
一种MIMO雷达多通道分离方法.pdf

一吃****新冬


1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种MIMO雷达多通道分离方法.pdf
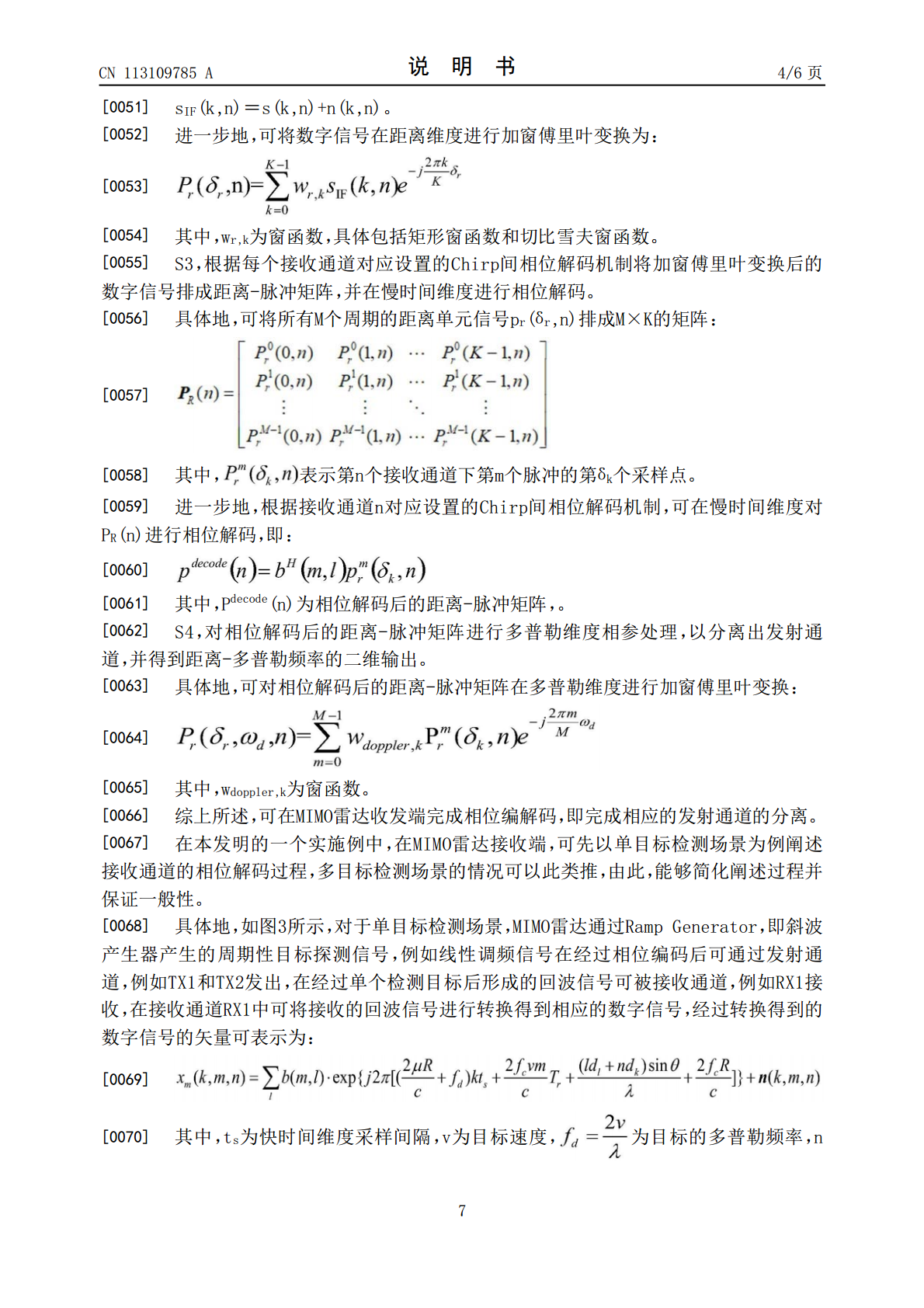
本发明提供了一种MIMO雷达多通道分离方法,包括:根据每个发射通道对应设置的Chirp间相位编码机制对需要发射的周期性目标探测信号在慢时间维度进行相应的相位编码;将每个接收通道接收到的回波信号转换为数字信号并在距离维度进行加窗傅里叶变换;根据每个接收通道对应设置的Chirp间相位解码机制将变换后的数字信号排成距离‑脉冲矩阵,并在慢时间维度进行相位解码;对相位解码后的距离‑脉冲矩阵进行多普勒维度相参处理,以分离出发射通道,并得到距离‑多普勒频率的二维输出。本发明能够实现各发射通道的信号同发,从而能够提高MI
一种MIMO人体雷达信号通道选择方法.pdf
