
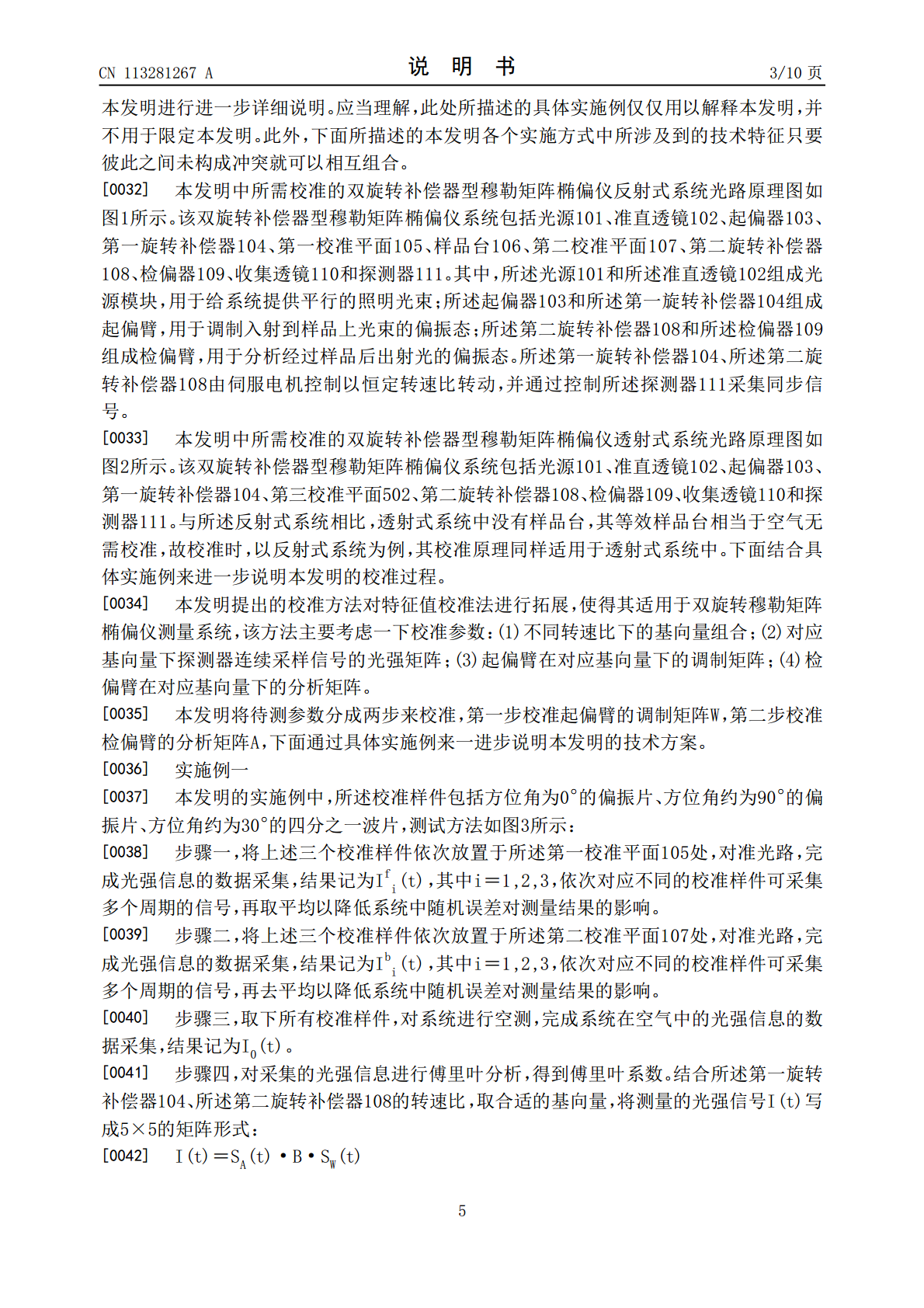
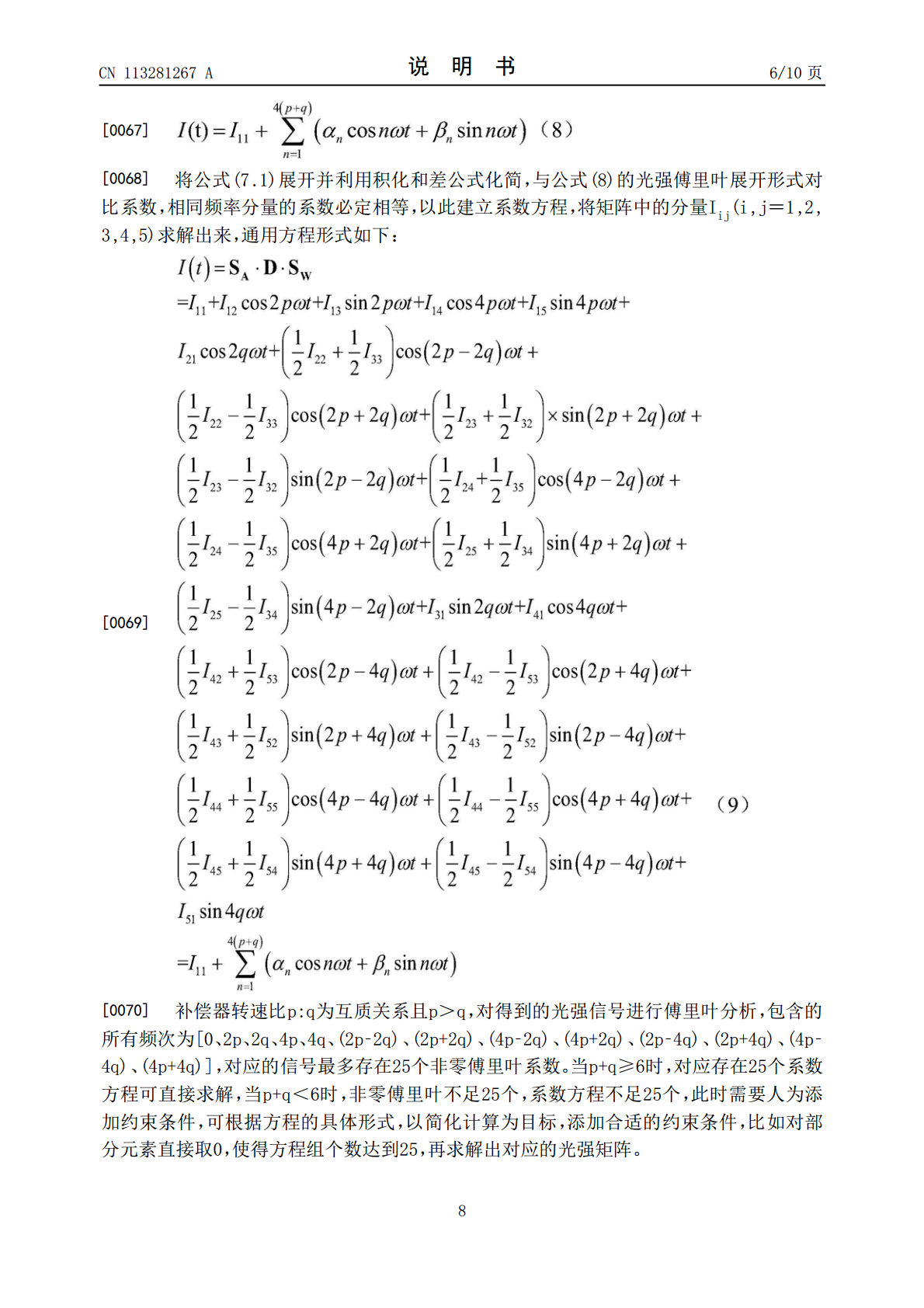
一种双旋转补偿器型穆勒矩阵椭偏仪系统参数的校准方法.pdf

是你****晨呀


1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种双旋转补偿器型穆勒矩阵椭偏仪系统参数的校准方法.pdf
本发明公开了一种双旋转补偿器型穆勒矩阵椭偏仪系统参数的校准方法,属于精密光学测量仪器系统校准领域,该方法包括将多个校准样件依次放置于第一旋转补偿器和第二旋转补偿器之间的校准平面,采集多个校准样