
基于结构光场的三维矢量速度测量系统及测量方法.pdf

灵波****ng

1/8

2/8

3/8

4/8

5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于结构光场的三维矢量速度测量系统及测量方法.pdf
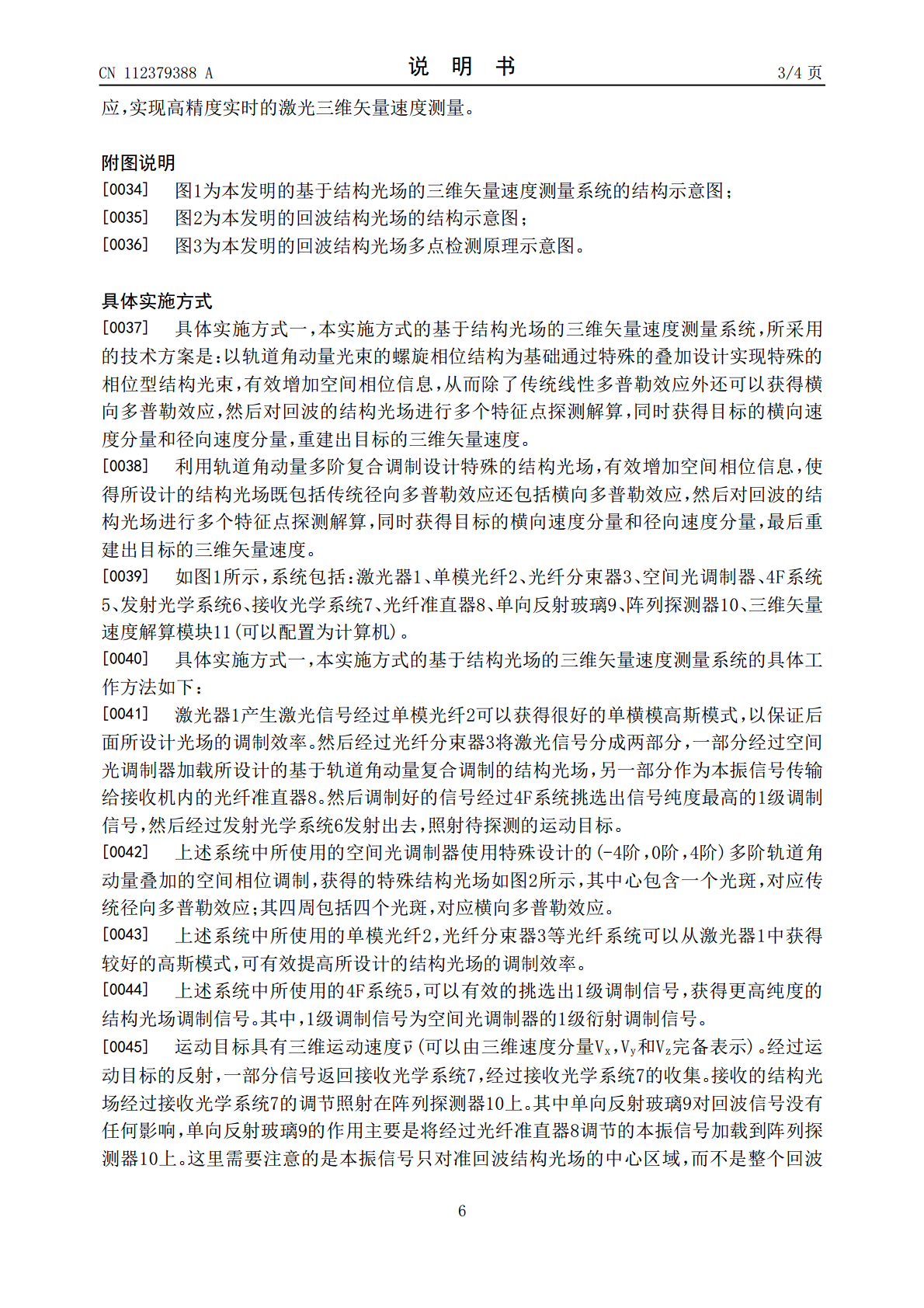
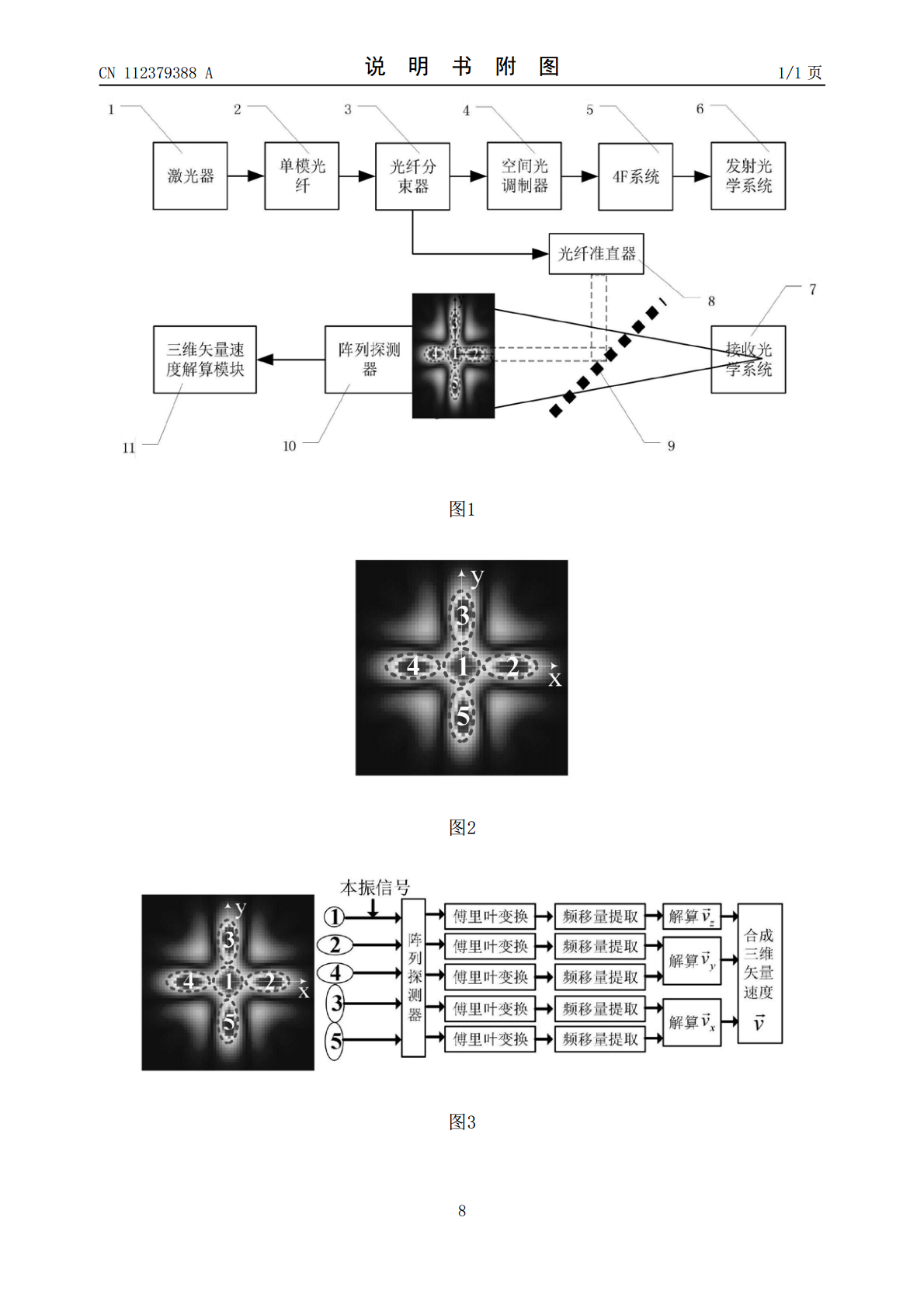
本发明的基于结构光场的三维矢量速度测量系统及测量方法涉及激光多维测速技术领域,目的是为了克服现有技术中对三维矢量速度的测量较为复杂且精度不高,以及实时性较差的问题,系统中的激光器发射出射激光通过空间光调制器进行多阶角动量复合调制生成调制信号,然后再照射待探测的运动目标生成回波信号;接收光学系统调节回波信号后使其穿过单向反射玻璃的背面加载至阵列探测器;且使得