
一种基于涡旋光的非合作目标转速和位姿测量方法.pdf

努力****元恺


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于涡旋光的非合作目标转速和位姿测量方法.pdf
本发明涉及一种基于涡旋光的非合作目标转速和位姿测量方法,从旋转多普勒效应原理及散射点模型入手,先将目标上被光斑覆盖的散射点速度向椭圆切向投影,再向光束横截面投影,并将此投影速度除以光束的半径,这样便可求出涡旋光相位中的角向分量θ(t)对时间t的导数θ′(t),进而可求得基带回波信号的旋转多普勒频移;在此基础上,通过分析在偏心和倾斜同时存在情况下的旋转多普勒频移变化情况,得出了频移极值随相对空间位置参数的变化规律,进而可求得偏心和倾斜同时存在并且涡旋光光轴无偏转时的转速和偏心距。
一种空间非合作目标精确位姿测量方法.pdf
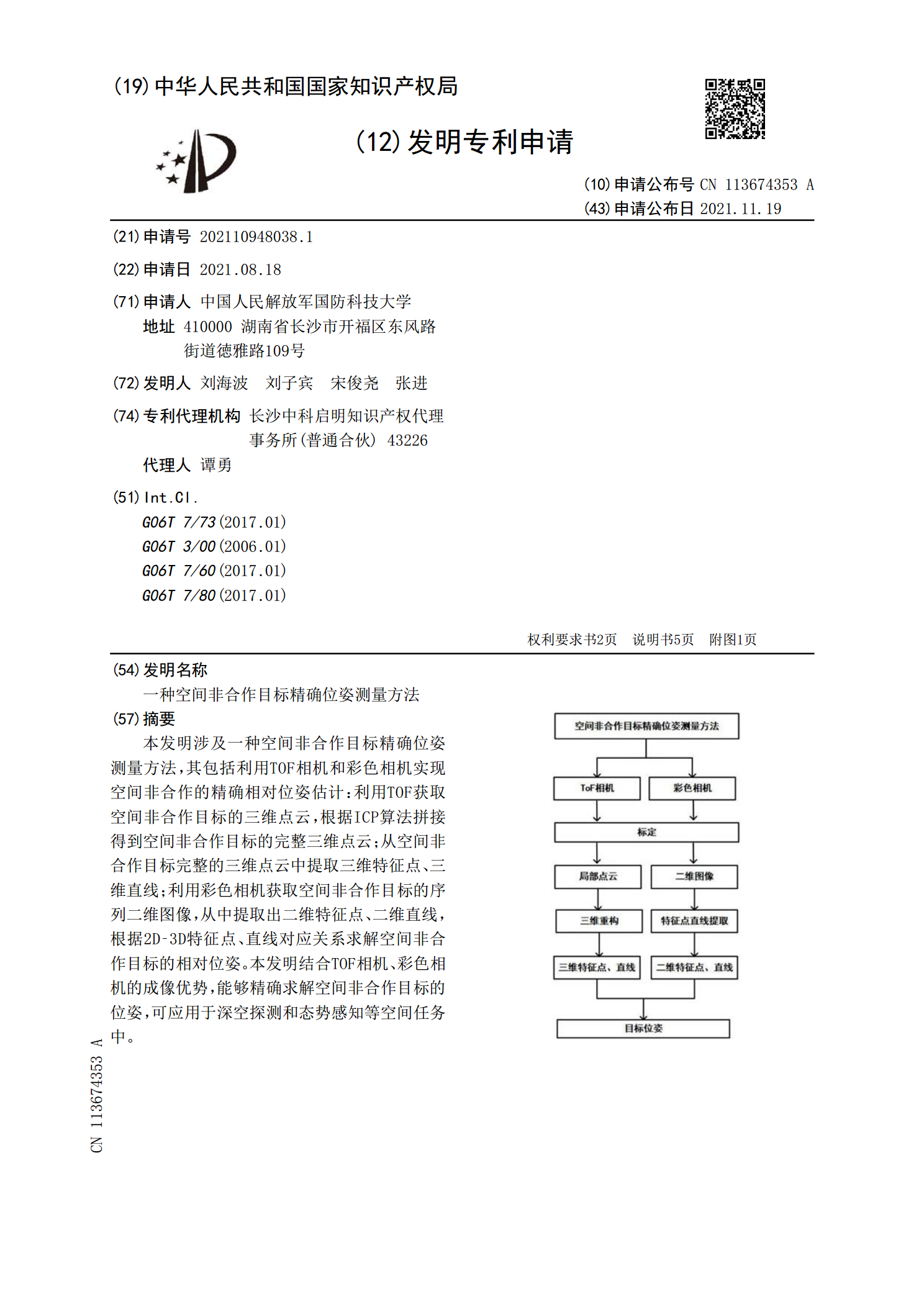
本发明涉及一种空间非合作目标精确位姿测量方法,其包括利用TOF相机和彩色相机实现空间非合作的精确相对位姿估计:利用TOF获取空间非合作目标的三维点云,根据ICP算法拼接得到空间非合作目标的完整三维点云;从空间非合作目标完整的三维点云中提取三维特征点、三维直线;利用彩色相机获取空间非合作目标的序列二维图像,从中提取出二维特征点、二维直线,根据2D‑3D特征点、直线对应关系求解空间非合作目标的相对位姿。本发明结合TOF相机、彩色相机的成像优势,能够精确求解空间非合作目标的位姿,可应用于深空探测和态势感知等空间

基于视觉的非合作目标位姿估计方法研究.docx
基于视觉的非合作目标位姿估计方法研究基于视觉的非合作目标位姿估计方法研究摘要:随着机器视觉和机器学习的迅猛发展,基于视觉的非合作目标位姿估计方法逐渐成为研究的热点。非合作目标位姿估计是指在没有预先标定或者训练的情况下,通过对目标的视觉信息进行分析和处理,推测目标的位姿信息,从而实现对目标的跟踪和控制。本文主要研究了基于视觉的非合作目标位姿估计方法,包括特征提取,特征匹配和姿态估计三个关键步骤,并通过实验验证了该方法的可行性和有效性。关键词:视觉;非合作;目标位姿估计;特征提取;特征匹配;姿态估计1.引言非

一种基于序列立体观测的非合作目标位姿监测方法.docx
一种基于序列立体观测的非合作目标位姿监测方法标题:一种基于序列立体观测的非合作目标位姿监测方法摘要:随着计算机视觉和机器人技术的不断发展,对于非合作目标位姿的实时监测成为了一个具有挑战性且重要的问题。本文提出了一种基于序列立体观测的新方法,该方法结合了立体相机和序列图像处理技术,能够实现对非合作目标的位姿监测。通过将目标的二维图像轨迹转化为三维空间中的轨迹,并使用某种跟踪算法对目标进行追踪,从而实现对目标的位姿监测。实验结果表明,该方法在准确性和实时性方面表现出了较好的效果。引言:位姿监测是计算机视觉和机

一种基于涡旋光的任意入射条件下物体转速测量方法.pdf
本发明涉及一种基于涡旋光的任意入射条件下物体转速测量方法。涡旋光是一种具有螺旋波阵面的特殊光场,旋转多普勒效应是旋转物体引起的光学频移。首先,使用空间光调制器制备叠加态涡旋光;其次,通过光束准直与滤波系统将叠加态涡旋光照射到旋转平板物体上的任意位置;最后,用光电探测器检测反射光的光强信息并输入到示波器进行频谱分析。根据示波器显示的频移信号,可得出平板物体的旋转速度。本方法光路简洁,灵活性强,具备较高的精度,可在任意入射条件下测量物体的旋转速度。