
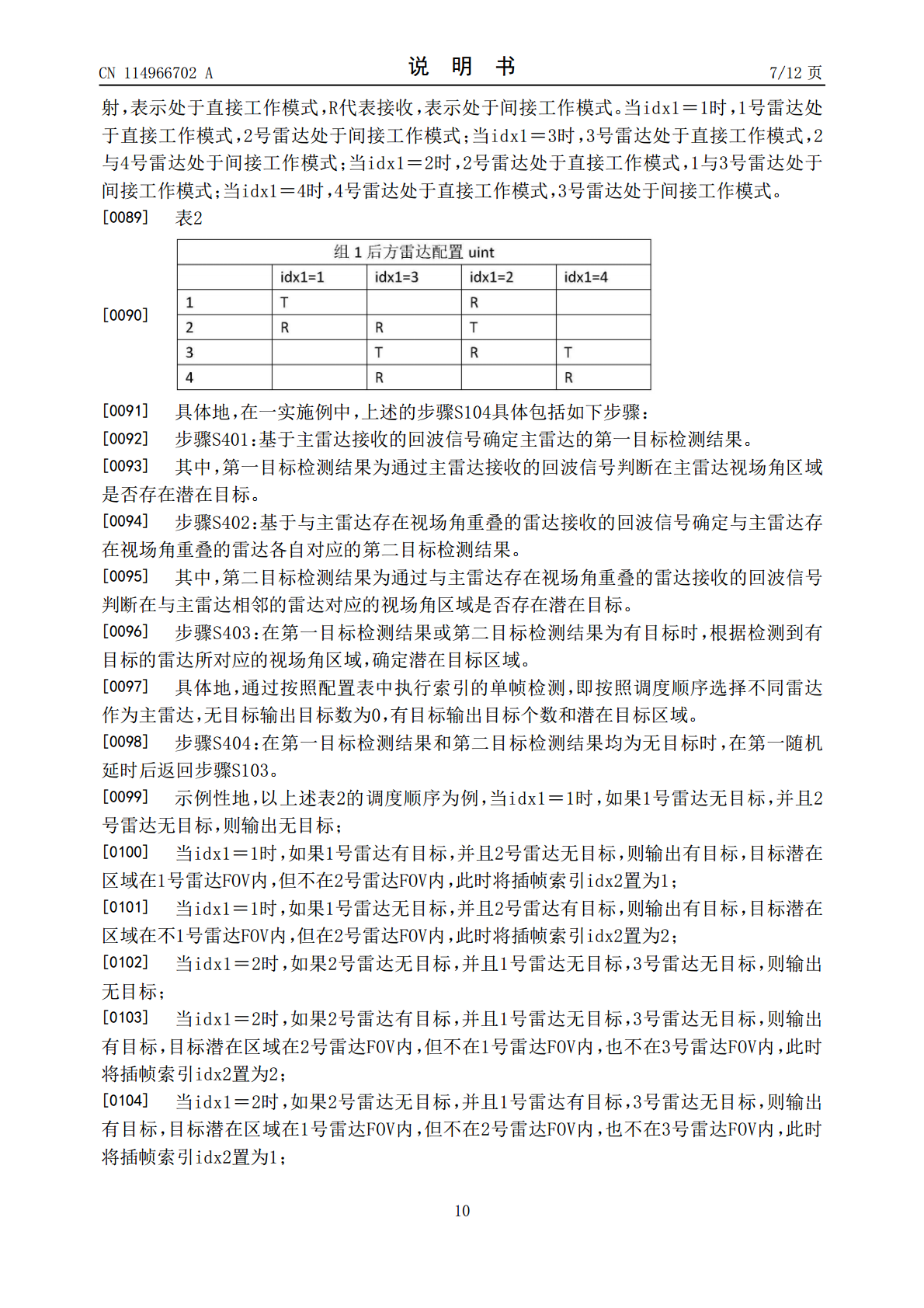
一种基于雷达的目标检测方法、装置及雷达调度系统.pdf

Ch****49

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于雷达的目标检测方法、装置及雷达调度系统.pdf
本发明提供了一种基于雷达的目标检测方法、装置及雷达调度系统,该方法包括:基于雷达调度系统的探测区域及各雷达对应的视场角进行雷达分组;分别按照各雷达分组中各雷达的安装位置,确定各雷达分组中主雷达的调度顺序;按照雷达分组中主雷达的调度顺序