
一种适用于穿墙雷达的目标检测方法.pdf

书生****12


1/10

2/10

3/10
4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种适用于穿墙雷达的目标检测方法.pdf
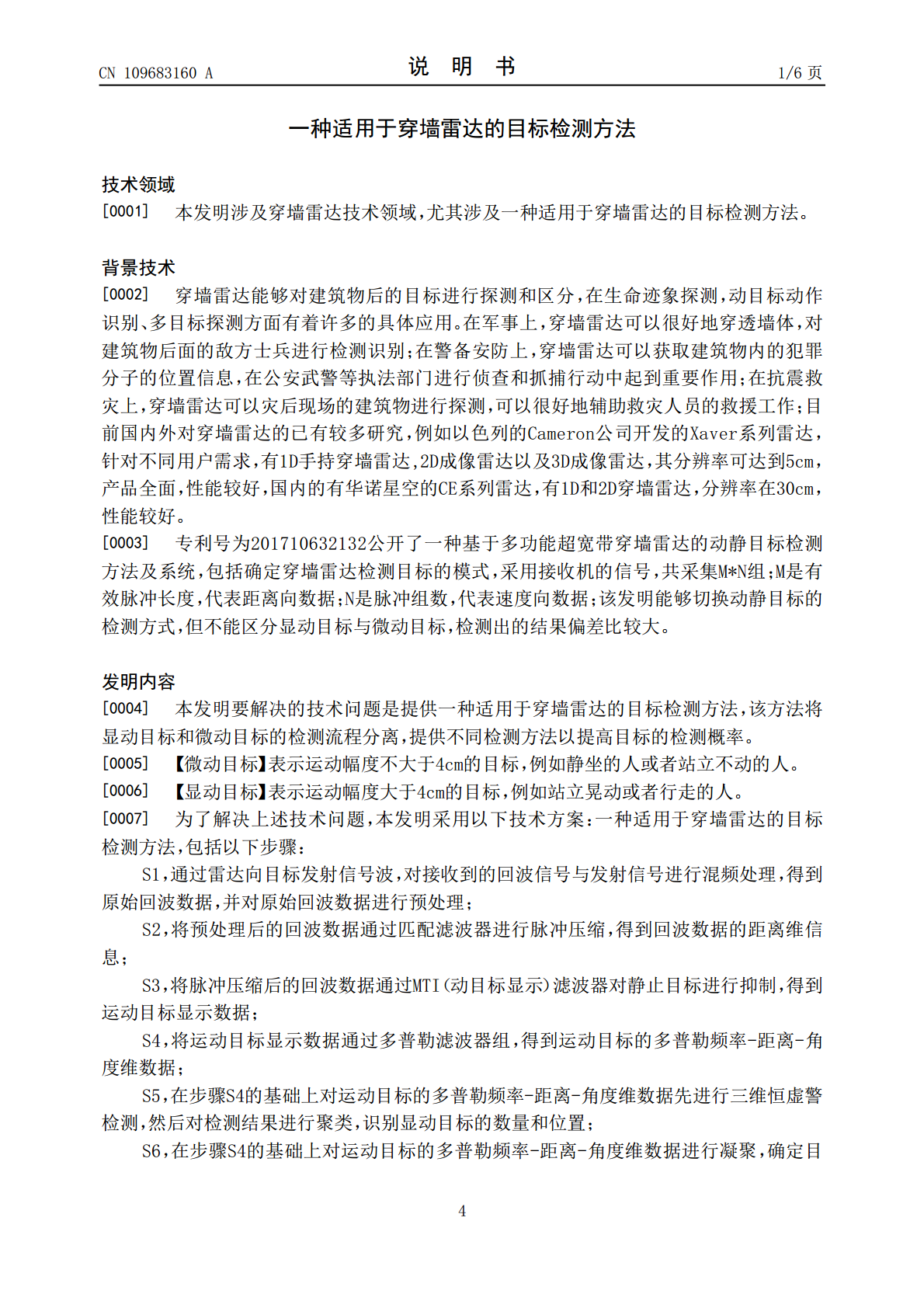
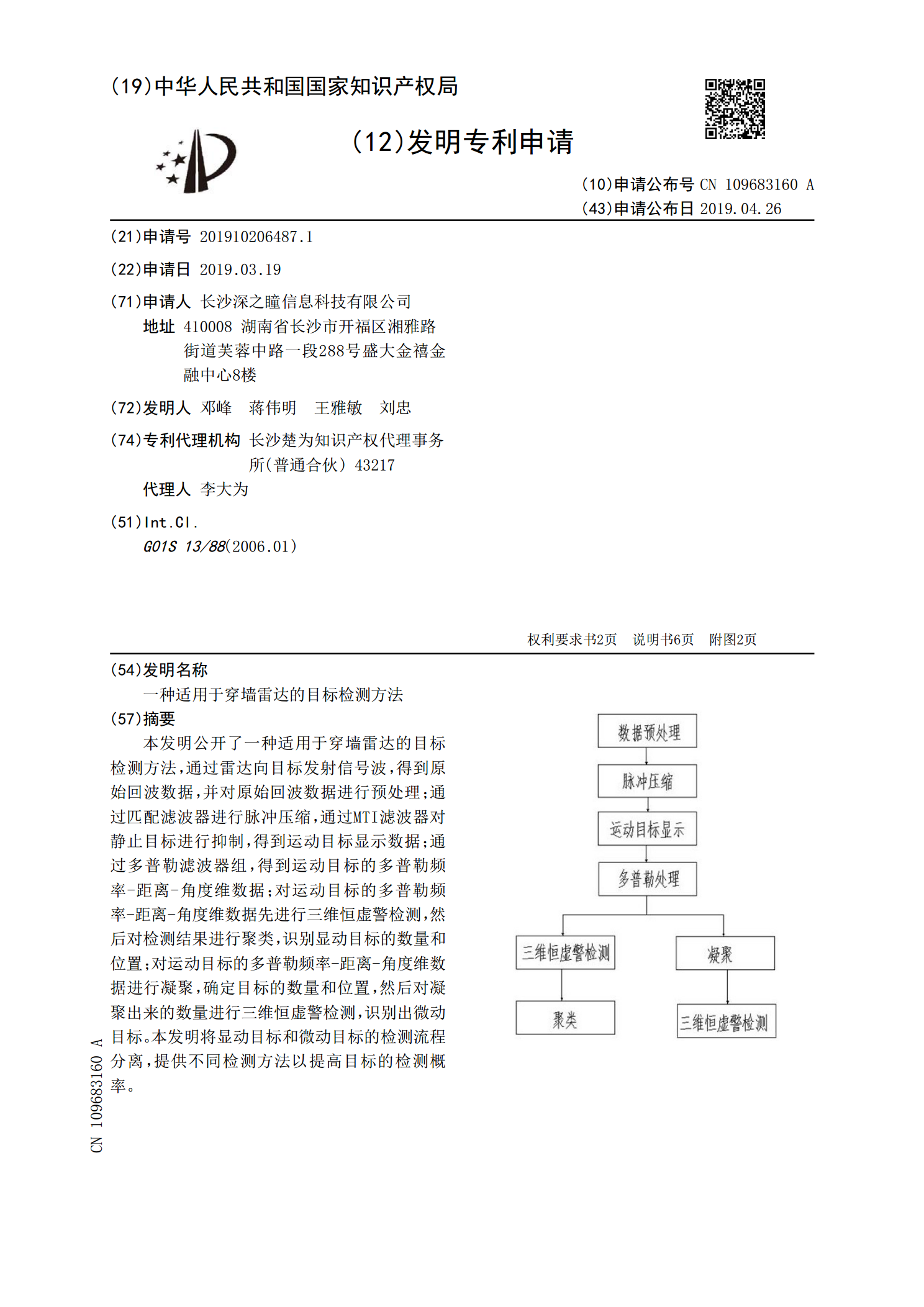
本发明公开了一种适用于穿墙雷达的目标检测方法,通过雷达向目标发射信号波,得到原始回波数据,并对原始回波数据进行预处理;通过匹配滤波器进行脉冲压缩,通过MTI滤波器对静止目标进行抑制,得到运动目标显示数据;通过多普勒滤波器组,得到运动目标的多普勒频率‑距离‑角度维数据;对运动目标的多普勒频率‑距离‑角度维数据先进行三维恒虚警检测,然后对检测结果进行聚类,识别显动目标的数量和位置;对运动目标的多普勒频率‑距离‑角度维数据进行凝聚,确定目标的数量和位置,然后对凝聚出来的数量进行三维恒虚警检测,识别出微动目标。本

