
基于车载毫米波雷达联合SVM和CNN多目标分类方法.pdf

猫巷****忠娟


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于车载毫米波雷达联合SVM和CNN多目标分类方法.pdf
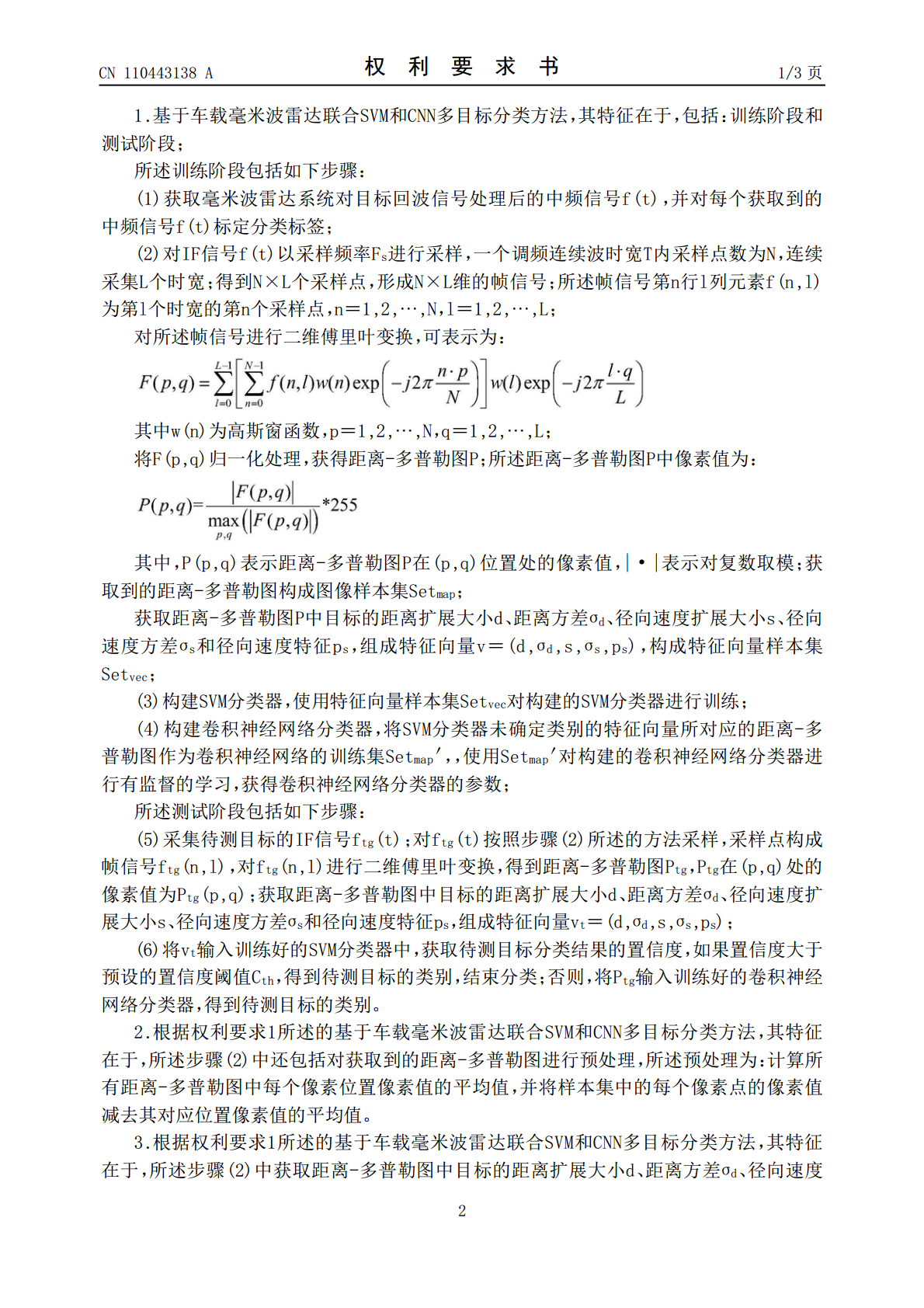
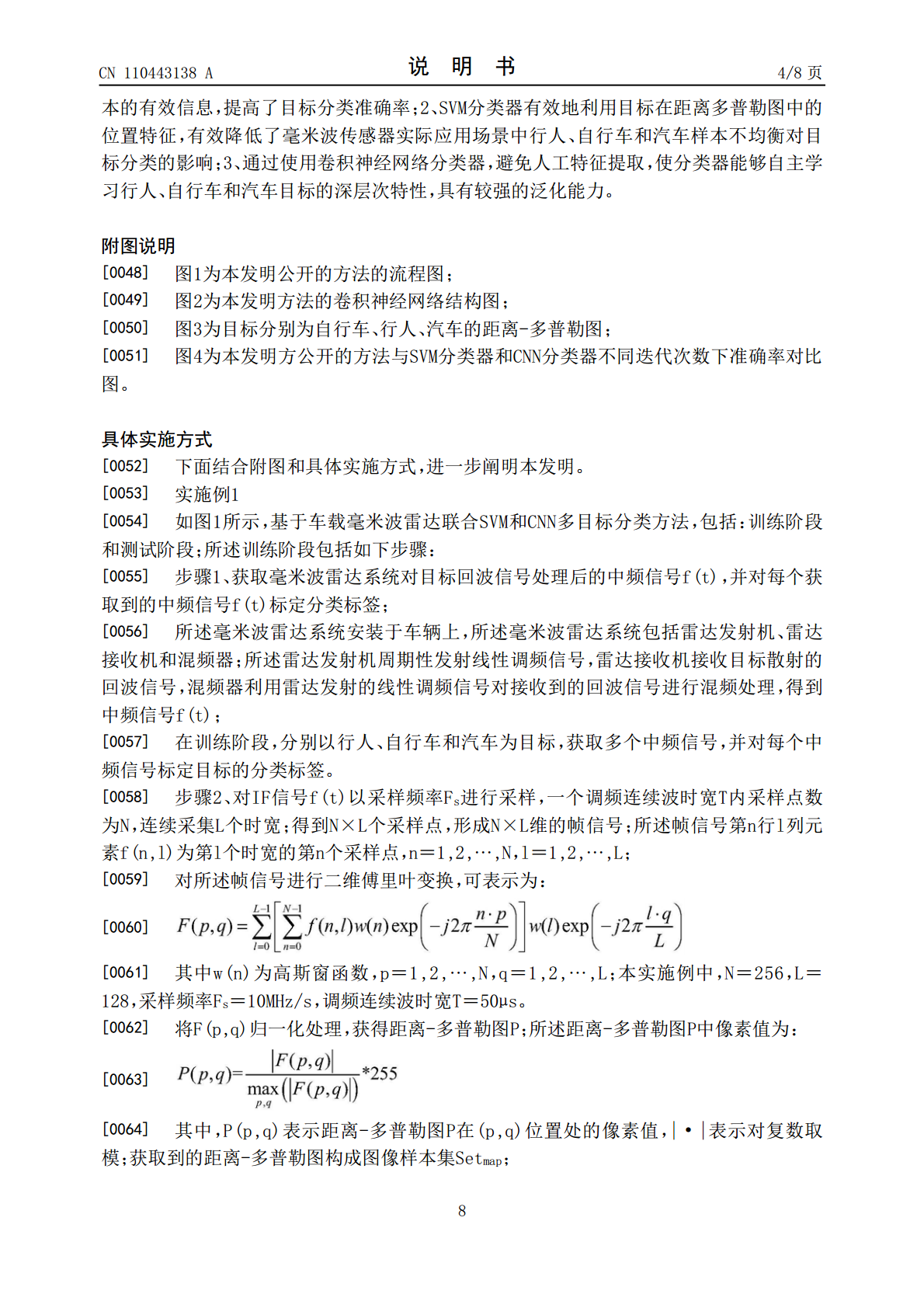
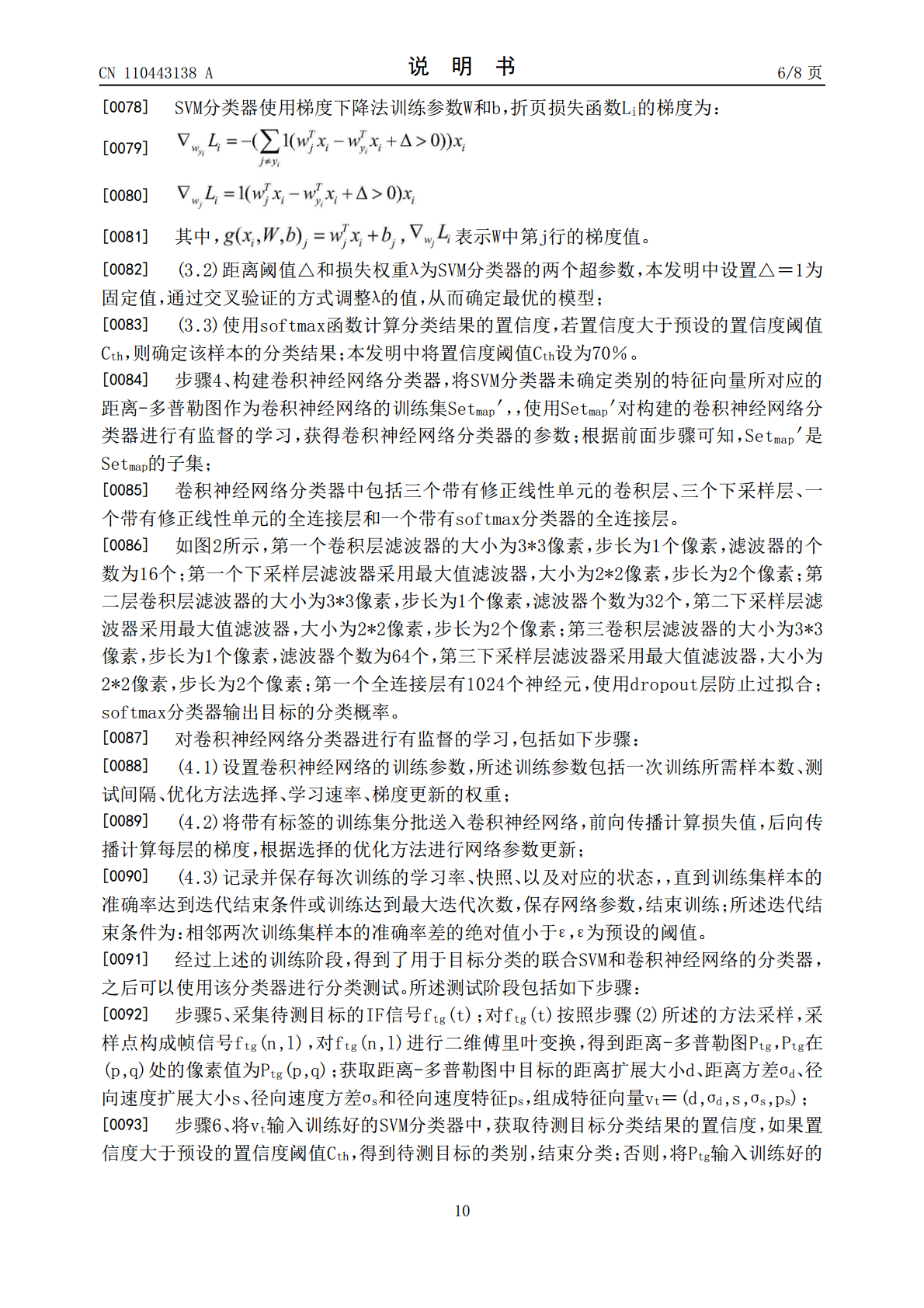
本发明公开了一种基于车载毫米波雷达联合SVM和CNN多目标分类方法,首先对雷达获取到的不同目标的IF信号进行采样,转换为帧信号,对帧信号进行二维傅里叶变