
基于探测雷达的路面障碍检测方法、车辆及存储介质.pdf

书生****ma


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于探测雷达的路面障碍检测方法、车辆及存储介质.pdf
本发明公开了一种基于探测雷达的路面障碍检测方法、车辆及存储介质,其中,该方法应用于车辆,所述车辆上设置有成预设夹角的多个雷达天线,所述路面障碍检测方法包括:根据预设时分扫描策略,基于所述多个雷达天线向所述车辆的行车方向依次周期性发射不同扫描方向的探测波束;接收不同扫描方向所反射回的反射波束,根据所述反射波束确定所述行车方向上道路障碍的障碍物类型。本发明提高了车辆运用多普勒雷达进行路面障碍探测的行车安全性。

基于毫米波雷达的ETC车辆检测方法、系统及存储介质.pdf
本发明公开了一种基于毫米波雷达的ETC车辆检测方法、系统及存储介质,属于ETC技术领域,用于解决目前雷达无法兼顾极慢速及拥堵情况的车辆和正常通行的车辆检测、以及ETC跟车干扰、邻道干扰和通行效率低的技术问题,采用的技术方案为:预先存储检测区域无目标时,低速对应的多个多普勒维度频域数据;通过毫米波雷达实时检测所述检测区域内目标的速度,在目标速度大于第一预设速度时,进行时域相邻脉冲对消以滤除静止目标;在目标速度小于第二预设速度时,将存储的多普勒维度频域数据与当前目标对应的多普勒维度频域数据进行对消。本发明的方
