
基于机器学习的GNSS定位方法及装置.pdf

一只****呀9


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于机器学习的GNSS定位方法及装置.pdf
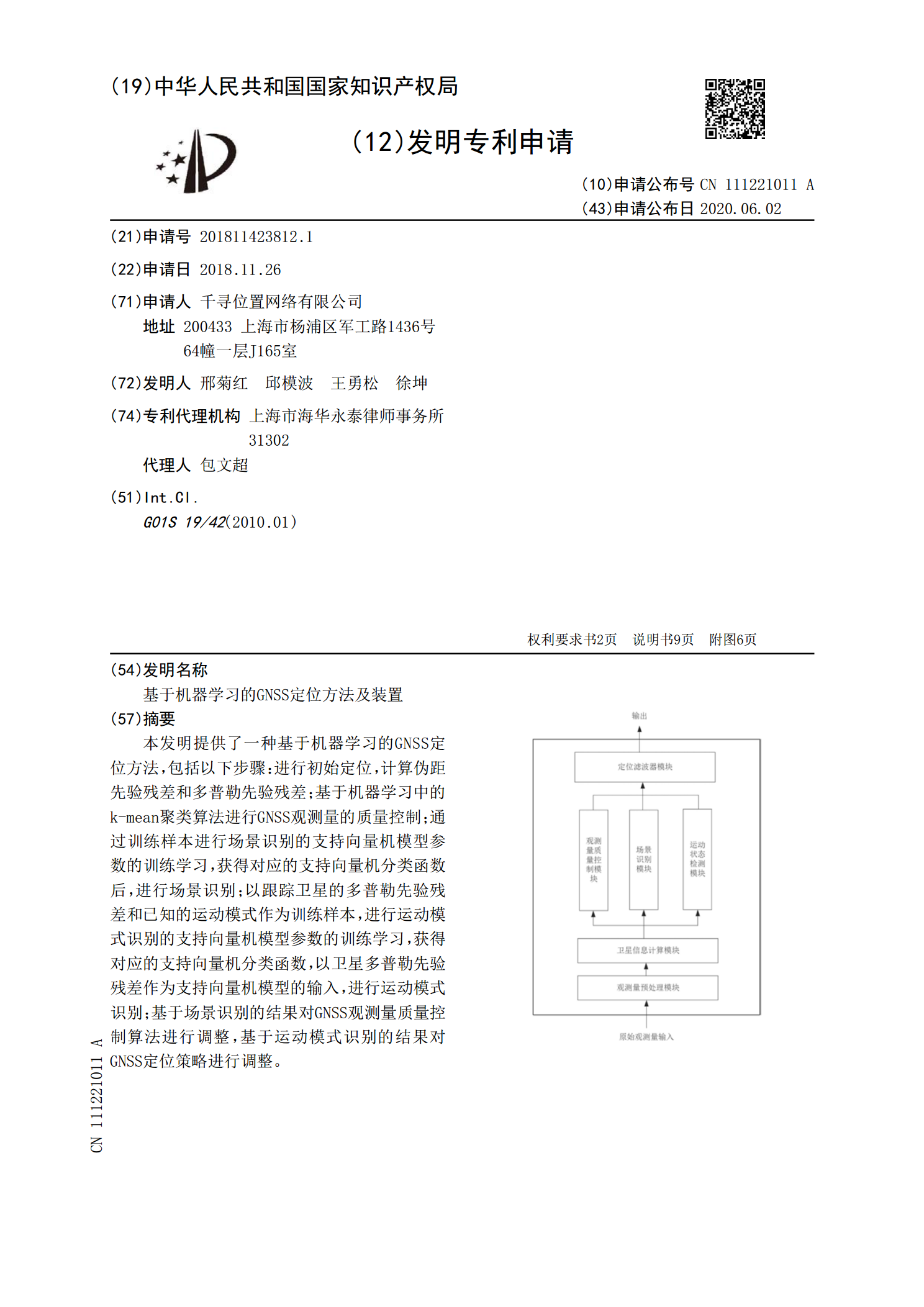
本发明提供了一种基于机器学习的GNSS定位方法,包括以下步骤:进行初始定位,计算伪距先验残差和多普勒先验残差;基于机器学习中的k‑mean聚类算法进行GNSS观测量的质量控制;通过训练样本进行场景识别的支持向量机模型参数的训练学习,获得对应的支持向量机分类函数后,进行场景识别;以跟踪卫星的多普勒先验残差和已知的运动模式作为训练样本,进行运动模式识别的支持向量机模型参数的训练学习,获得对应的支持向量机分类函数,以卫星多普勒先验残差作为支持向量机模型的输入,进行运动模式识别;基于场景识别的结果对GNSS观测量