换,归一化后得到距离‑多普勒图,提取距离‑多普勒图中的特征向量,构建样本集;其次构建并训练SVM分类器,得到能够进行初步分类的SVM分类器;最后构建并训练卷积神经网络分类器,对SVM分类器无法分类的样本进行进一步分类,得到待测目标的分类结果。该方法联合SVM分类器和CNN分类器,弥补了CNN分类器对位置信息的不敏感,充分利用了样本的有效信息,提高了目标分类

基于车载毫米波雷达的多目标检测方法和系统.pdf
本发明涉及目标检测技术领域,提供一种基于车载毫米波雷达的多目标检测方法和系统。方法包括:根据状态模型构建多目标检测的状态转移函数;根据量测模型构建多目标检测的似然函数;以所述多目标观测集合为输入量,通过粒子滤波器得到多目标检测结果;所述粒子滤波器是基于所述状态转移函数和所述似然函数构建的。本发明通过随机有限集框架下的状态转移函数和似然函数构建粒子滤波器,能够有效避免滤波过程中由于数据关联产生的干扰,从而使得多目标检测任务在具有杂波和误检的场景下,仍然可以得到准确的检测结果。

一种基于车载毫米波雷达的多目标分类方法.pdf
本发明公开了一种基于车载毫米波雷达的多目标分类方法,首先对雷达获取到的不同目标的IF信号进行采样,转换为帧信号,对帧信号进行二维傅里叶变换,归一化后得到距离‑多普勒图;由此构建距离‑多普勒图样本集;其次构建混合级联神经网络分类器,用距离‑多普勒图样本集作为输入对混合级联神经网络分类器进行有监督的学习,获得各支路上分类器的网络参数,最后得到一个能够进行多目标分类的分类器,对雷达获取的目标IF信号进行分类。