件的光强信息;对所述光强信息进行傅里叶分析获得所述光强信息的傅里叶系数,结合所述傅里叶系数建立所述光强信息的矩阵形式函数;使用特征值校准法求解光强信息的矩阵形式函数,得到校准后的起偏臂的调制矩阵和检偏臂的分析矩阵,从而完成系统参数的校准。本发明提出的双旋转补偿器型穆勒矩阵椭偏仪系统参数的校准方法无需对系统进行建模,可
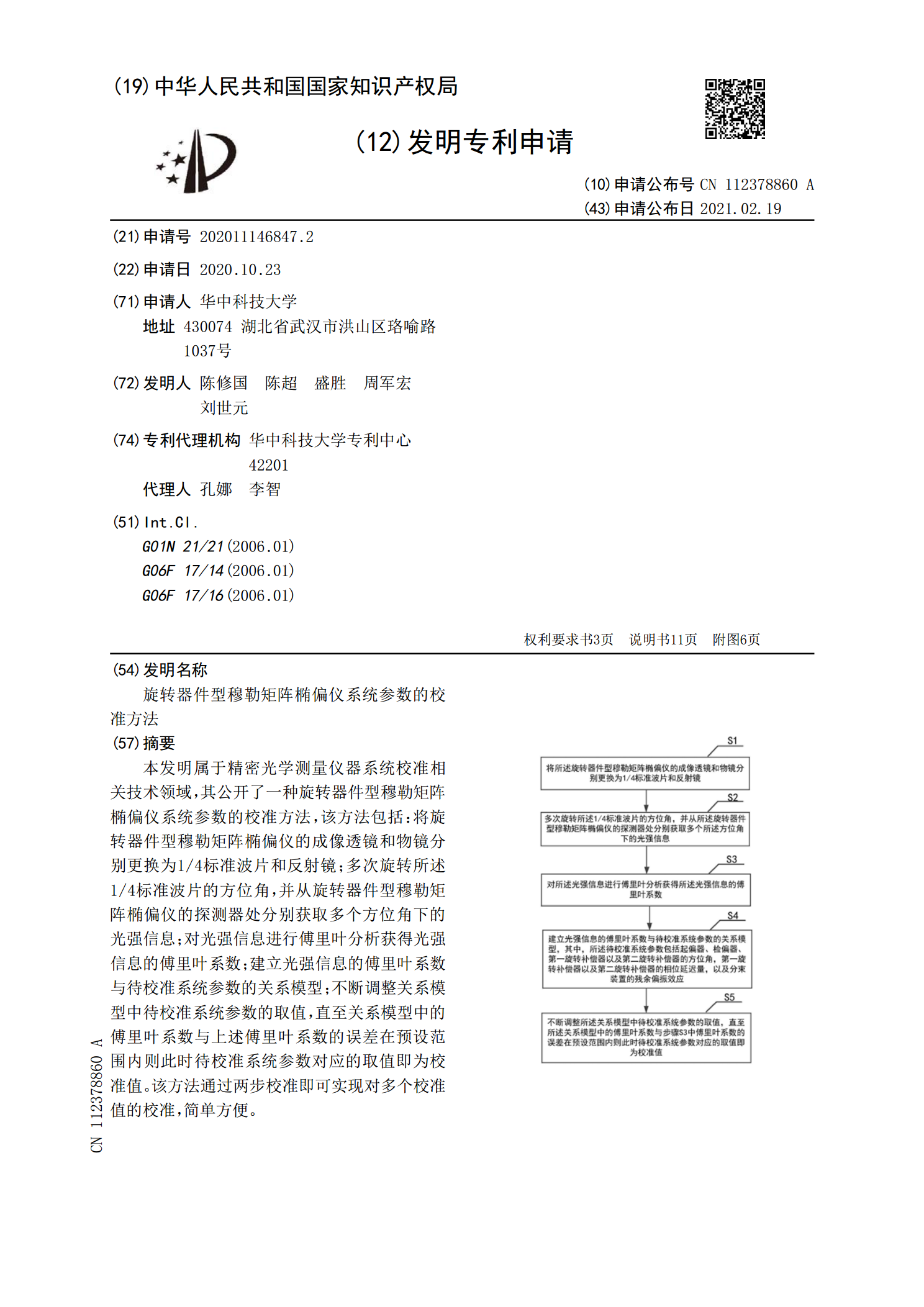
旋转器件型穆勒矩阵椭偏仪系统参数的校准方法.pdf
本发明属于精密光学测量仪器系统校准相关技术领域,其公开了一种旋转器件型穆勒矩阵椭偏仪系统参数的校准方法,该方法包括:将旋转器件型穆勒矩阵椭偏仪的成像透镜和物