
基于逆Radon变换的人体微多普勒分量提取方法.pdf

An****70

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于逆Radon变换的人体微多普勒分量提取方法.pdf
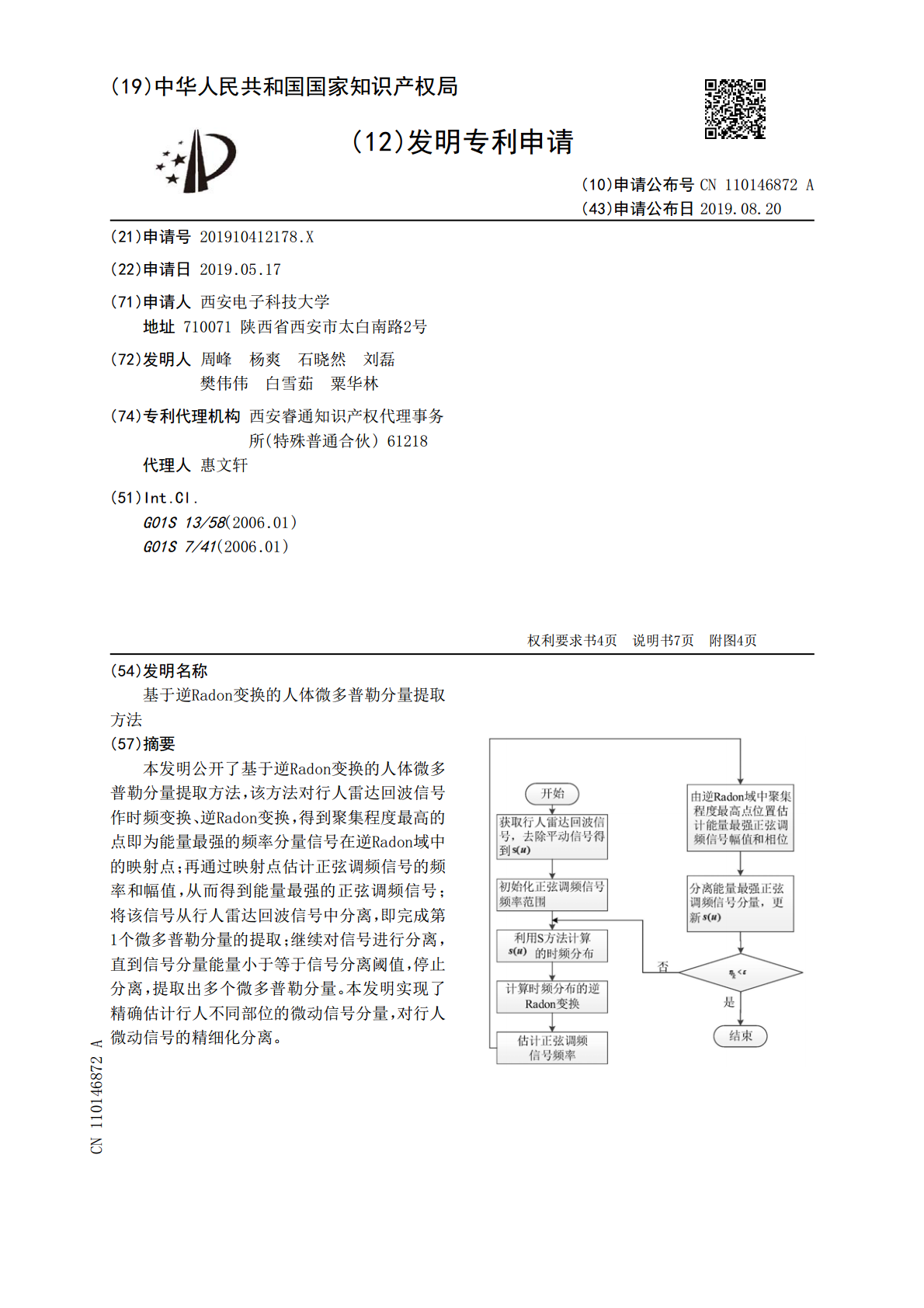
本发明公开了基于逆Radon变换的人体微多普勒分量提取方法,该方法对行人雷达回波信号作时频变换、逆Radon变换,得到聚集程度最高的点即为能量最强的频率分量信号在逆Radon域中的映射点;再通过映射点估计正弦调频信号的频率和幅值,从而得到能量最强的正弦调频信号;将该信号从行人雷达回波信号中分离,即完成第1个微多普勒分量的提取;继续对信号进行分离,直到信号分量能量小于等于信号分离阈值,停止分离,提取出多个微多普勒分量。本发明实现了精确估计行人不同部位的微动信号分量,对行人微动信号的精细化分离。

基于Radon变换与拉普拉斯算子的微多普勒抑制方法.pdf
基于Radon变换与拉普拉斯算子的微多普勒抑制方法,涉及外辐射源雷达信号处理技术领域,针对现有技术中在刚体信号能量较低的情况下,或者信噪比较低的情况时不能有效的检测出刚体信号成分的问题,本发明利用了刚体信号在时频域中呈现为直线的特点,利用图像直线检测工具,radon变换进行刚体信号的检测。本发明利用了拉普拉斯算子,对radon变换域中的峰值进行了非刚体成分的排除,即只有足够陡峭的峰值点才被认为是极值点。通过这种方式,可以在刚体信号能量较低的情况下,或者信噪比较低的情况还是能有效的检测出刚体信号成分并相应的