该方法通过混合级联分类器,克服了级联分类器应用场景的局限性,能够对多种目标类别进行分类。
基于标签的车载毫米波雷达多目标检测方法和系统.pdf
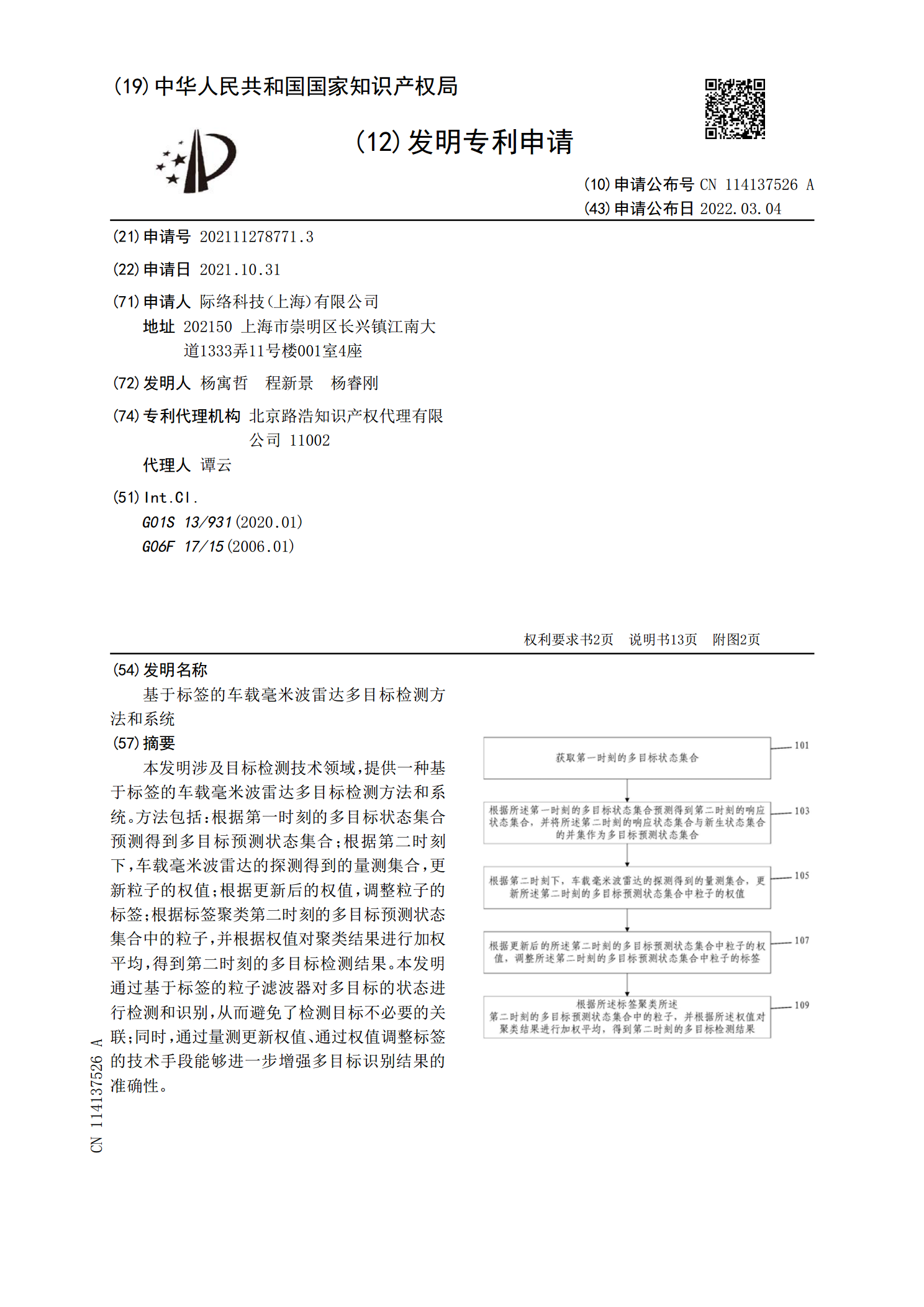
本发明涉及目标检测技术领域,提供一种基于标签的车载毫米波雷达多目标检测方法和系统。方法包括:根据第一时刻的多目标状态集合预测得到多目标预测状态集合;根据第二时刻下,车载毫米波雷达的探测得到的量测集合,更新粒子的权值;根据更新后的权值,调整粒子的标签;根据标签聚类第二时刻的多目标预测状态集合中的粒子,并根据权值对聚类结果进行加权平均,得到第二时刻的多目标检测结果。本发明通过基于标签的粒子滤波器对多目标的状态进行检测和识别,从而避免了检测目标不必要的关联;同时,通过量测更新权值、通过权值调整标签的技术手段能够

车载毫米波雷达系统多目标检测方法.pdf
一种车载毫米波雷达系统多目标检测方法,属于车载雷达领域,用于解决车载毫米波雷达多目标检测存在的目标检测不准确以及目标漏检的问题,技术要点是:发射周期性的FMCW与CW的组合波形;接收回波信号,并对接收到的回波信号进行快速傅里叶变换;使用频率聚类算法,求得CW波形回波信号的多普勒频率矩阵,并计算出相对速度矩阵;在FMCW上下扫频中也使用频率凝聚算法,获得上下扫频的频率值,并解算出目标的速度矩阵和距离矩阵。效果是:车载毫米波雷达多目标检测存在的目标检测更准确。