
一种改进调频连续波雷达目标检测的降噪方法.pdf

玉军****la

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种改进调频连续波雷达目标检测的降噪方法.pdf
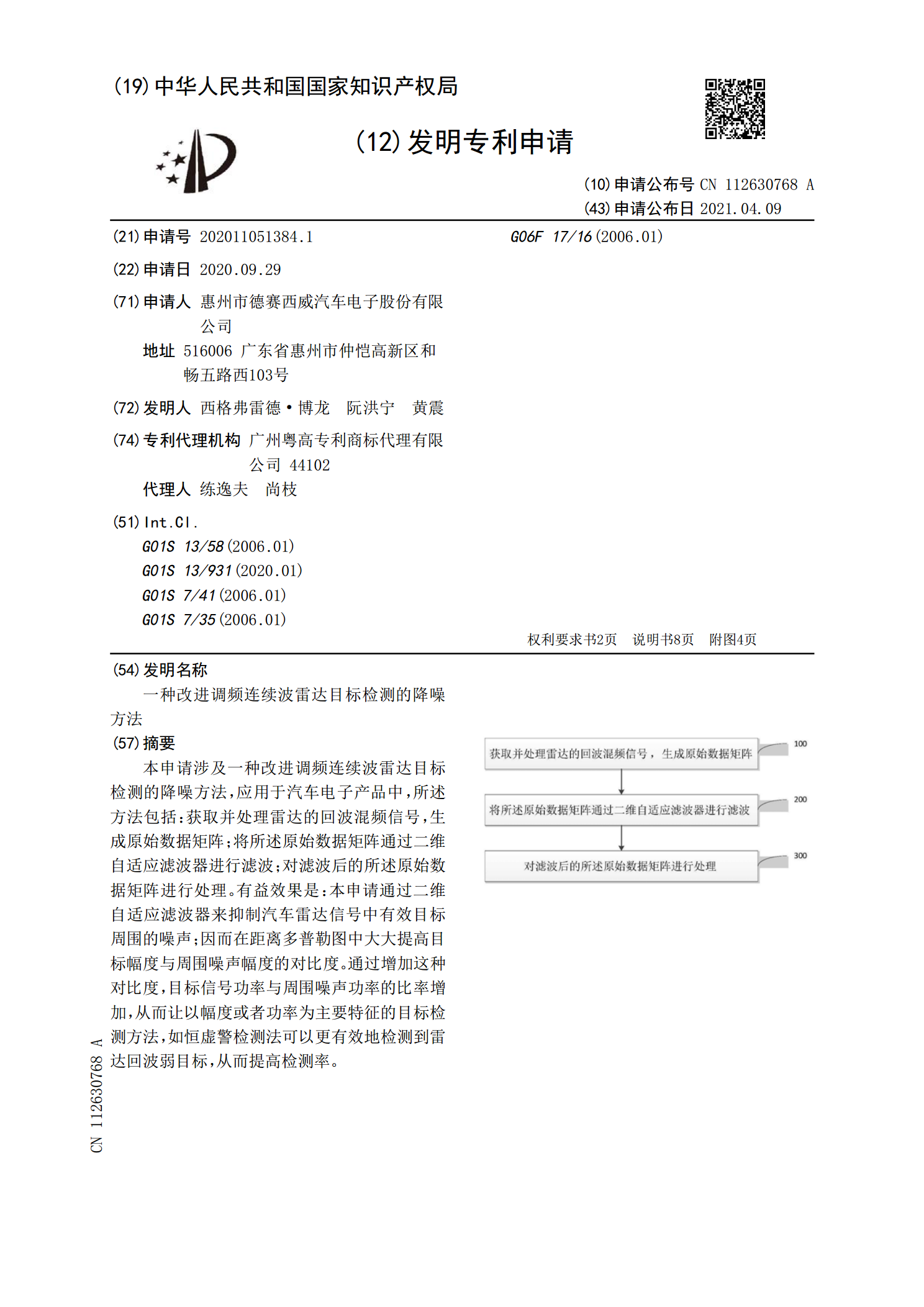
本申请涉及一种改进调频连续波雷达目标检测的降噪方法,应用于汽车电子产品中,所述方法包括:获取并处理雷达的回波混频信号,生成原始数据矩阵;将所述原始数据矩阵通过二维自适应滤波器进行滤波;对滤波后的所述原始数据矩阵进行处理。有益效果是:本申请通过二维自适应滤波器来抑制汽车雷达信号中有效目标周围的噪声;因而在距离多普勒图中大大提高目标幅度与周围噪声幅度的对比度。通过增加这种对比度,目标信号功率与周围噪声功率的比率增加,从而让以幅度或者功率为主要特征的目标检测方法,如恒虚警检测法可以更有效地检测到雷达回波弱目标,

一种基于调频连续波雷达的多目标检测方法.pdf
本发明公开了一种基于调频连续波雷达的多目标检测方法,包括:首先对恒频段做一维快速傅里叶变换,得到目标速度矩阵,然后对梯形波和三角波上下扫频频段做二维快速傅里叶变换,峰值点分别对应中心频率和模糊多普勒频率,然后先使用梯形波上下扫频段和恒频段对目标进行配对,得到目标初选信息,然后再将得到的信号与三角波中频信号进行配对,得到真实目标中频信号信息,进而的到目标的距离。本发明解决了现有技术中存在的多目标探测中存在虚假目标,以及配对速度慢的问题。