本振信号对准回波结构光场中心的径向多普勒效应光斑;阵列探测器探测四个横向多普勒效应光斑区域、以及径向多普勒效应光斑与本振信号的叠加区域,得到对应的每个时
一种基于结构光场成像的三维轮廓测量方法.pdf
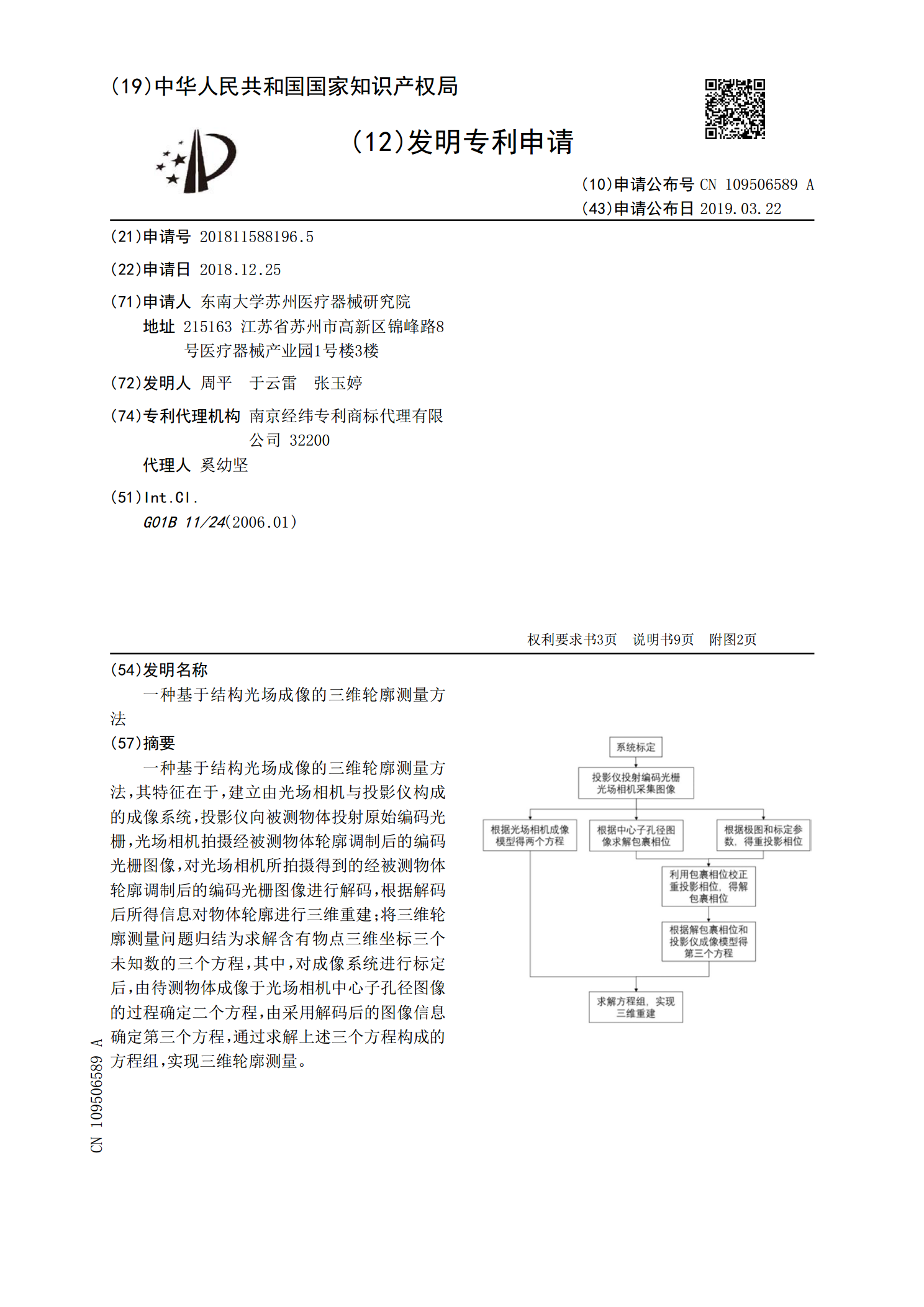
一种基于结构光场成像的三维轮廓测量方法,其特征在于,建立由光场相机与投影仪构成的成像系统,投影仪向被测物体投射原始编码光栅,光场相机拍摄经被测物体轮廓调制后的编码光栅图像,对光场相机所拍摄得到的经被测物体轮廓调制后的编码光栅图像进行解码,根据解码后所得信息对物体轮廓进行三维重建;将三维轮廓测量问题归结为求解含有物点三维坐标三个未知数的三个方程,其中,对成像系统进行标定后,由待测物体成像于光场相机中心子孔径图像的过程确定二个方程,由采用解码后的图像信息确定第三个方程,通过求解上述三个方程构成的方程组,实现三

