
用于处理雷达数据的方法和装置.pdf

fa****楠吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于处理雷达数据的方法和装置.pdf
一种用于处理雷达数据的方法包括:基于根据雷达数据生成的多普勒图来预测感兴趣角(AOI)区域;基于预测的AOI区域来调整转向信息,该转向信息被用于识别雷达数据;以及基于调整后的转向信息来确定与雷达数据相对应的到达方向(DOA)信息。一种雷达数据处理装置包括雷达传感器和处理器,该雷达传感器用于感测雷达数据,该处理器用于:基于根据雷达数据生成的多普勒图来预测AOI区域;基于预测的AOI区域来调整转向信息,该转向信息被用于识别雷达数据;以及基于调整后的转向信息来确定与雷达数据相对应的DOA信息。
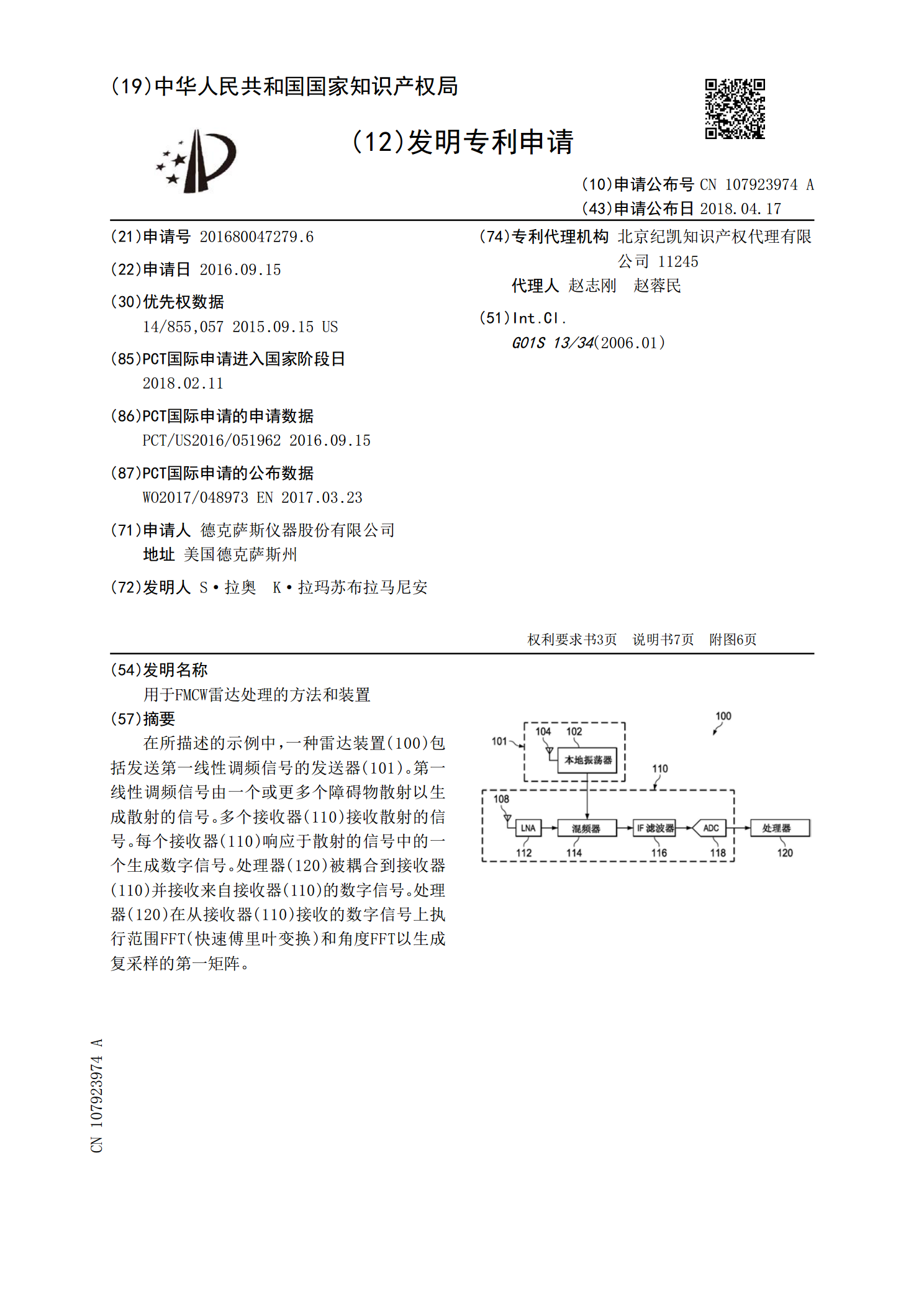
用于FMCW雷达处理的方法和装置.pdf
在所描述的示例中,一种雷达装置(100)包括发送第一线性调频信号的发送器(101)。第一线性调频信号由一个或更多个障碍物散射以生成散射的信号。多个接收器(110)接收散射的信号。每个接收器(110)响应于散射的信号中的一个生成数字信号。处理器(120)被耦合到接收器(110)并接收来自接收器(110)的数字信号。处理器(120)在从接收器(110)接收的数字信号上执行范围FFT(快速傅里叶变换)和角度FFT以生成复采样的第一矩阵。
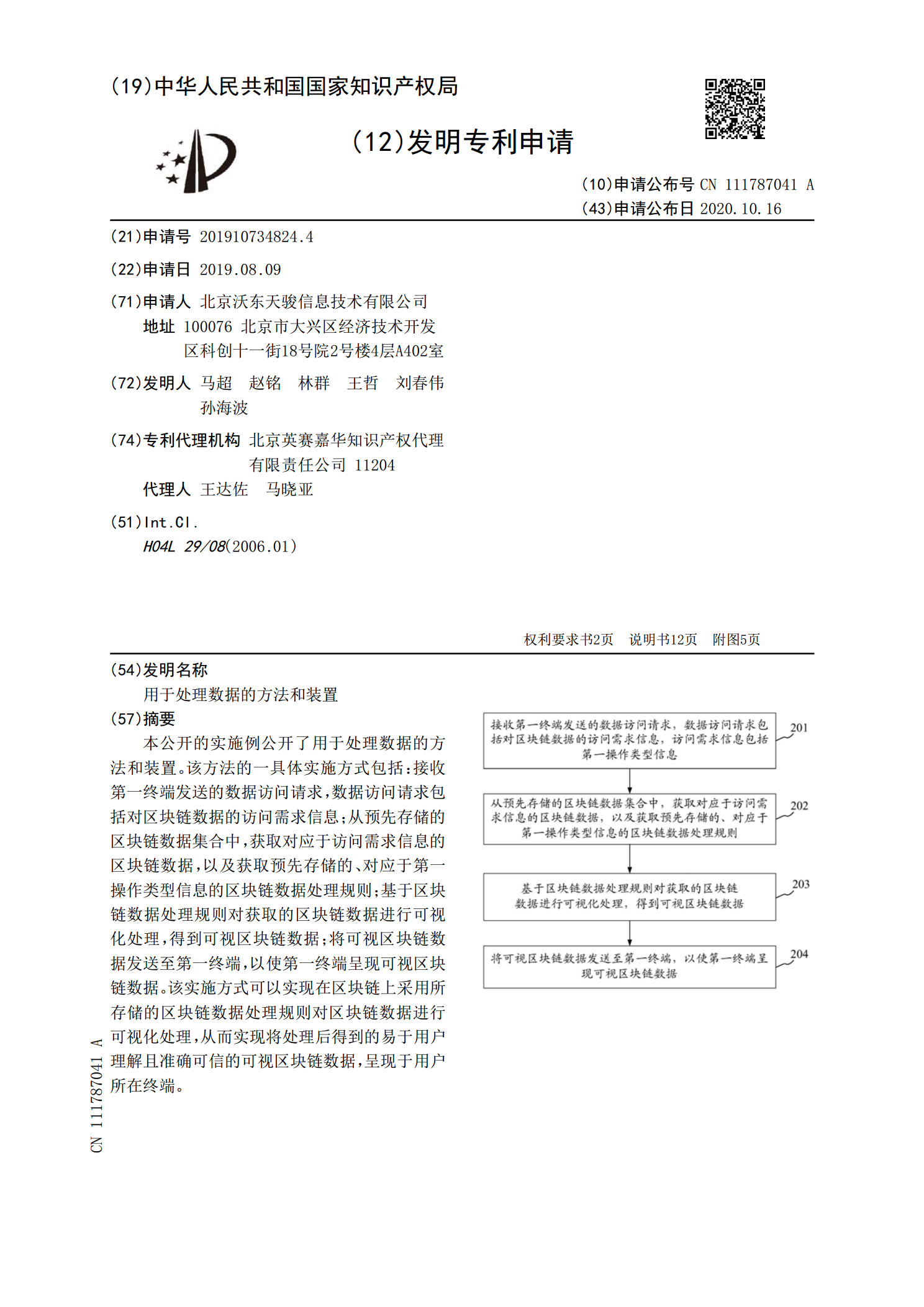