本发明公开了一种MIMO人体雷达信号通道选择方法,用于根据MIMO人体雷达每个信号通道接收到的人体反射后的雷达信号数据,对每个信号通道的时频域信噪比进行计算,根据每个信号通道的时频域信噪比选择MIMO人体雷达有效信号通道;本发明提供的MIMO人体雷达信号通道选择方法首次将时频域微多普勒特性引入MIMO生物雷达人体运动信号通道评价与分选中,可靠性更强,优劣区分度更高。
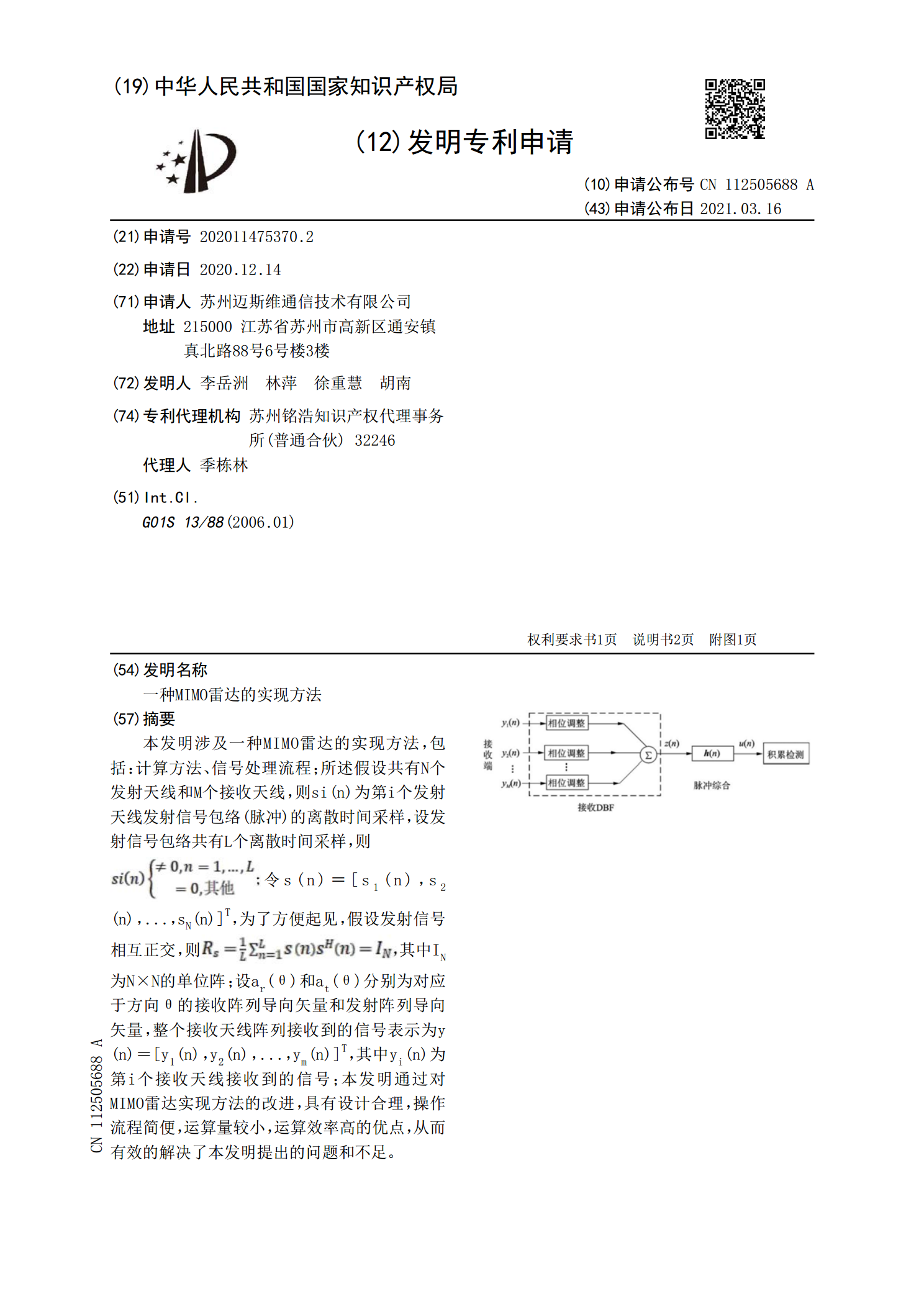
一种MIMO雷达的实现方法.pdf
本发明涉及一种MIMO雷达的实现方法,包括:计算方法、信号处理流程;所述假设共有N个发射天线和M个接收天线,则si(n)为第i个发射天线发射信号包络(脉冲)的离散时间采样,设发射信号包络共有L个离散时间采样,则

一种多通道雷达前视超分辨成像方法.pdf
本发明公开了一种多通道雷达前视超分辨成像方法,首先获取待成像区域的回波数据,通过对获取的数据进行距离向脉冲压缩,进行异常通道检测,得到异常通道位置,然后考虑异常通道和平台运动误差的影响,由惯性导航设备获取平台偏航和横滚,重构导向矩阵,进行超分辨处理,重构目标散射系数实现超分辨成像,得到超分辨成像结果。