基于线结构光的三维影像测量方法.pdf
本发明涉及一种,尤其是一种基于线结构光的三维影像测量方法。该方法不仅能利用线结构光的原理快速获取物体表面上的三维数据,同时还能获取空间物体的精确的边缘轮廓数据;同时,该方法步骤简单,在硬件上,只需在现有的三维影像测量仪上增加环形LED光源即可实现。

基于线性透镜阵列的面结构光三维测量方法.docx
基于线性透镜阵列的面结构光三维测量方法基于线性透镜阵列的面结构光三维测量方法摘要:面结构光是一种常用的三维测量技术,广泛应用于工业制造、医学影像和虚拟现实等领域。本文提出了一种基于线性透镜阵列的面结构光三维测量方法。该方法利用透镜阵列的特殊光学性质,通过变换入射光线的角度来实现对被测物体的三维形状的测量。实验证明,该方法具有高精度和高稳定性。本文详细介绍了该方法的原理、系统架构、实验及结果分析,并对未来可能的研究方向进行了展望。关键词:面结构光,线性透镜阵列,三维测量1.引言面结构光是一种常用的三维测量技

基于数字光栅投影的结构光三维测量方法研究.docx
基于数字光栅投影的结构光三维测量方法研究基于数字光栅投影的结构光三维测量方法研究摘要:随着三维测量技术的发展,结构光三维测量方法成为越来越重要的技术领域。本文针对该领域进行了综述,并对基于数字光栅投影的结构光三维测量方法进行了研究。通过分析数字光栅投影的原理和特点,探讨了数字光栅投影在三维测量中的应用。实验结果表明,基于数字光栅投影的结构光三维测量方法具有高精度、高效率、高稳定性等优点,适用于多种不同领域的应用。一、引言随着现代制造工业和科研水平的不断提高,对三维形状和表面特征的测量要求也越来越高。结构光