
基于线性调频连续波雷达的驾驶行为检测方法.pdf

康佳****文库


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于线性调频连续波雷达的驾驶行为检测方法.pdf
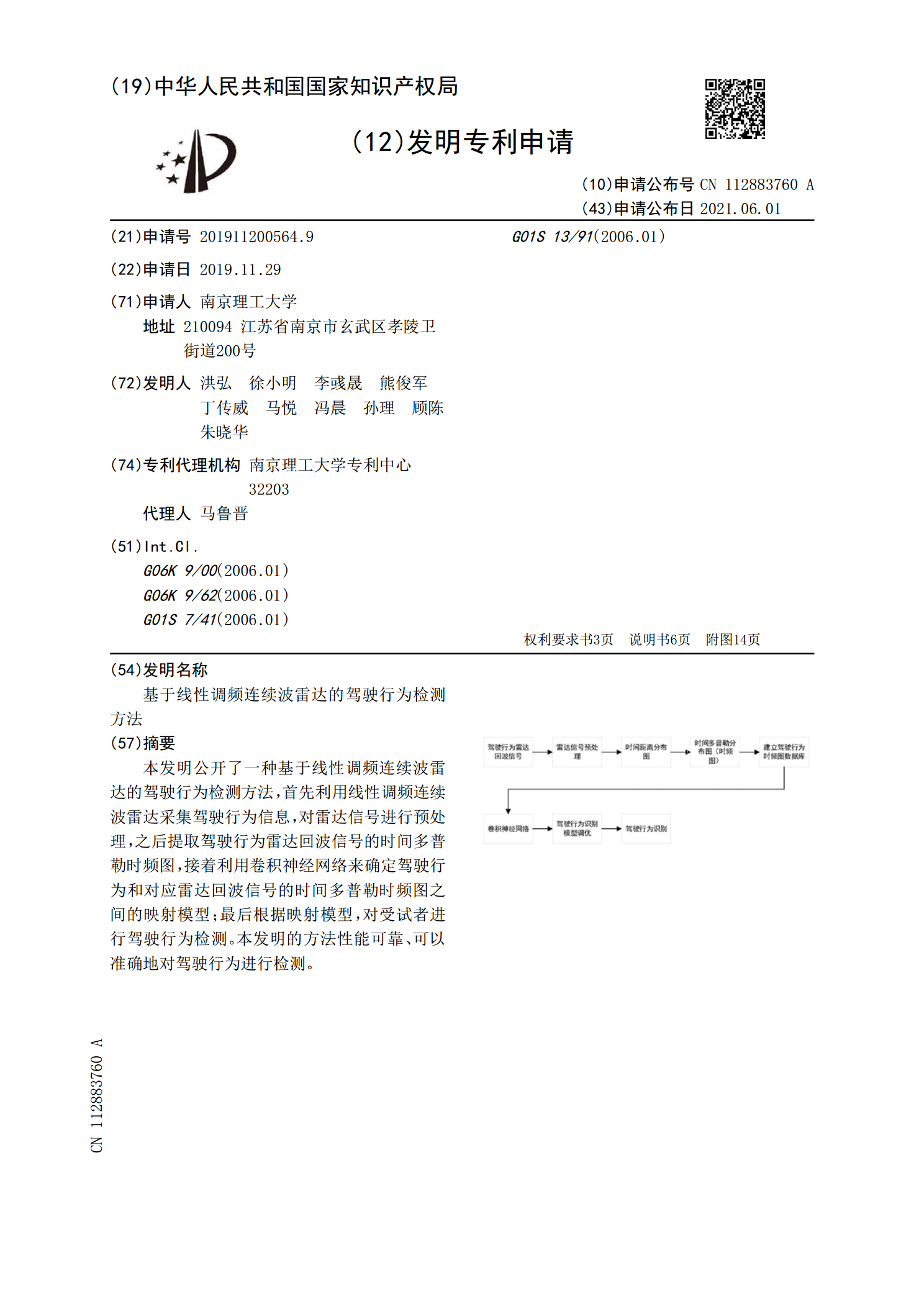
本发明公开了一种基于线性调频连续波雷达的驾驶行为检测方法,首先利用线性调频连续波雷达采集驾驶行为信息,对雷达信号进行预处理,之后提取驾驶行为雷达回波信号的时间多普勒时频图,接着利用卷积神经网络来确定驾驶行为和对应雷达回波信号的时间多普勒时频图之间的映射模型;最后根据映射模型,对受试者进行驾驶行为检测。本发明的方法性能可靠、可以准确地对驾驶行为进行检测。