,控制主雷达发射超声波雷达信号,并获取主雷达及雷达分组中与主雷达存在视场角重叠的雷达接收的回波信号;基于主雷达及雷达分组中与主雷达存在视场角重叠的雷达接收的回波信号及各雷达的视场角,确定潜在目标区域;控制潜在目标区域对应的目标雷达进行插帧检测,确定目标检测结果。实现整个系统对
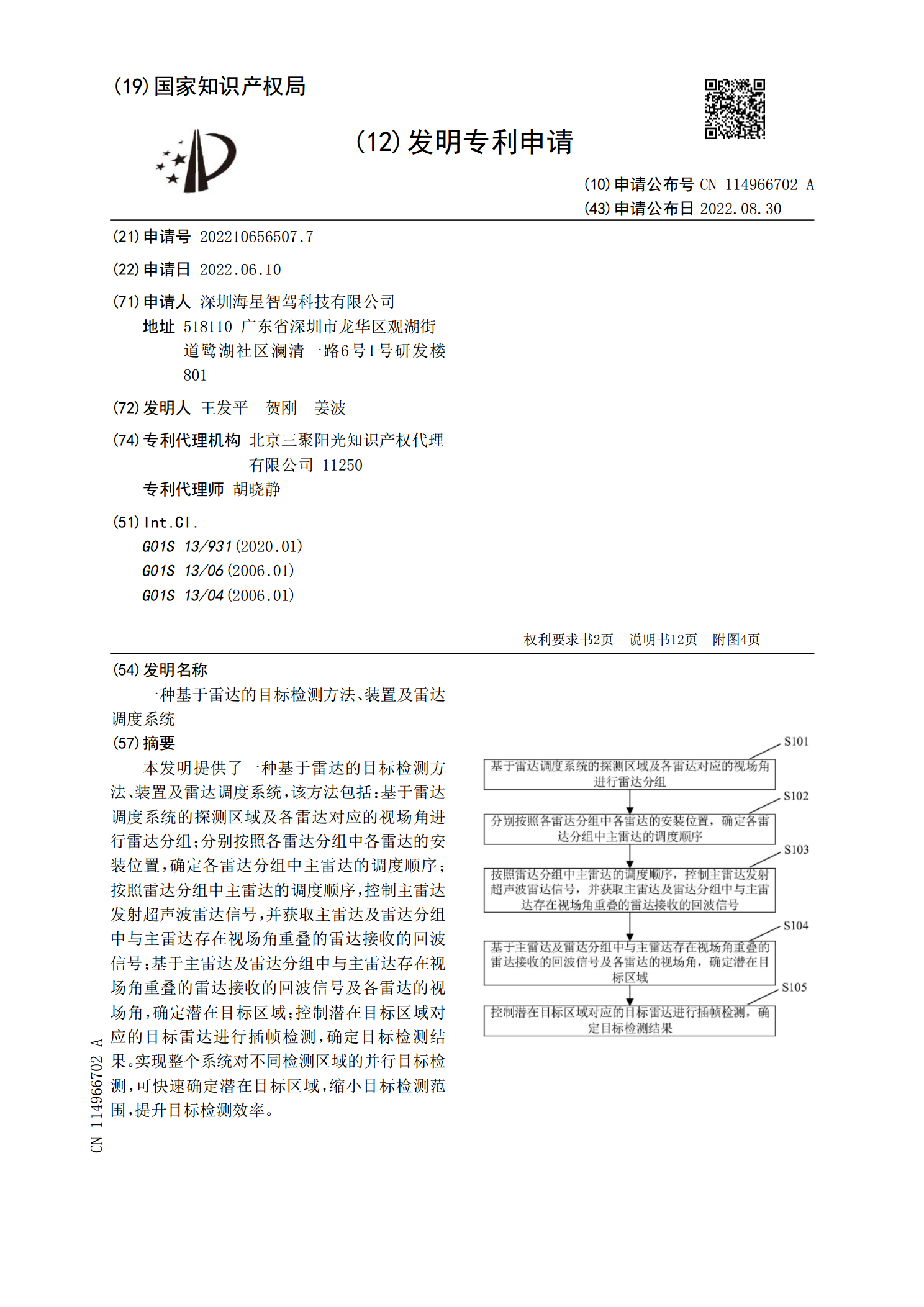
一种基于机器学习的雷达目标检测系统及方法.pdf
本发明公开了一种基于机器学习的雷达目标检测系统及方法,涉及雷达目标检测技术领域,包括侦察无人机探测模块、天线设计模块、检测目标分析模块和监控报