用于处理数据的方法和装置.pdf
本公开的实施例公开了用于处理数据的方法和装置。该方法的一具体实施方式包括:接收第一终端发送的数据访问请求,数据访问请求包括对区块链数据的访问需求信息;从预先存储的区块链数据集合中,获取对应于访问需求信息的区块链数据,以及获取预先存储的、对应于第一操作类型信息的区块链数据处理规则;基于区块链数据处理规则对获取的区块链数据进行可视化处理,得到可视区块链数据;将可视区块链数据发送至第一终端,以使第一终端呈现可视区块链数据。该实施方式可以实现在区块链上采用所存储的区块链数据处理规则对区块链数据进行可视化处理,从而

用于处理数据的方法和装置.pdf
本申请实施例公开了用于处理数据的方法和装置。该方法的一具体实施方式包括:采集视频数据并播放目标音频数据;对于该视频数据中的帧,确定采集到该帧时已播放的目标音频数据的数据量,将该数据量对应的播放时长确定为该帧的时间戳;将包含时间戳的视频数据和该目标音频数据中已播放的数据进行存储。该实施方式提升了所录制的配乐视频的音视频同步效果。

用于处理数据的装置和方法.pdf
一种用于处理数据的装置和方法。一种在显示装置中渲染图像的方法包括:获取关于重复形状的信息,所述重复形状代表图像中所包括的一个或多个几何形状的至少一部分,并且在所述一个或多个几何形状中重复地出现;获取渲染信息,所述渲染信息代表基于关于所述重复形状的信息来渲染所述一个或多个几何形状的方法;和,基于关于所述重复形状的信息和所述渲染信息,渲染所述一个或多个几何形状。