
一种基于微多普勒特征的手势识别方法及系统.pdf

雨巷****珺琦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于微多普勒特征的手势识别方法及系统.pdf
本发明涉及一种基于微多普勒特征的手势识别方法及系统,方法包括:采用穿墙雷达观测被障碍物遮挡的指挥手势,得到雷达回波信号;所述障碍物包括墙体;对雷达回波信号进行多普勒谱与短时傅里叶变换时频谱分析,提取由障碍物遮挡指挥手势所引起的多维微多普勒特征;建立由历史观测雷达回波信号中提取的多维微多普勒特征和对应的指挥手势组成的训练集,对分类器进行训练;将实时提取的障碍物遮挡的指挥手势引起的多维微多普勒特征输入训练好的分类器进行识别,确定被遮挡的指挥手势。本发明可准确识别障碍物后的单兵指挥手势,有效为行动决策提供必要信

一种基于微多普勒特征的动态连续/非连续手势识别方法.pdf
本发明提出的一种基于微多普勒特征的动态连续/非连续手势识别方法,属于雷达技术领域和人机交互领域。该方法首先通过雷达采集动态连续/非连续手势数据,即时域雷达信号;随后对时域雷达信号进行时频分析得到回波信号的多普勒频率随时间变化图像,即每组数据的时频图;通过对每组数据的时频分析结果进行噪声滤除和特征提取,得到手势动作的相关特征;最后由支持向量机实现对手势动作的识别分类。本发明通过引入雷达多普勒效应,降低了环境、光照等因素对手势识别的影响,提高了动态手势的识别能力。
一种基于CW体制多普勒雷达的手势识别方法.pdf
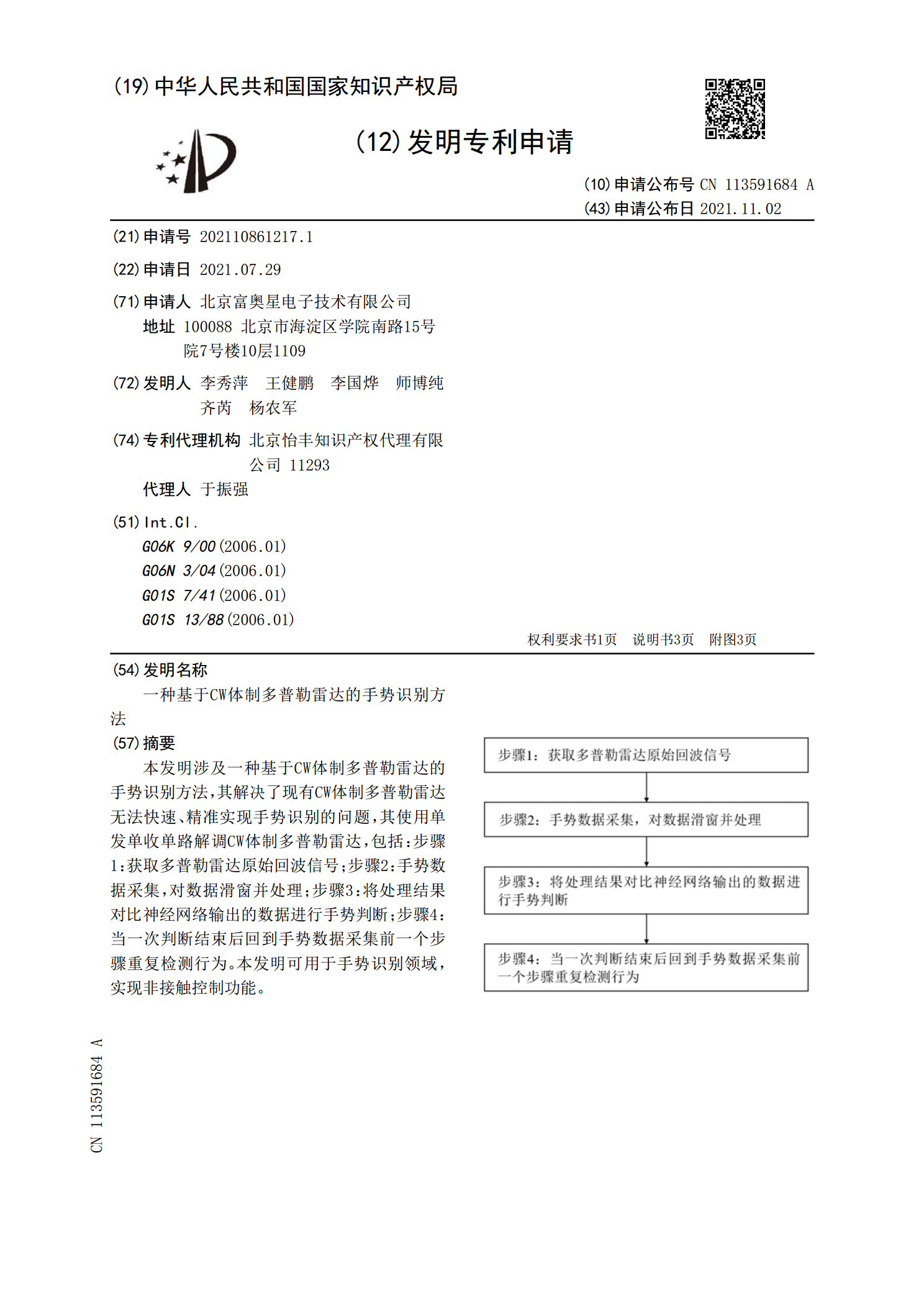
本发明涉及一种基于CW体制多普勒雷达的手势识别方法,其解决了现有CW体制多普勒雷达无法快速、精准实现手势识别的问题,其使用单发单收单路解调CW体制多普勒雷达,包括:步骤1:获取多普勒雷达原始回波信号;步骤2:手势数据采集,对数据滑窗并处理;步骤3:将处理结果对比神经网络输出的数据进行手势判断;步骤4:当一次判断结束后回到手势数据采集前一个步骤重复检测行为。本发明可用于手势识别领域,实现非接触控制功能。

基于微多普勒特征的水下目标识别方法.pdf
本发明提出一种基于微多普勒特征的水下目标识别方法,主要包括水下目标回波高分辨率微多普勒时频图的获取、采用深度卷积生成对抗网络对时频图样本进行数据增强、选择深度神经网络对样本数据集进行学习、通过计算机仿真生成水下目标的声纳回波信号对所提出的方法进行评估,验证其在水下目标识别中的有效性。本发明通过基于压缩感知的高分辨率时频分析,提高时频图的分辨率,能够更有效地提取出水下目标的微多普勒特征,并对时频图样本进行数据增强后用于神经网络的训练,实现对水下目标识别的目的。

一种基于卷积神经网络的三维微多普勒手势识别方法.pdf
本发明公开了一种基于卷积神经网络的三维微多普勒手势识别方法,涉及人机交互、无线感知和图像处理领域,具体涉及到使用卷积神经网络对三通道雷达架构探测到的三维微多普勒手势时频图识别方法。该方法首先提出能充分采集手势速度信息的三通道摆放系统架构;使用能量窗统计技术能连续提取有效的手势时域信号;使用时频图合成方式,使得三通道时频图信息可以同时融合处理;设计出经过裁剪并加入SVM层的卷积神经网络,能充分提取图像信息,识别准确率高。