警模块;侦察无人机探测模块用于通过侦察无人机上安装的雷达向外探测目标,并验证所探测目标的真实性;天线设计模块用于对天线方向图进行优化,得到天线模型;检测目标分析模块用于根据目标的状态和第二侦察无人机的飞行轨迹,分析第二侦察无人机与目标的距离结果;增强了天线向一个特定方向收发信号的能力,能够灵活的设计出符合特定要求的天线,提高了第一侦察无人机检测目标的能力;同时根据目
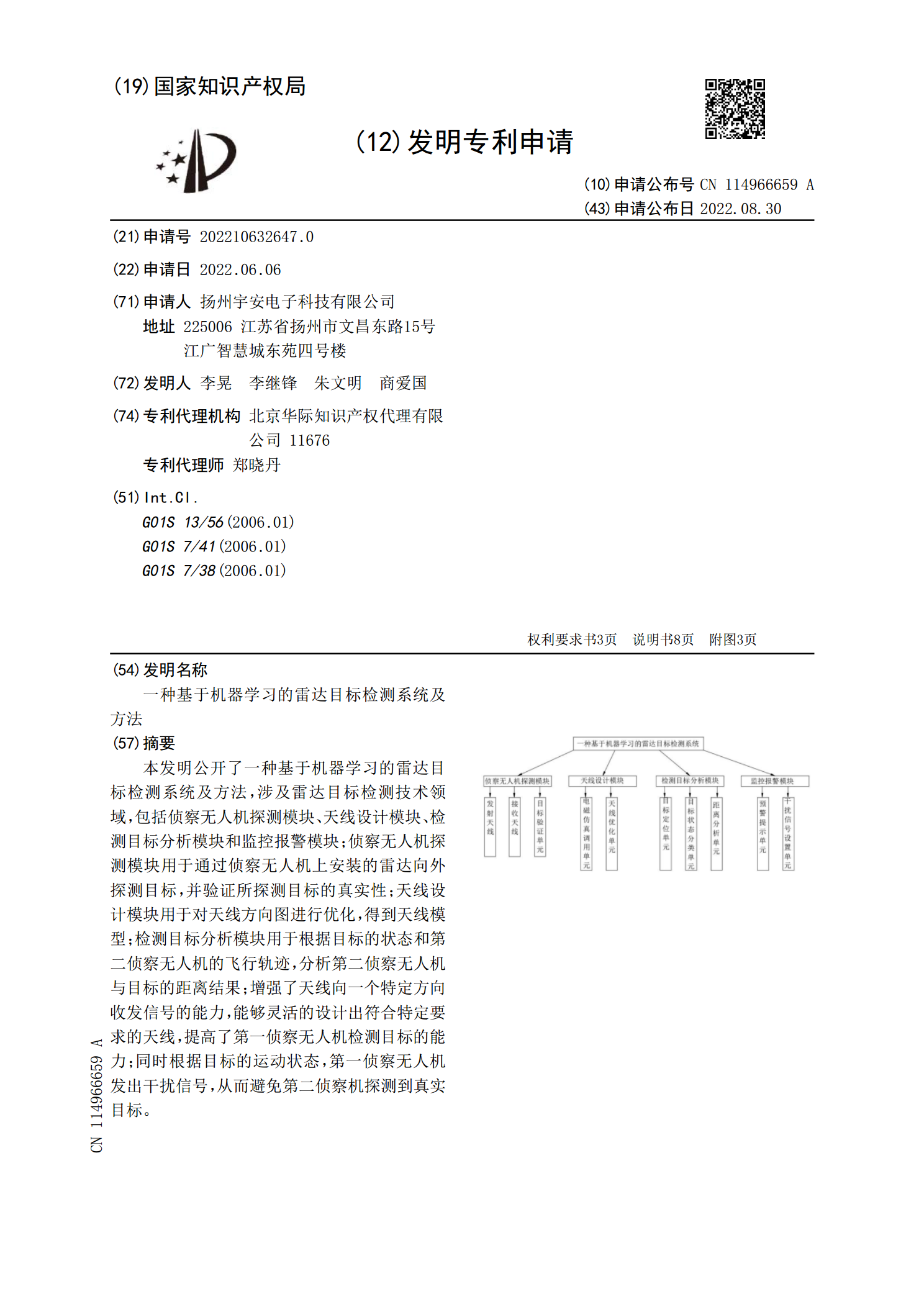
基于雷达图像的目标检测方法、装置、设备及介质.pdf