基于线性调频连续波雷达的呼吸信号检测技术研究.docx
基于线性调频连续波雷达的呼吸信号检测技术研究随着科技和医学的进步,呼吸检测技术也在不断的发展。其中基于线性调频连续波雷达技术的呼吸信号检测技术具有独特优势,被广泛应用于无创呼吸监测、医疗诊断、生物测量等领域。本文将探讨基于线性调频连续波雷达的呼吸信号检测技术研究。一、线性调频连续波雷达技术简介线性调频连续波雷达是一种无源测距与目标参数提取技术,它将一个固定的频率载波向目标连续发送,同时频率在一定的范围内线性变化,并接收目标回波信号进行信号处理。该技术通过测量回波的时间延迟和频移,可以提取目标的距离、速度、
一种基于FFT的线性调频连续波雷达检测前参数估计方法.pdf
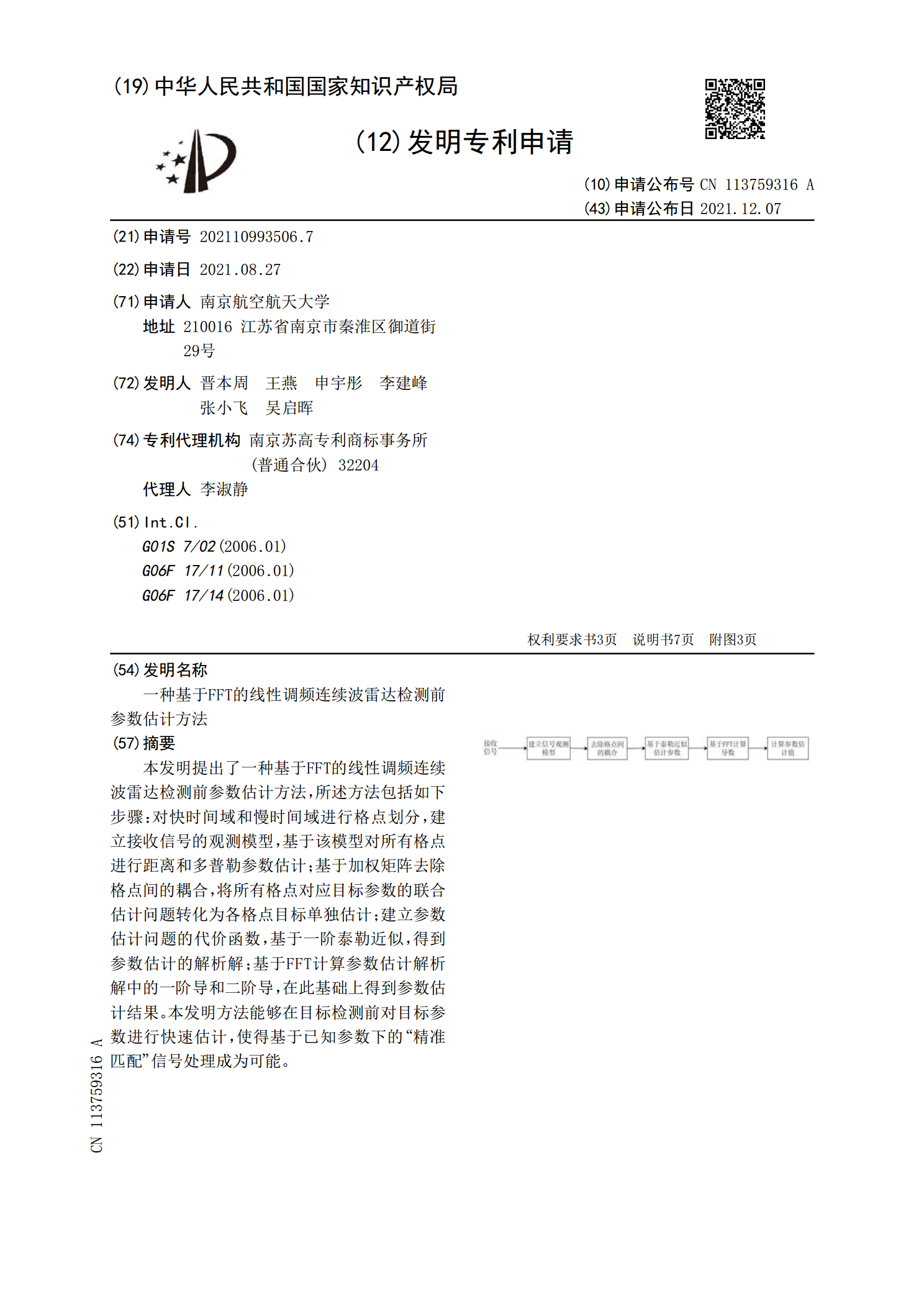
本发明提出了一种基于FFT的线性调频连续波雷达检测前参数估计方法,所述方法包括如下步骤:对快时间域和慢时间域进行格点划分,建立接收信号的观测模型,基于该模型对所有格点进行距离和多普勒参数估计;基于加权矩阵去除格点间的耦合,将所有格点对应目标参数的联合估计问题转化为各格点目标单独估计;建立参数估计问题的代价函数,基于一阶泰勒近似,得到参数估计的解析解;基于FFT计算参数估计解析解中的一阶导和二阶导,在此基础上得到参数估计结果。本发明方法能够在目标检测前对目标参数进行快速估计,使得基于已知参数下的“精准匹配”

基于FPGA的线性调频连续波雷达信号处理设计与实现.docx
基于FPGA的线性调频连续波雷达信号处理设计与实现基于FPGA的线性调频连续波雷达信号处理设计与实现摘要:随着雷达技术的不断发展,线性调频连续波雷达(LinearFrequencyModulatedContinuousWaveRadar,LFMCWRadar)因其具有高分辨率、低功耗等优点而被广泛应用于目标检测与跟踪领域。本文主要介绍了基于FPGA的LFMCW雷达信号处理设计与实现。通过对LFMCW雷达的原理和信号处理算法进行分析,结合FPGA的并行计算能力,提出了一种基于FPGA的LFMCW雷达信号处理

线性调频连续波雷达信号处理研究.docx
线性调频连续波雷达信号处理研究线性调频(LinearFrequencyModulation,LFM)连续波雷达信号处理研究摘要:线性调频(LFM)连续波雷达信号处理是雷达技术中的重要研究领域之一。本论文将对LFM连续波雷达信号的生成、传播和处理过程进行综述,并重点探讨LFM雷达信号在目标检测、距离测量和速度估计等方面的应用。最后,我们将介绍当前研究中存在的挑战和未来的发展方向。1.引言线性调频连续波雷达是一种在距离、速度和角度等方面具有广泛应用的雷达系统。它通过对发射信号施加线性调频扫频,利用回波信号的频