基于GNSS/ODO的机器人双轮差速定位方法.pdf
本发明属于机器人技术领域,特别涉及一种机器人定位方法。基于GNSS/ODO的机器人双轮差速定位方法,步骤为:A.初始化机器人,利用GNSS获取初始时刻机器人的位姿信息;B.利用双轮里程计定位算法对机器人n+1时刻的全局位姿信息进行推算;C.判断当前时刻是否为设定的GNSS数据修正时刻,如果是,则执行D步骤;如果不是,则执行E步骤;D.根据步骤B中推算得到的n+1时刻的无人车位姿状态,进行卡尔曼滤波“预测‑修正”;E.仅进行D步骤中的卡尔曼滤波预测,而不做修正;F.输出滤波后的机器人的全局位姿信息。利用本发

一种基于机器视觉的工件定位方法及装置.pdf
本发明涉及智能机器人技术领域,具体涉及一种基于机器视觉的工件定位方法及装置,首先确定目标工件,采集Kinect相机拍摄的图像,检测所述图像中包含所述目标工件图像的预测框;进而根据所述预测框的回归坐标确定所述目标工件的轮廓,以及目标工件中心点的二维坐标;接着获取所述Kinect相机的标定参数,根据所述标定参数和所述目标工件中心点的二维坐标得出目标工件中心点的三维坐标;最后将所述目标工件的轮廓和所述目标工件中心点的三维坐标作为目标工件的定位结果,本发明可以对工件进行准确的识别与定位。
基于机器学习的疾病预测方法及装置.pdf
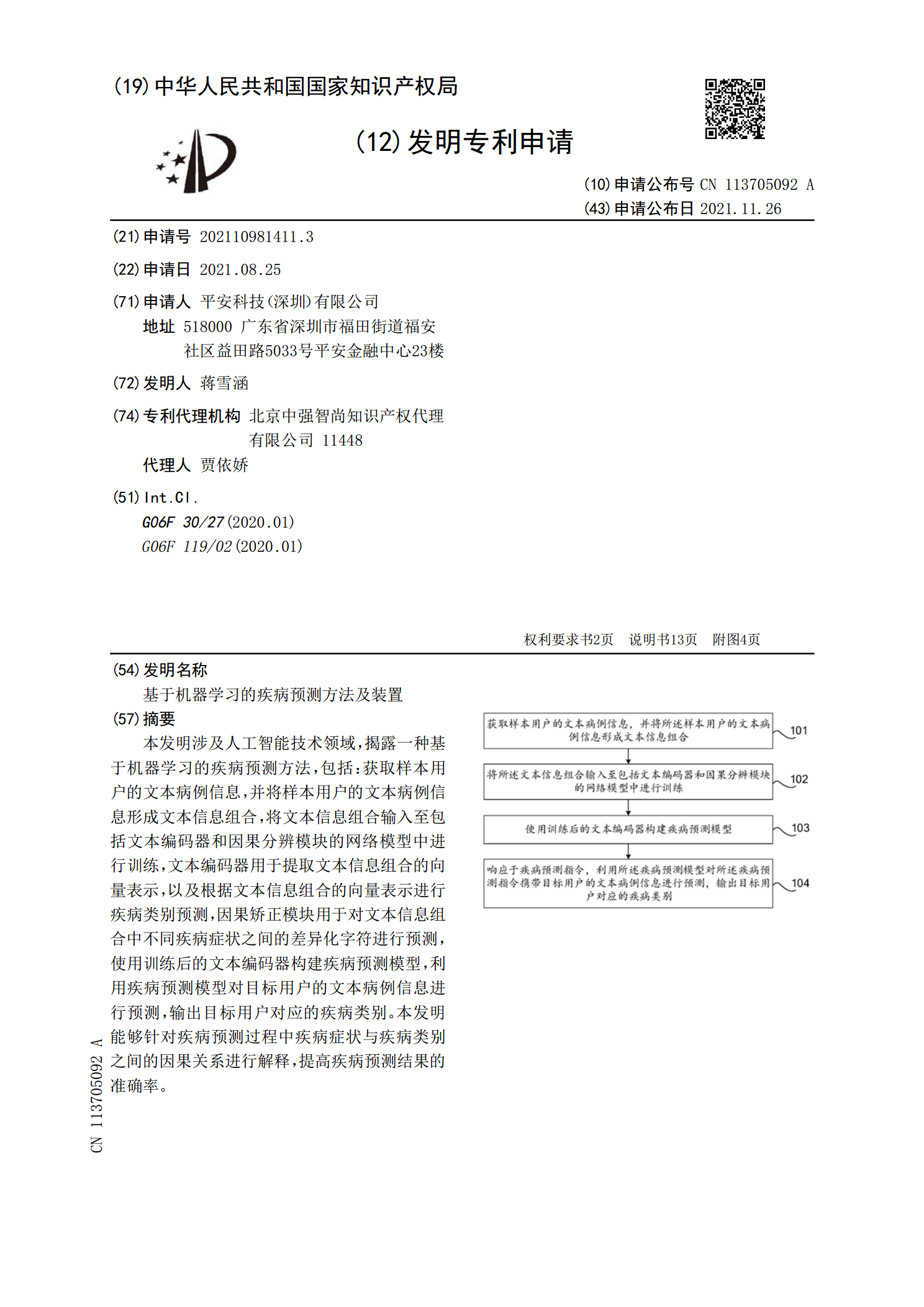
本发明涉及人工智能技术领域,揭露一种基于机器学习的疾病预测方法,包括:获取样本用户的文本病例信息,并将样本用户的文本病例信息形成文本信息组合,将文本信息组合输入至包括文本编码器和因果分辨模块的网络模型中进行训练,文本编码器用于提取文本信息组合的向量表示,以及根据文本信息组合的向量表示进行疾病类别预测,因果矫正模块用于对文本信息组合中不同疾病症状之间的差