本发明实施例公开了基于雷达图像的目标检测方法、装置、设备及介质。其中,该方法包括:对待处理雷达图像进行滤波处理,获得预处理图像;对所述预处理图像进行边缘检测,获得边缘检测图像;对所述边缘检测图像进行二值化处理,获得二值化图像;对所述二值化图像执行设定边缘处理操作,获得目标检测图像。本技术方案,解决了在交通场景下机扫雷达检测图像中非必要信息的去除问题,能够有效将背景干扰因素与检测目标进行区分,从而进行有效检测的同时能够满足检测实时性的需求。
一种基于无线雷达的目标检测方法及装置.pdf
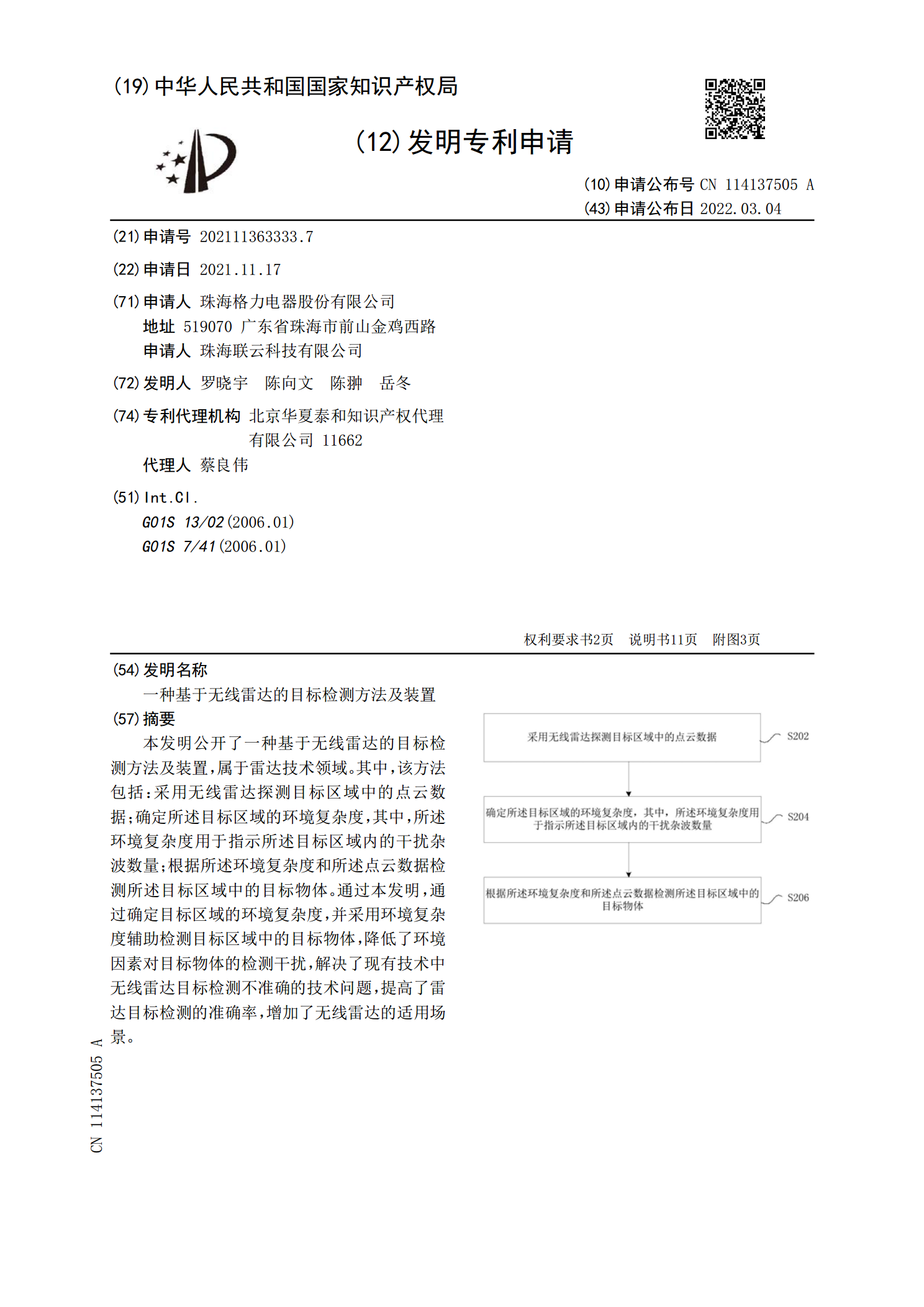