一种穿墙雷达微动目标检测方法.pdf
本发明公开了一种穿墙雷达微动目标检测方法,属于雷达检测领域、穿墙雷达检测领域,本发明的方法步骤如下:将采集的中频回波信号进行脉冲压缩处理;根据微动目标的多普勒频移特性设计一窄带滤波器对带外杂波进行抑制;对杂波抑制处理后的信号进行相干积累;将上述处理后的信号进行恒虚警检测;其中脉冲压缩提高信噪比和距离精度;杂波抑制可有效抑制障碍物后方的强杂波;本方法在对微动目标的微多普勒特性的分析的基础上,有针对性地对墙后微动目标的微弱回波进行滤波、放大、提取等处理,最后实现微动目标的有效检测。

一种便携式单手持穿墙雷达目标检测装置及目标检测方法.pdf
本公开提出了一种便携式单手持穿墙雷达目标检测装置及目标检测方法,目标检测装置结构中设置基带板,集成数据的传输通路,大大减少了传输线的设置,同时,按照装置内部件的大小分别设置在TR组件的两侧,合理布设装置内的各个部件,实现减小体积的目的。同时基带板上集成发射通路和接收通路,可以实现提高目标信息的完整性。本公开的目标检测方法,通过结合距离向变换和多普勒向变化数据的处理,首先分析墙后是否存在人体目标,如果存在再判断目标处于运动状态或者静止状态,对于运动状态的目标,判断目标靠近雷达或者远离雷达,基于一发一收的穿墙
一种基于穿墙雷达的动静人体目标自适应检测方法及系统.pdf
