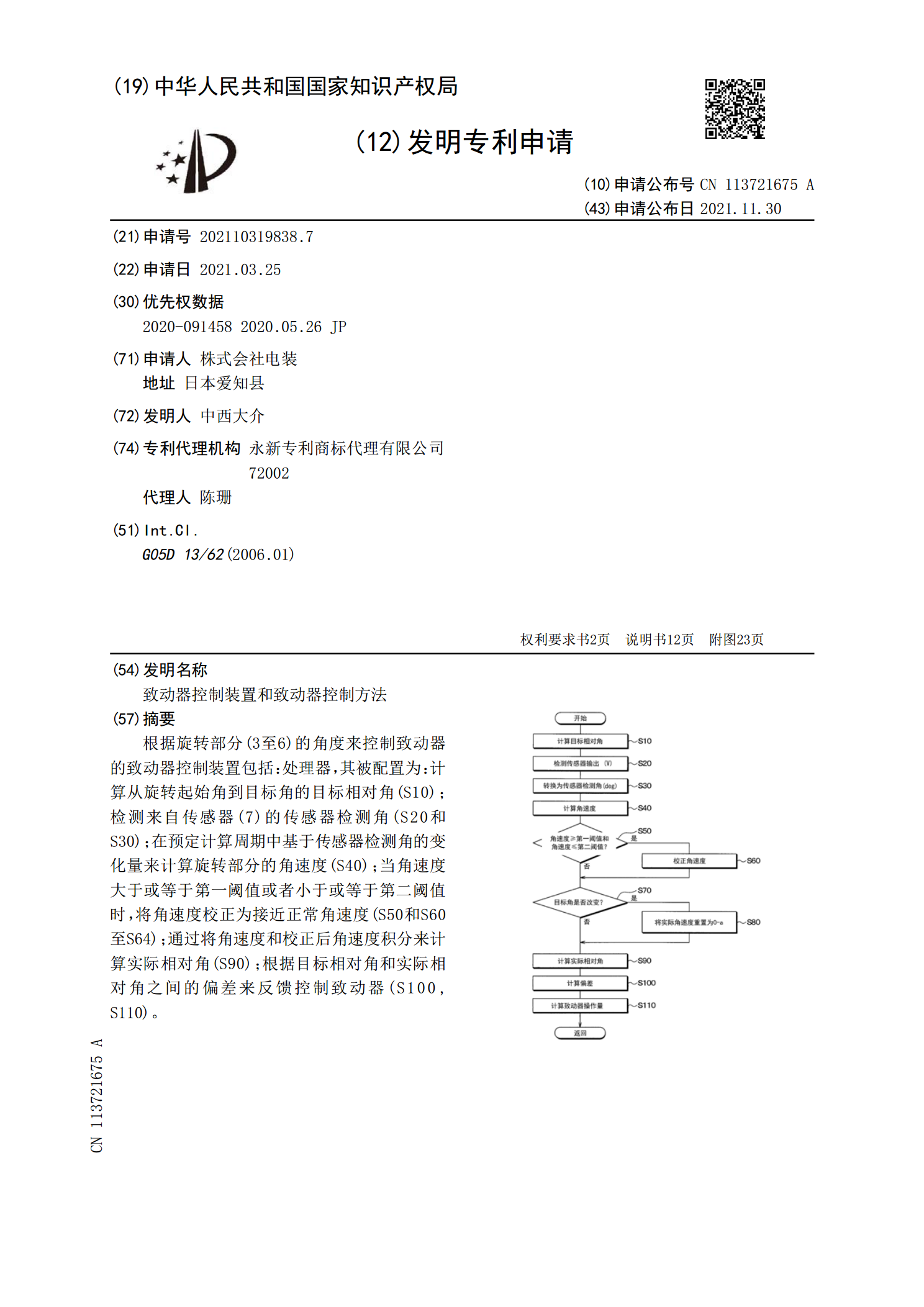
致动器控制装置和致动器控制方法.pdf
根据旋转部分(3至6)的角度来控制致动器的致动器控制装置包括:处理器,其被配置为:计算从旋转起始角到目标角的目标相对角(S10);检测来自传感器(7)的传感器检测角(S20和S30);在预定计算周期中基于传感器检测角的变化量来计算旋转部分的角速度(S40);当角速度大于或等于第一阈值或者小于或等于第二阈值时,将角速度校正为接近正常角速度(S50和S60至S64);通过将角速度和校正后角速度积分来计算实际相对角(S90);根据目标相对角和实际相对角之间的偏差来反馈控制致动器(S100,S110)。

多层致动器及包括该多层致动器的显示装置.pdf
多层致动器及包括该多层致动器的显示装置。提供了一种多层致动器以及包括该多层致动器的具有改进的驱动位移的显示装置,该多层致动器包括例如多个电活性层,其中,所述电活性层包括铁电聚合物,并且所有电活性层的偏振方向大致相同。

致动器和传感器组件.pdf
一种致动器和传感器组件,包括限定一内部室的对应的传感器和致动器外壳。传感器外壳上的夹子结合到致动器外壳,以将传感器和致动器外壳耦合到一起。传感器外壳包括限定腔室的壁。具有传感器的连接器耦合到传感器外壳,其中耦合关系为使传感器延伸到传感器外壳的腔室中。可移动的活塞位于内部室中,且活塞上的管子限定一用于磁体的接收部,该磁体与腔室相邻。活塞坐落在柔性隔板上。致动器轴包括耦合到活塞的一端和耦合到可移动物体的相反一端。致动器外壳中的多个销钉将所述组件安装到支撑架上。传感器感测磁场响应于所述磁体相对于所述传感器的位置