
一种基于检测前估计的雷达目标检测方法.pdf

An****70


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于检测前估计的雷达目标检测方法.pdf
本发明提出了一种基于检测前估计的雷达目标检测方法,包括如下步骤:基于常规脉冲多普勒处理与预检测,获取感兴趣点迹先验信息;对点迹距离和速度参数进行估计,在检测前完成参数估计;基于感兴趣点迹参数,建立接收信号的降维观测模型;基于稀疏恢复算法重构降维观测模型中的目标向量;基于重构结果,设计广义似然比检测器,进行目标检测。本发明的方法能够显著降低雷达信号处理损失,且目标检测器具有恒虚警特性,可大幅提升微弱目标检测性能。
一种基于FFT的线性调频连续波雷达检测前参数估计方法.pdf
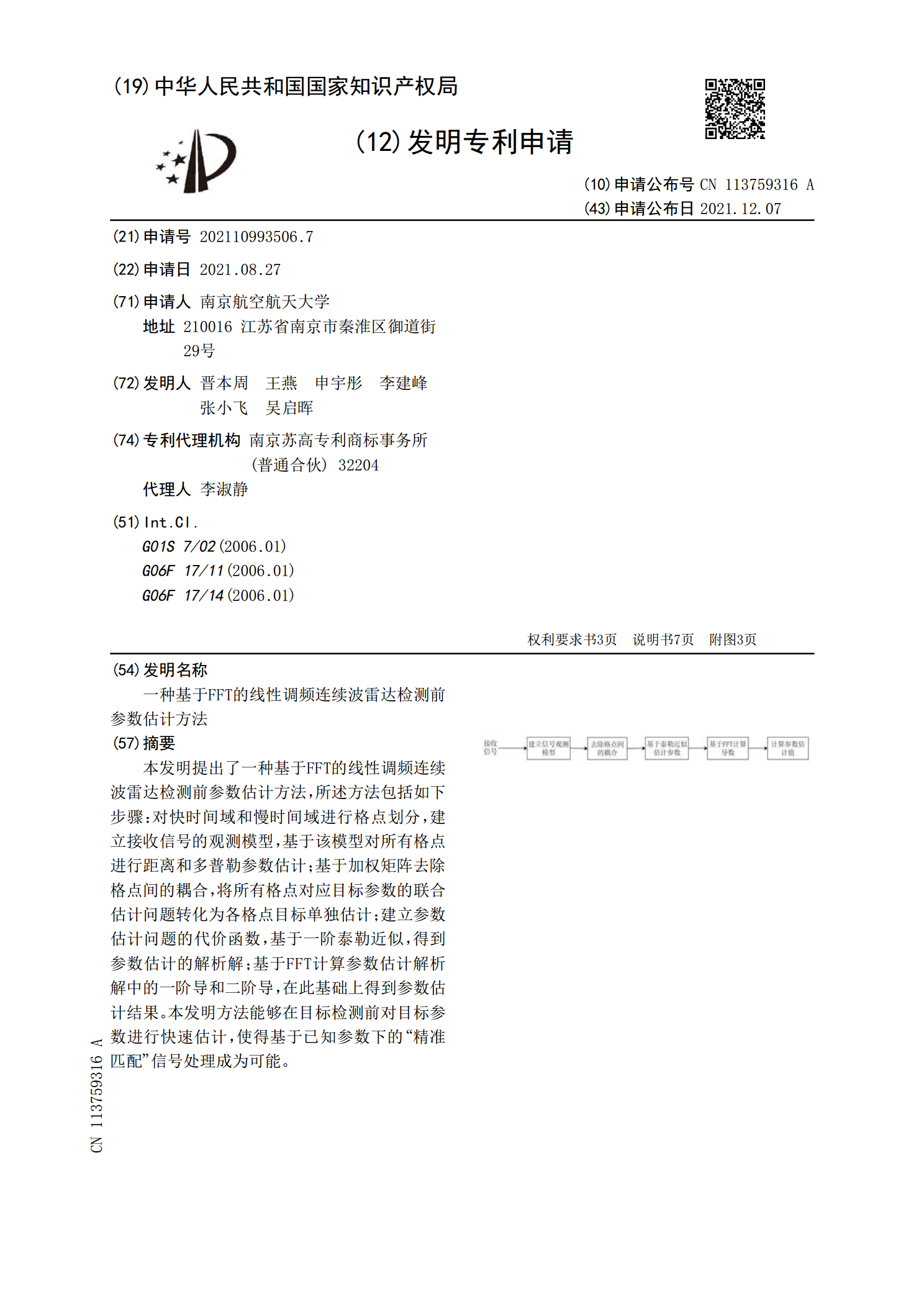