镜分别更换为1/4标准波片和反射镜;多次旋转所述1/4标准波片的方位角,并从旋转器件型穆勒矩阵椭偏仪的探测器处分别获取多个方位角下的光强信息;对光强信息进行傅里叶分析获得光强信息的傅里叶系数;建立光强信息的傅里叶系数与待校准系统参数的关系模型;不断调整关系模型中待校准系统参数的取值,直至关系模型中的傅里叶系数与上述傅里叶系数的误差在预设范围内则此时待校

一种双旋转补偿器穆勒矩阵椭偏仪系统控制方法.pdf
本发明涉及一种双旋转补偿器穆勒矩阵椭偏仪系统控制方法,包括:步骤1、控制器同时输出驱动脉冲至第一电机与第二电机,将第一电机的编码器脉冲作为光谱仪的触发脉冲,并采集第一电机运转周期T、第二电机与第一电机的转速比m
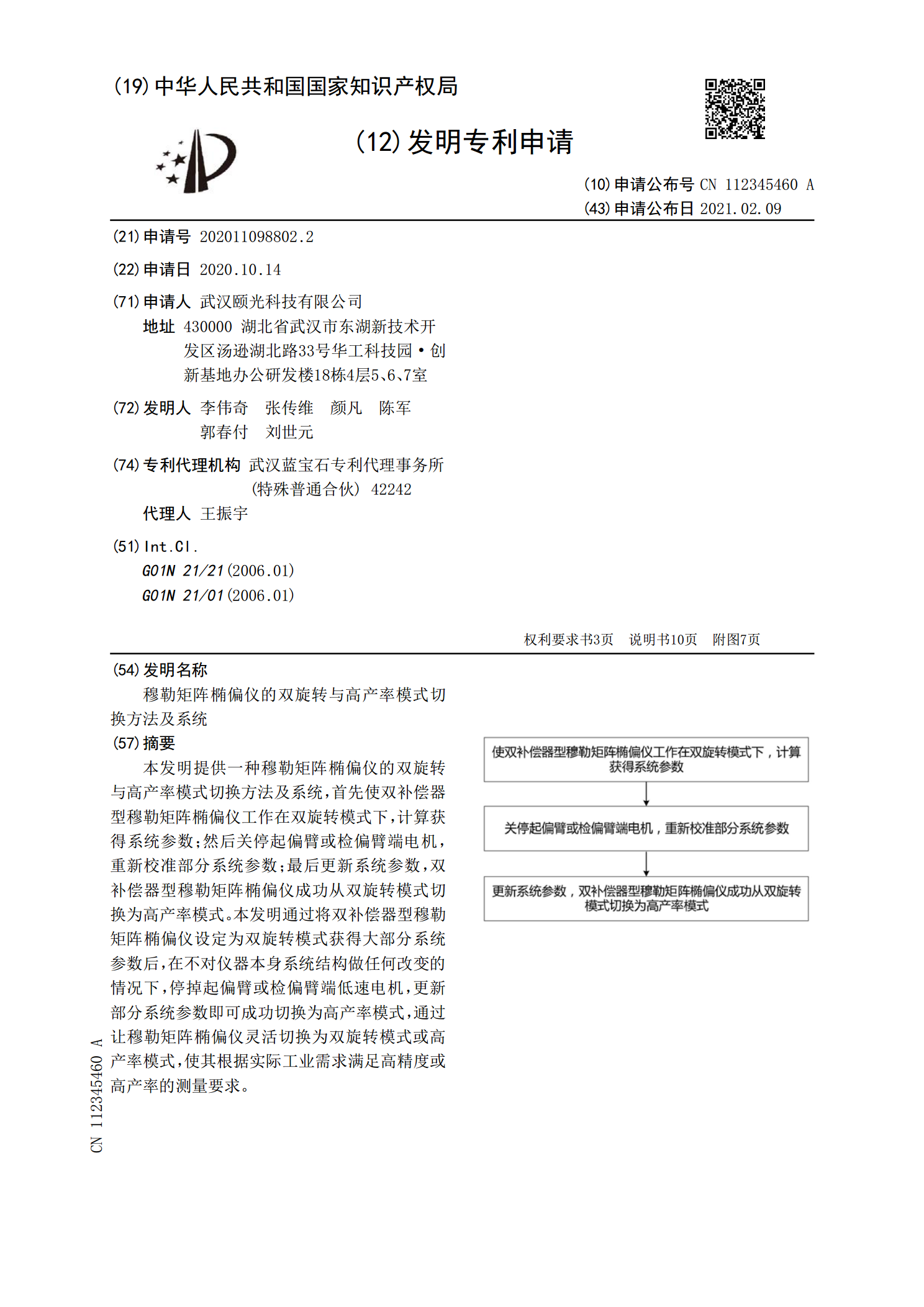
穆勒矩阵椭偏仪的双旋转与高产率模式切换方法及系统.pdf
本发明提供一种穆勒矩阵椭偏仪的双旋转与高产率模式切换方法及系统,首先使双补偿器型穆勒矩阵椭偏仪工作在双旋转模式下,计算获得系统参数;然后关停起偏臂或检偏臂端电机,重新校准部分系统参数;最后更新系统参数,双补偿器型穆勒矩阵椭偏仪成功从双旋转模式切换为高产率模式。本发明通过将双补偿器型穆勒矩阵椭偏仪设定为双旋转模式获得大部分系统参数后,在不对仪器本身系统结构做任何改变的情况下,停掉起偏臂或检偏臂端低速电机,更新部分系统参数即可成功切换为高产率模式,通过让穆勒矩阵椭偏仪灵活切换为双旋转模式或高产率模式,使其根据

一种自校准的全穆勒矩阵椭偏仪测量系统.pdf
本发明公开了一种自校准的全穆勒矩阵椭偏仪测量系统,属于光学测量仪器技术领域。其包括光源、起偏器、第一相位补偿器、检偏器、第二相位补偿器、光谱仪、样品台和各向同性且均匀的参考样品,各向同性且均匀的参考样品能够置于样品台上,还包括光谱仪数据采集频率设定模块、光强数据采集模块、实验傅里叶系数运算模块、理论傅里叶系数运算模块、第一相位补偿器相位延迟量运算模块、第二相位补偿器相位延迟量运算模块和全穆勒矩阵椭偏仪剩余工作参数运算模块。应用该自校准的全穆勒矩阵椭偏仪测量系统对待测样品进行测量时,测量结果更加准确。