一种基于质心计算的目标微多普勒分量提取方法.pdf
本发明提供一种基于质心计算的目标微多普勒分量提取的方法,包括目标运动I,Q回波信号的采集,数据分段,正交化处理,复数化处理,FFT变换,设置阈值去除噪底,通过估算目标频带范围去除带外噪声,并求取频谱质心,得到质心后与原复数化信号进行混频,即可去除目标平动产生的多普勒量的干扰,得到目标微动的特征。本发明计算简便,可操作性强,精度高,实时性高,有效克服了现有算法实时性低,装置复杂,先验信息要求高的不足。

一种基于经验模态分解提取信号微多普勒调制分量的方法.pdf
本发明涉及信号处理技术领域,公开了一种基于经验模态分解提取信号微多普勒调制分量的方法,首先利用经验模态分解方法将回波中的杂波分量自适应的抑制,然后利用循环移位算法将回波中的平动分量移到多普勒频率为零处,最后再次利用经验模态分解算法将平动分量和微多普勒调制分量自动区分,本发明对微多普勒调制的提取不需要人工参与并且能够保持回波中的多普勒结构信息,从而提升依据微多普勒调制特性进行目标分类识别的正确率。
Radon变换.pdf
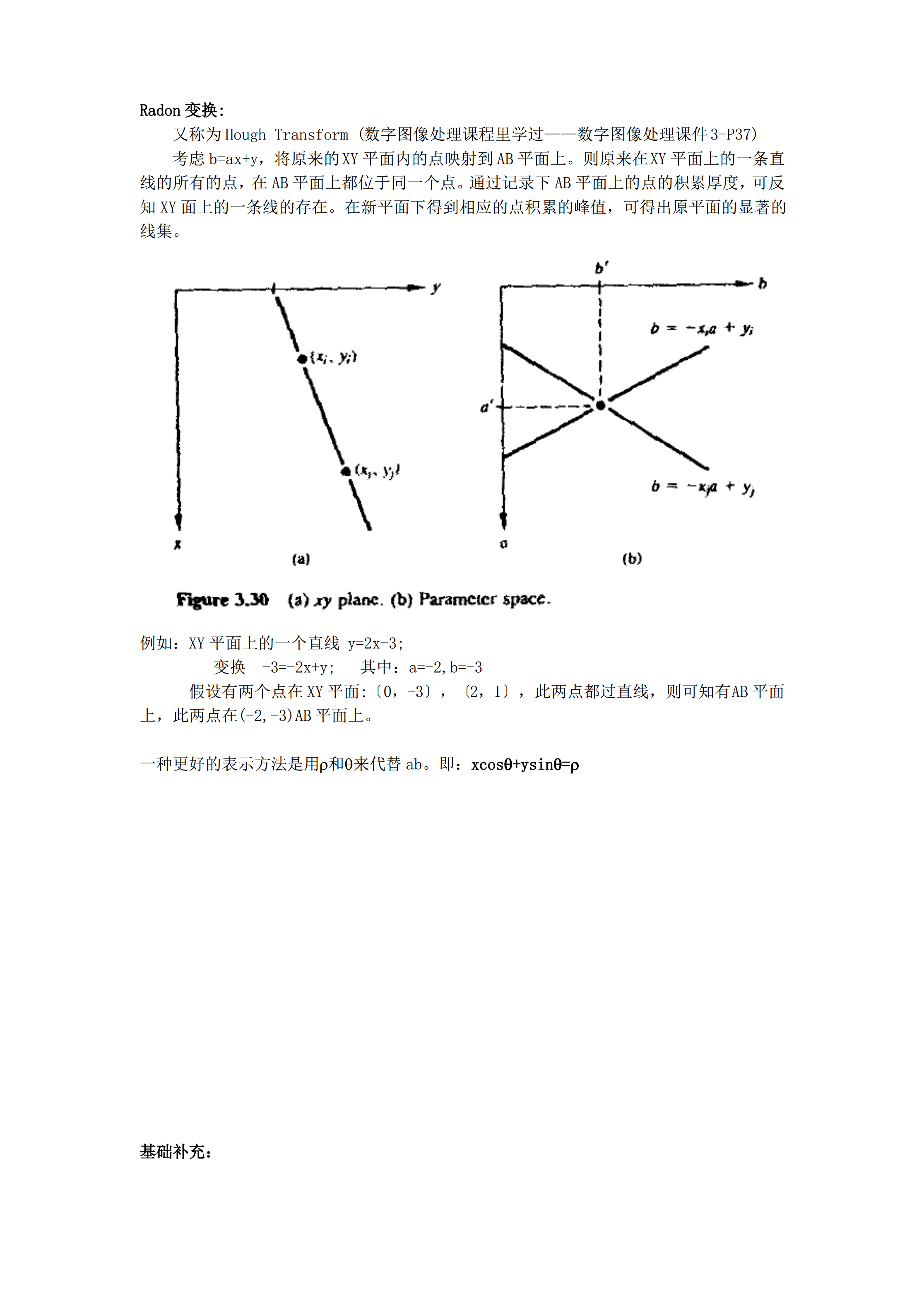
Radon变换:又称为HoughTransform(数字图像处理课程里学过——数字图像处理课件3-P37)考虑b=ax+y,将原来的XY平面内的点映射到AB平面上。则原来在XY平面上的一条直线的所有的点,在AB平面上都位于同一个点。通过记录下AB平面上的点的积累厚度,可反知XY面上的一条线的存在。在新平面下得到相应的点积累的峰值,可得出原平面的显著的线集。例如:XY平面上的一个直线y=2x-3;变换-3=-2x+y;其中:a=-2,b=-3假设有两个点在XY平面:〔0,-3〕,〔2,1〕,此两点都过直线,