异化字符进行预测,使用训练后的文本编码器构建疾病预测模型,利用疾病预测模型对目标用户的文本病例信息进行预测,输出目标用户对应的疾病类别。本发明能够针对疾病预
基于V2X和GNSS的混合定位方法及装置.pdf
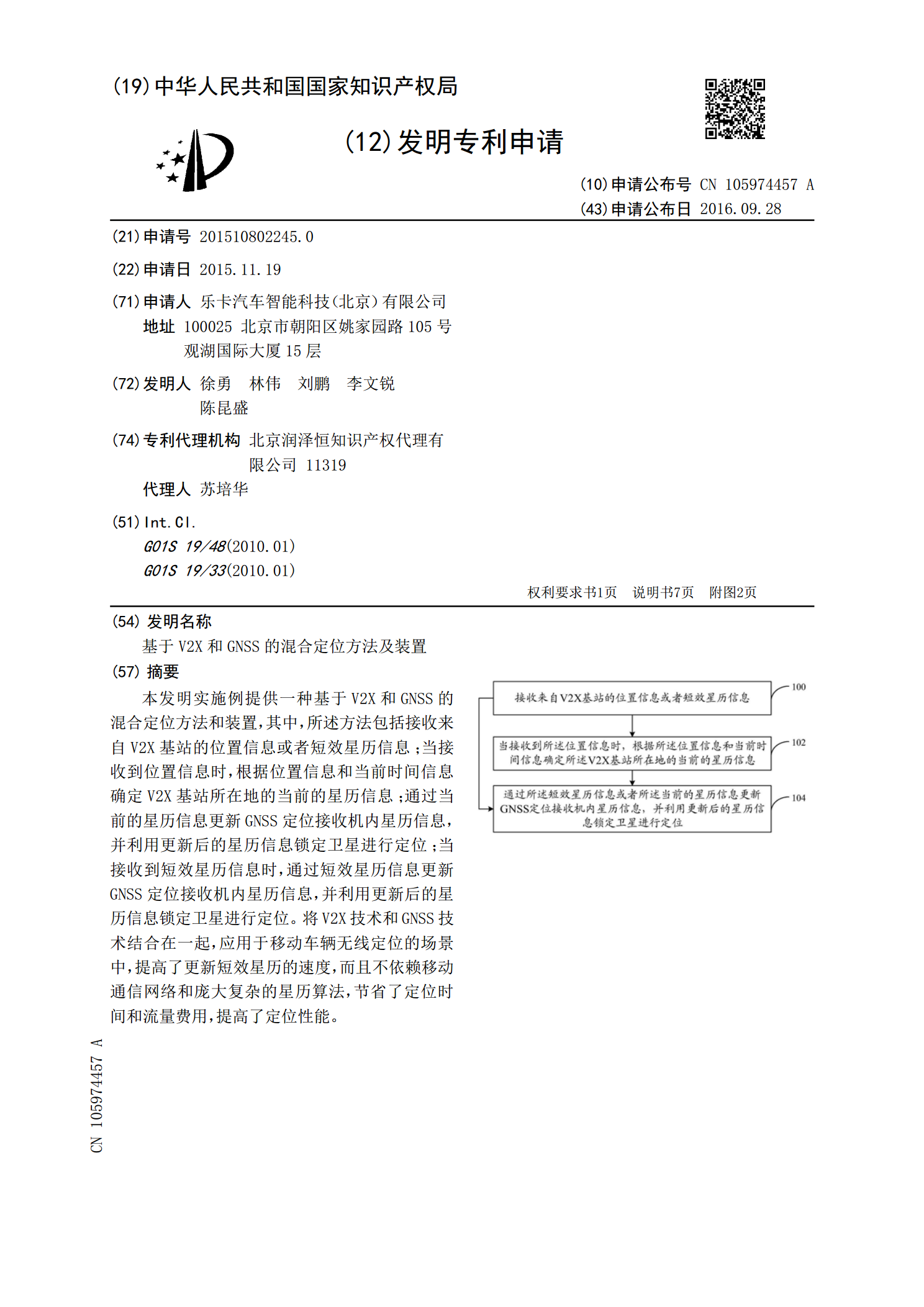
本发明实施例提供一种基于V2X和GNSS的混合定位方法和装置,其中,所述方法包括接收来自V2X基站的位置信息或者短效星历信息;当接收到位置信息时,根据位置信息和当前时间信息确定V2X基站所在地的当前的星历信息;通过当前的星历信息更新GNSS定位接收机内星历信息,并利用更新后的星历信息锁定卫星进行定位;当接收到短效星历信息时,通过短效星历信息更新GNSS定位接收机内星历信息,并利用更新后的星历信息锁定卫星进行定位。将V2X技术和GNSS技术结合在一起,应用于移动车辆无线定位的场景中,提高了更新短效星历的速度