基于调频连续波雷达的慢速目标检测方法研究的开题报告.docx
基于调频连续波雷达的慢速目标检测方法研究的开题报告一、研究背景及意义在目标检测领域,慢速目标的检测一直是一个具有挑战性的问题。基于调频连续波雷达(FMCW)的雷达系统因其具有高精度、高分辨率等优势,在目标检测方面具有广泛的应用前景。相比于其他雷达系统,FMCW雷达系统信号处理复杂度较低,能够适应不同应用场景,因此受到越来越多研究者的关注。慢速目标在雷达信号处理中较难检测。例如静止或缓慢移动的目标通常与背景噪声的强度相似,往往难以区分。此外,目标有时会被遮挡或呈现出随机运动,增加了目标检测的难度,因此需要更

基于调频连续波雷达的慢速目标检测方法研究的任务书.docx
基于调频连续波雷达的慢速目标检测方法研究的任务书一、选题背景慢速目标是指在雷达回波信号中具有较低速度的目标,例如行人、自行车、缓慢移动的车辆等。在智能交通、安防监控、环境监测等领域中,检测慢速目标是非常重要的任务。而针对慢速目标检测的雷达系统,业界通常采用调频连续波雷达(FMCWRadar)。基于FMCW雷达的慢速目标检测技术是目前各大研究机构和企业研究的热点之一。该技术通过提取雷达回波信号的频率、时延等信息,对慢速目标进行有效的检测与跟踪。然而,在应用中还存在一些问题,例如高速目标污染、信噪比低、多目标
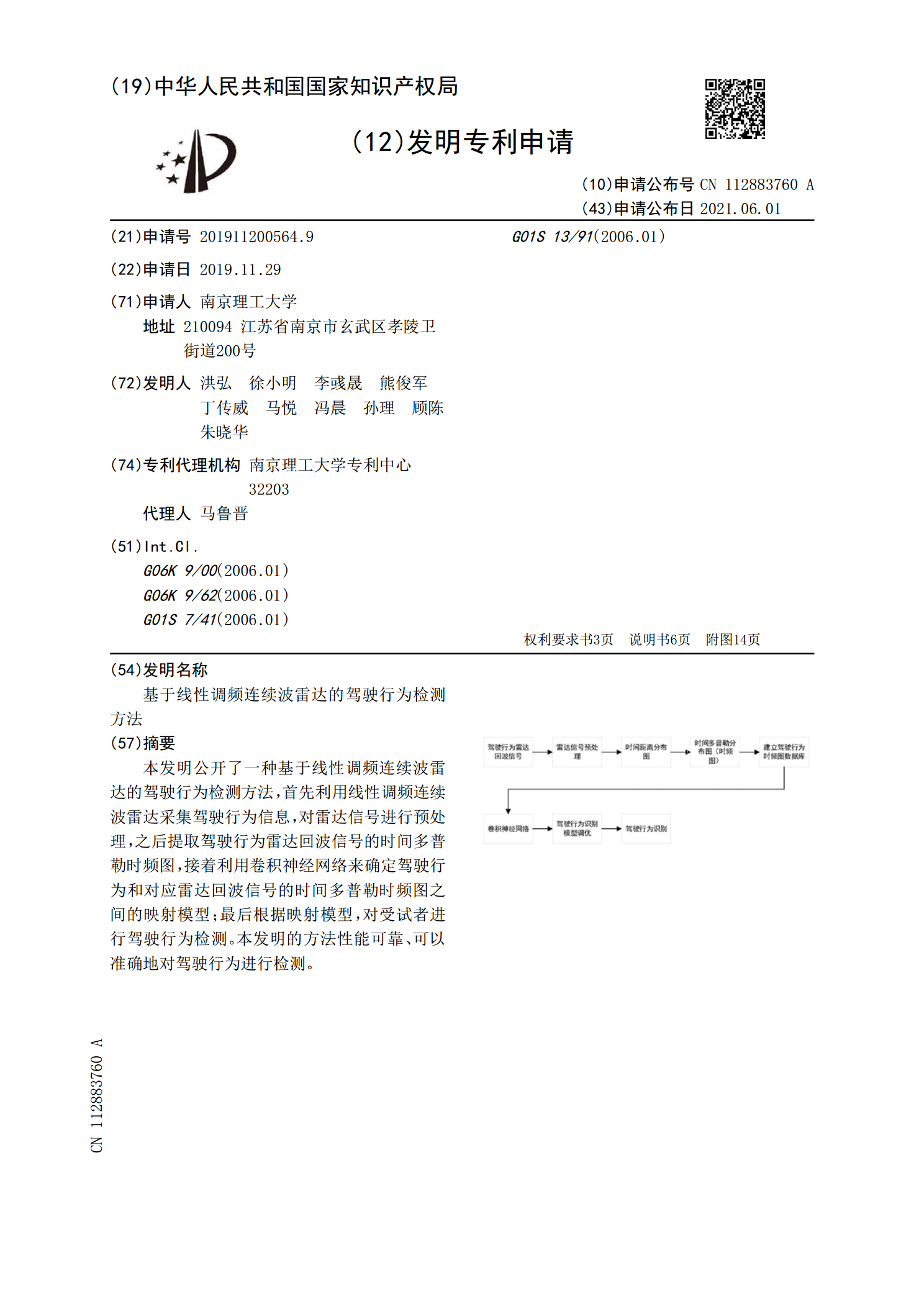
基于线性调频连续波雷达的驾驶行为检测方法.pdf
本发明公开了一种基于线性调频连续波雷达的驾驶行为检测方法,首先利用线性调频连续波雷达采集驾驶行为信息,对雷达信号进行预处理,之后提取驾驶行为雷达回波信号的时间多普勒时频图,接着利用卷积神经网络来确定驾驶行为和对应雷达回波信号的时间多普勒时频图之间的映射模型;最后根据映射模型,对受试者进行驾驶行为检测。本发明的方法性能可靠、可以准确地对驾驶行为进行检测。