本发明公开了一种基于无线雷达的目标检测方法及装置,属于雷达技术领域。其中,该方法包括:采用无线雷达探测目标区域中的点云数据;确定所述目标区域的环境复杂度,其中,所述环境复杂度用于指示所述目标区域内的干扰杂波数量;根据所述环境复杂度和所述点云数据检测所述目标区域中的目标物体。通过本发明,通过确定目标区域的环境复杂度,并采用环境复杂度辅助检测目标区域中的目标物体,降低了环境因素对目标物体的检测干扰,解决了现有技术中无线雷达目标检测不准确的技术问题,提高了雷达目标检测的准确率,增加了无线雷达的适用场景。
一种基于多普勒雷达的目标检测方法、介质及装置.pdf
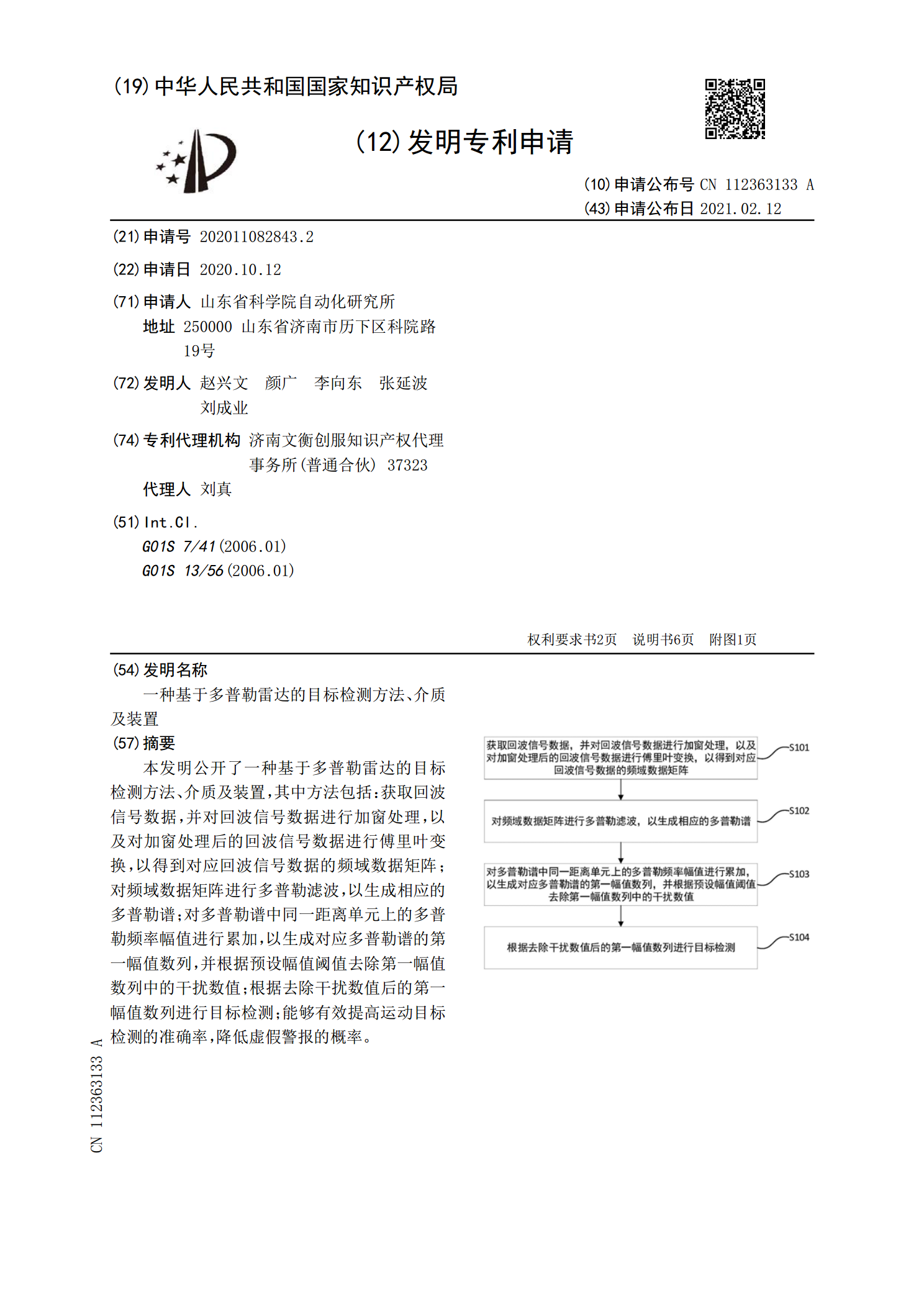
本发明公开了一种基于多普勒雷达的目标检测方法、介质及装置,其中方法包括:获取回波信号数据,并对回波信号数据进行加窗处理,以及对加窗处理后的回波信号数据进行傅里叶变换,以得到对应回波信号数据的频域数据矩阵;对频域数据矩阵进行多普勒滤波,以生成相应的多普勒谱;对多普勒谱中同一距离单元上的多普勒频率幅值进行累加,以生成对应多普勒谱的第一幅值数列,并根据预设幅值阈值去除第一幅值数列中的干扰数值;根据去除干扰数值后的第一幅值数列进行目标检测;能够有效提高运动目标检测的准确率,降低虚假警报的概率。