本发明提出了一种基于FFT的线性调频连续波雷达检测前参数估计方法,所述方法包括如下步骤:对快时间域和慢时间域进行格点划分,建立接收信号的观测模型,基于该模型对所有格点进行距离和多普勒参数估计;基于加权矩阵去除格点间的耦合,将所有格点对应目标参数的联合估计问题转化为各格点目标单独估计;建立参数估计问题的代价函数,基于一阶泰勒近似,得到参数估计的解析解;基于FFT计算参数估计解析解中的一阶导和二阶导,在此基础上得到参数估计结果。本发明方法能够在目标检测前对目标参数进行快速估计,使得基于已知参数下的“精准匹配”

一种基于多普勒雷达心跳检测的频谱估计方法.pdf
本发明提出了一种基于多普勒雷达的非接触式精确心跳检测方法。首先,采用连续波多普勒雷达体征检测的原理捕捉人体心脏跳动引起的微弱胸腔位移引起的频移,即雷达向受试者通过发射端发射T(t)。随后T(t)信号的相位被受试者胸壁运动x(t)所调制,反射信号被雷达接收端所捕获;其次,反射信号经过前端的低噪声放大器后,得到基带信号,采用正交混频器解调基带信号,再经过增益放大器后,由反正切解调和接卷绕计算可得到胸壁信号;最后,胸壁模拟信号经过模数转换器得到数字信号x(t),在数字信号处理后在PC端经过马勒特算法和匹配滤波算
一种基于雷达的目标检测方法、装置及雷达调度系统.pdf
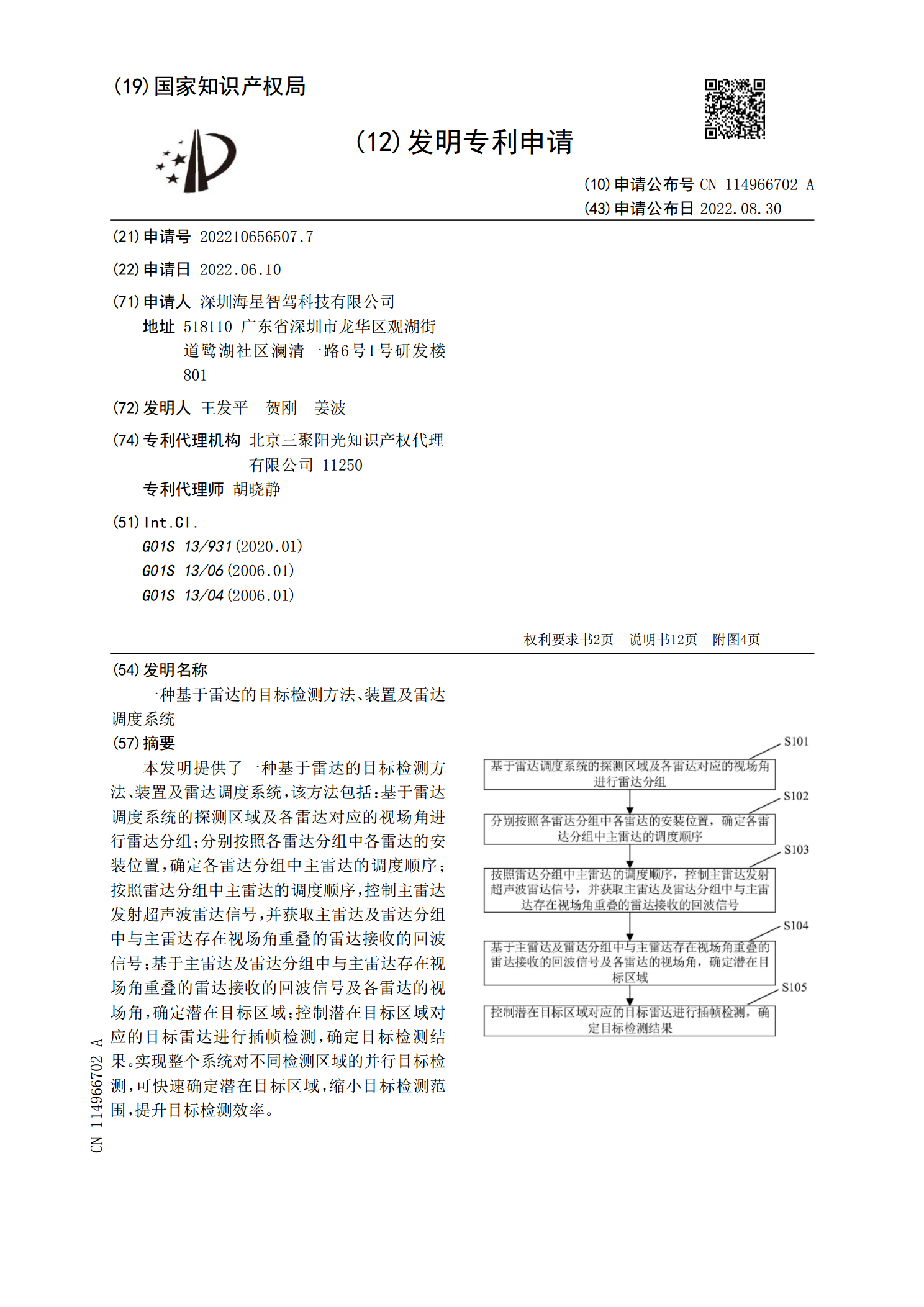
本发明提供了一种基于雷达的目标检测方法、装置及雷达调度系统,该方法包括:基于雷达调度系统的探测区域及各雷达对应的视场角进行雷达分组;分别按照各雷达分组中各雷达的安装位置,确定各雷达分组中主雷达的调度顺序;按照雷达分组中主雷达的调度顺序,控制主雷达发射超声波雷达信号,并获取主雷达及雷达分组中与主雷达存在视场角重叠的雷达接收的回波信号;基于主雷达及雷达分组中与