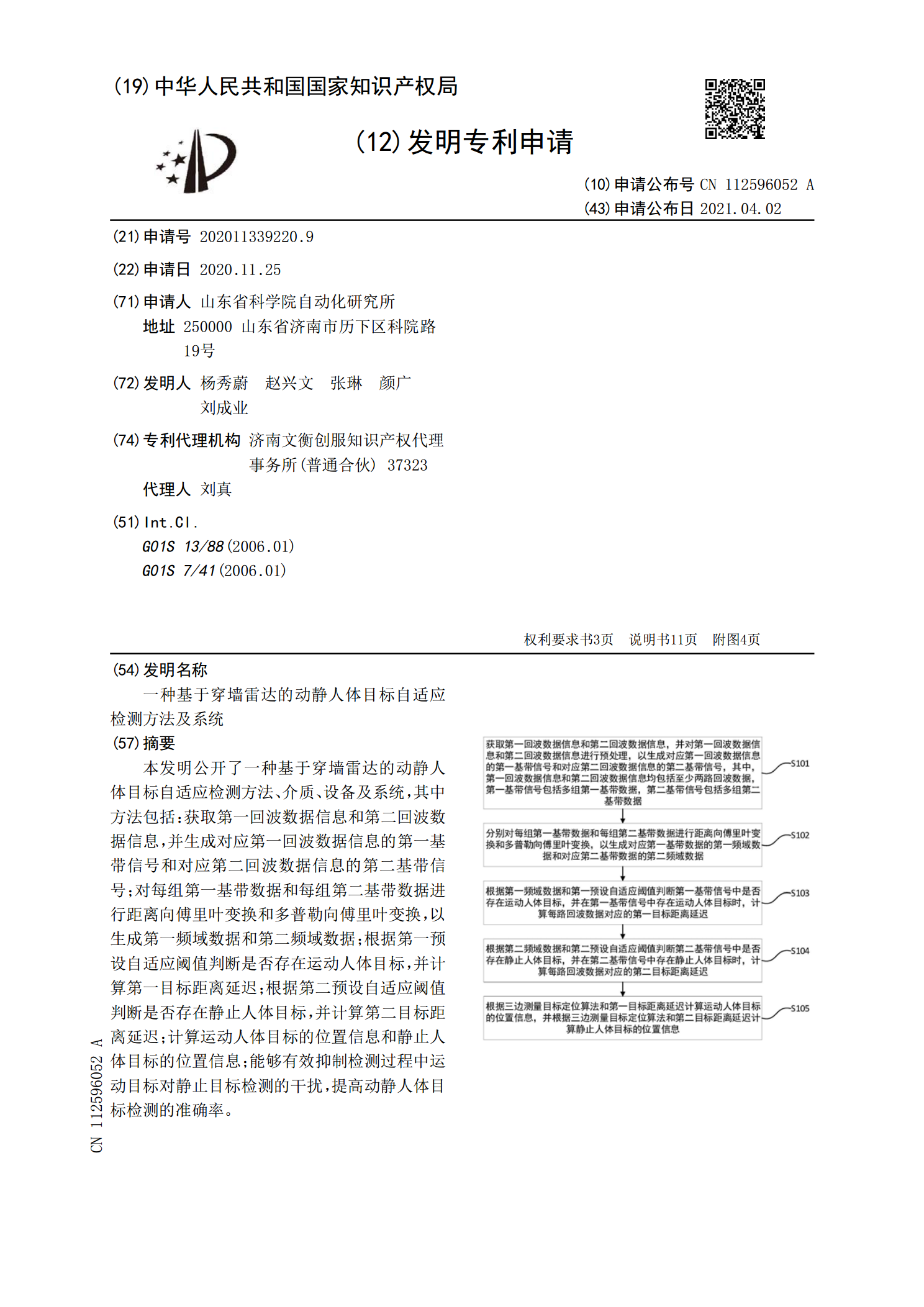
本发明公开了一种基于穿墙雷达的动静人体目标自适应检测方法、介质、设备及系统,其中方法包括:获取第一回波数据信息和第二回波数据信息,并生成对应第一回波数据信息的第一基带信号和对应第二回波数据信息的第二基带信号;对每组第一基带数据和每组第二基带数据进行距离向傅里叶变换和多普勒向傅里叶变换,以生成第一频域数据和第二频域数据;根据第一预设自适应阈值判断是否存在运动人体目标,并计算第一目标距离延迟;根据第二预设自适应阈值判断是否存在静止人体目标,并计算第二目标距离延迟;计算运动人体目标的位置信息和静止人体目标的位置

基于穿墙雷达的动静人体目标自适应检测方法及系统.pdf
本发明公开了基于穿墙雷达的动静人体目标自适应检测方法及系统,涉及雷达检测技术领域。本发明包括以下步骤:SS01通过穿墙雷达和射频模块的混频和放大后得到基带信号;SS02采集32组数据并经过距离向傅里叶变换和多普勒向傅里叶变换,取模后进行对应距离单元上的多普勒向的累加;SS03运动人体的判断;SS04静止人体距离单元的转换;SS05静止人体的判断;SS06位置确定。本发明通过动目标检测算法和静目标检测算法能够分别对运动人体目标和静止人体目标进行检测,一方面提高了检测准确率,另一方面有效抑制了动目标对静止人体