本发明的方法克服了单基雷达前视成像模糊和成像分辨率低的问题,有助于实现多通道雷达在考虑运动误差和通道缺失情况下的超分辨成像,利用不同通道的脉冲压缩数据的相关性,可以快速检测故障通道并克服其对超分辨率性能的影响
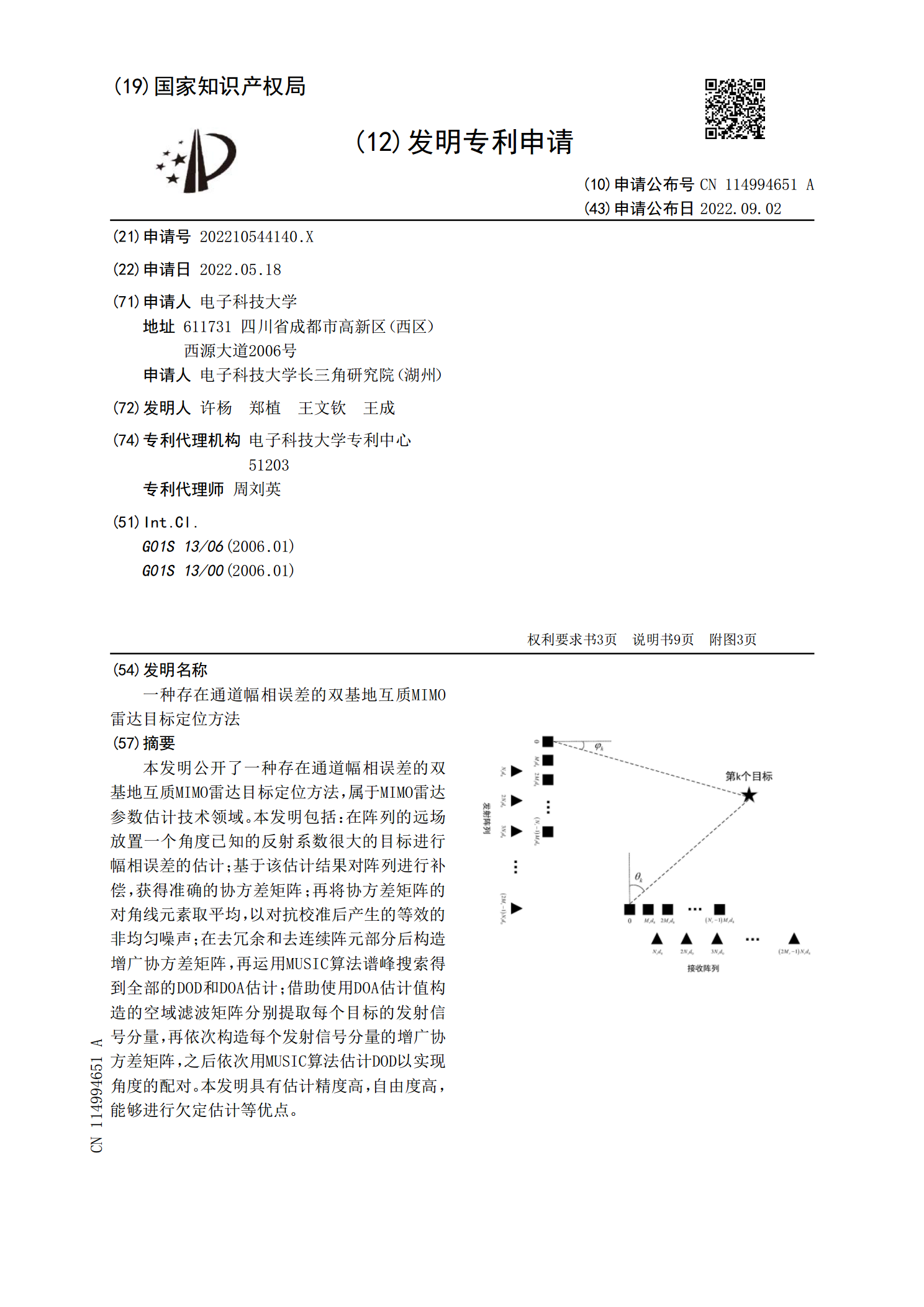
一种存在通道幅相误差的双基地互质MIMO雷达目标定位方法.pdf
本发明公开了一种存在通道幅相误差的双基地互质MIMO雷达目标定位方法,属于MIMO雷达参数估计技术领域。本发明包括:在阵列的远场放置一个角度已知的反射系数很大的目标进行幅相误差的估计;基于该估计结果对阵列进行补偿,获得准确的协方差矩阵;再将协方差矩阵的对角线元素取平均,以对抗校准后产生的等效的非均匀噪声;在去冗余和去连续阵元部分后构造增广协方差矩阵,再运用MUSIC算法谱峰搜索得到全部的DOD和DOA估计;借助使用DOA估计值构造的空域滤波矩阵分别提取每个目标的发射信号分量,再依次构造每个发射信号分量的增