主雷达存在视场角重叠的雷达接收的回波信号及各雷达的视场角,确定潜在目标区域;控制潜在目标区域对应的目标雷达进行插帧检测,确定目标检测结果。实现整个系统对
一种基于无线雷达的目标检测方法及装置.pdf
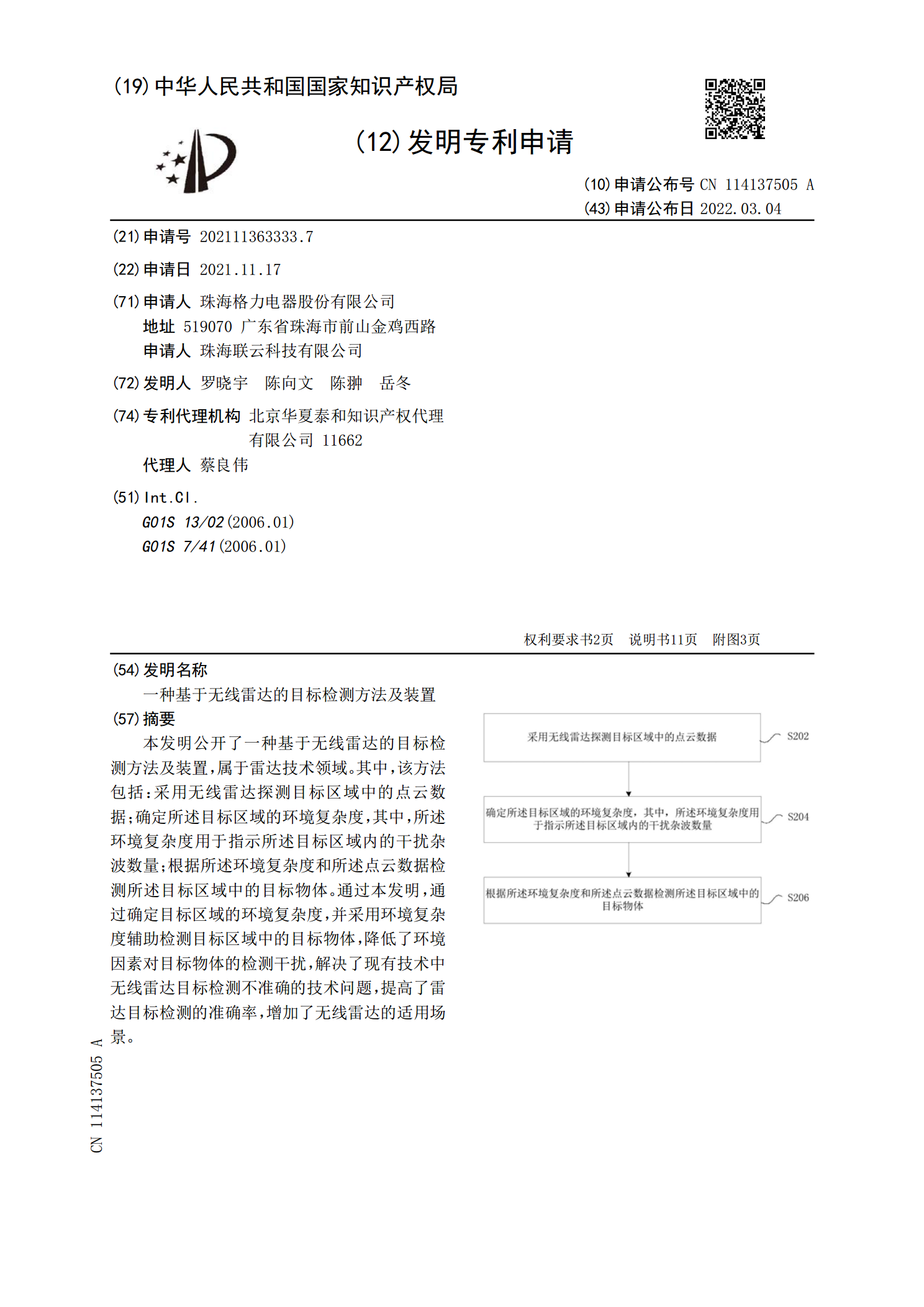
本发明公开了一种基于无线雷达的目标检测方法及装置,属于雷达技术领域。其中,该方法包括:采用无线雷达探测目标区域中的点云数据;确定所述目标区域的环境复杂度,其中,所述环境复杂度用于指示所述目标区域内的干扰杂波数量;根据所述环境复杂度和所述点云数据检测所述目标区域中的目标物体。通过本发明,通过确定目标区域的环境复杂度,并采用环境复杂度辅助检测目标区域中的目标物体,降低了环境因素对目标物体的检测干扰,解决了现有技术中无线雷达目标检测不准确的技术问题,提高了雷达目标检测的准确率,增加了无线雷达的适用场景。