
一种车载毫米波雷达抗干扰的方法.pdf

宜欣****外呢


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种车载毫米波雷达抗干扰的方法.pdf
本发明涉及一种车载毫米波雷达抗干扰的方法,包括在发射信号时,对每个发射chirp进行整体编码,不同的chirp的初相位为0或π。接收时按照与发射相反的规律对每个chirp接收的信号整体移相0或π,进行解调,解调后再做后续处理,本发明干扰信号多普勒谱峰值功率明显降低,当干扰信号功率不是很大时,直接降低到噪声门限下,不会被检测到;当干扰信号功率很大时,虽然超过了噪声基底,但是没有明显的尖峰,使用CFAR检测时,不会过CFAR门限而被判断为虚假目标。
一种车载毫米波雷达抗干扰方法及系统.pdf
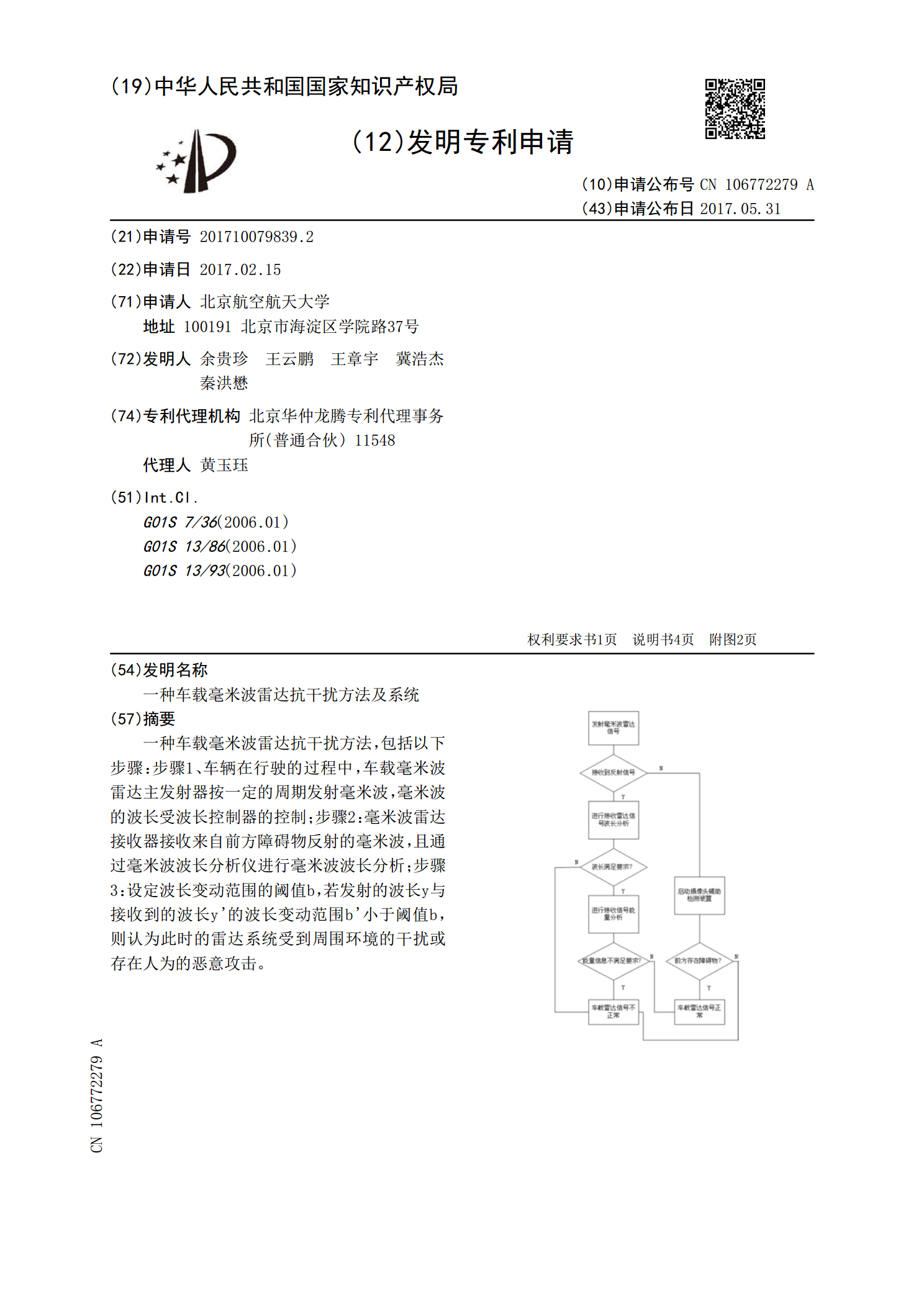
一种车载毫米波雷达抗干扰方法,包括以下步骤:步骤1、车辆在行驶的过程中,车载毫米波雷达主发射器按一定的周期发射毫米波,毫米波的波长受波长控制器的控制;步骤2:毫米波雷达接收器接收来自前方障碍物反射的毫米波,且通过毫米波波长分析仪进行毫米波波长分析;步骤3:设定波长变动范围的阈值b,若发射的波长y与接收到的波长y'的波长变动范围b'小于阈值b,则认为此时的雷达系统受到周围环境的干扰或存在人为的恶意攻击。

一种车载毫米波雷达的目标检测方法.pdf
本发明公开一种车载毫米波雷达的目标检测方法。所述方法包括:对回波信号进行杂波滤波处理;利用多谱勒滤波器组对经杂波滤波处理后的回波信号进行多谱勒滤波处理;根据杂波分布规律,基于恒虚警原理确定目标检测门限,若前方路段的坡度小于设定的阈值,杂波幅度服从瑞利分布;否则,杂波幅度服从K分布;基于所述门限进行目标检测:若回波信号幅度大于所述门限,则目标存在。本发明解决了现有技术因采取同一种概率分布描述杂波分布,当前方道路坡度较大时因杂波分布规律描述不准确,导致由此确定的目标检测门限不合适,从而影响目标检测精度的问题。

车载毫米波雷达技术及测试方法.docx
车载毫米波雷达技术及测试方法一、前言车载毫米波雷达技术是近年来智能化汽车中不可或缺的一个重要技术,其中包括了车辆感知、行车安全、自动驾驶等多个方面。本文将介绍车载毫米波雷达技术的基本原理、系统架构以及测试方法。二、车载毫米波雷达技术基本原理车载毫米波雷达技术的基本原理是利用毫米波频段(30GHz-300GHz)的电磁波进行探测。毫米波在空气中传播时与水分子相互作用,能够将目标物体的反射信号与周围环境的干扰信号区分开来。由于毫米波波长短,能够实现高方向性的探测。车载毫米波雷达技术通常采用调频连续波(FMCW

一种基于车载毫米波雷达的多目标分类方法.pdf
本发明公开了一种基于车载毫米波雷达的多目标分类方法,首先对雷达获取到的不同目标的IF信号进行采样,转换为帧信号,对帧信号进行二维傅里叶变换,归一化后得到距离‑多普勒图;由此构建距离‑多普勒图样本集;其次构建混合级联神经网络分类器,用距离‑多普勒图样本集作为输入对混合级联神经网络分类器进行有监督的学习,获得各支路上分类器的网络参数,最后得到一个能够进行多目标分类的分类器,对雷达获取的目标IF信号进行分类。该方法通过混合级联分类器,克服了级联分类器应用场景的局限性,能够对多种目标类别进行分类。