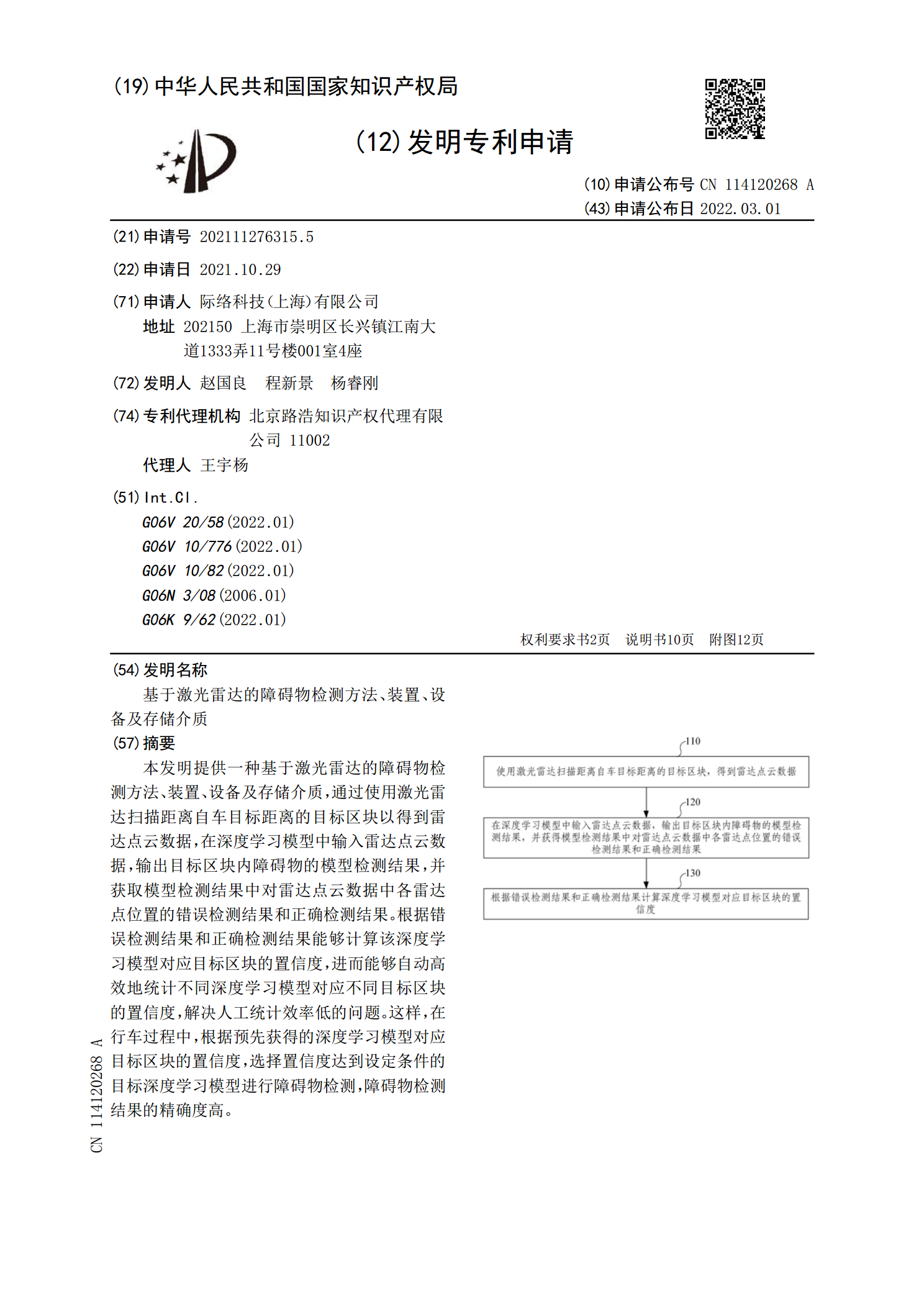
基于激光雷达的障碍物检测方法、装置、设备及存储介质.pdf
本发明提供一种基于激光雷达的障碍物检测方法、装置、设备及存储介质,通过使用激光雷达扫描距离自车目标距离的目标区块以得到雷达点云数据,在深度学习模型中输入雷达点云数据,输出目标区块内障碍物的模型检测结果,并获取模型检测结果中对雷达点云数据中各雷达点位置的错误检测结果和正确检测结果。根据错误检测结果和正确检测结果能够计算该深度学习模型对应目标区块的置信度,进而能够自动高效地统计不同深度学习模型对应不同目标区块的置信度,解决人工统计效率低的问题。这样,在行车过程中,根据预先获得的深度学习模型对应目标区块的置信度
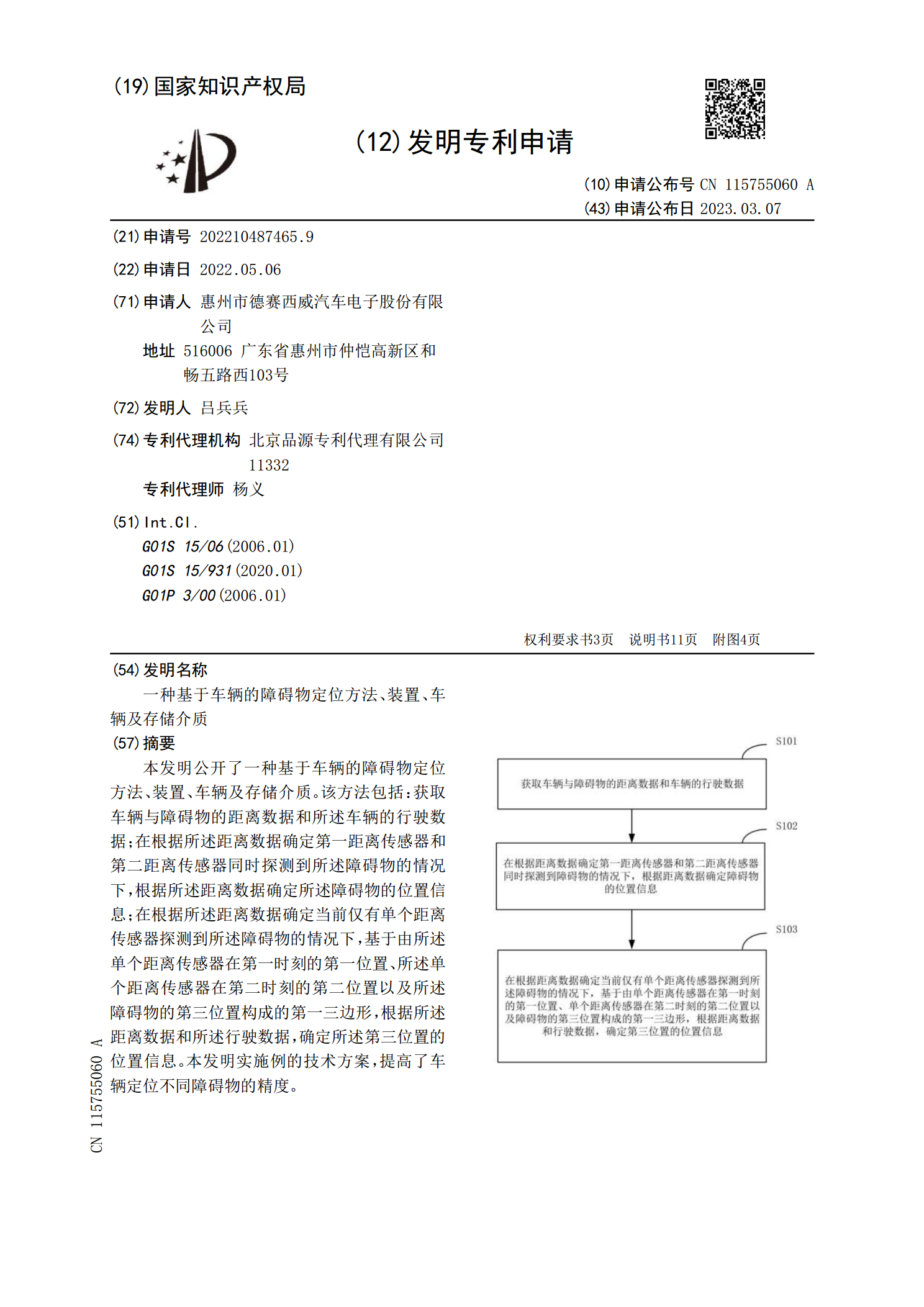
一种基于车辆的障碍物定位方法、装置、车辆及存储介质.pdf
本发明公开了一种基于车辆的障碍物定位方法、装置、车辆及存储介质。该方法包括:获取车辆与障碍物的距离数据和所述车辆的行驶数据;在根据所述距离数据确定第一距离传感器和第二距离传感器同时探测到所述障碍物的情况下,根据所述距离数据确定所述障碍物的位置信息;在根据所述距离数据确定当前仅有单个距离传感器探测到所述障碍物的情况下,基于由所述单个距离传感器在第一时刻的第一位置、所述单个距离传感器在第二时刻的第二位置以及所述障碍物的第三位置构成的第一三边形,根据所述距离数据和所述行驶数据,确定所述第三位置的位置信息。本发明
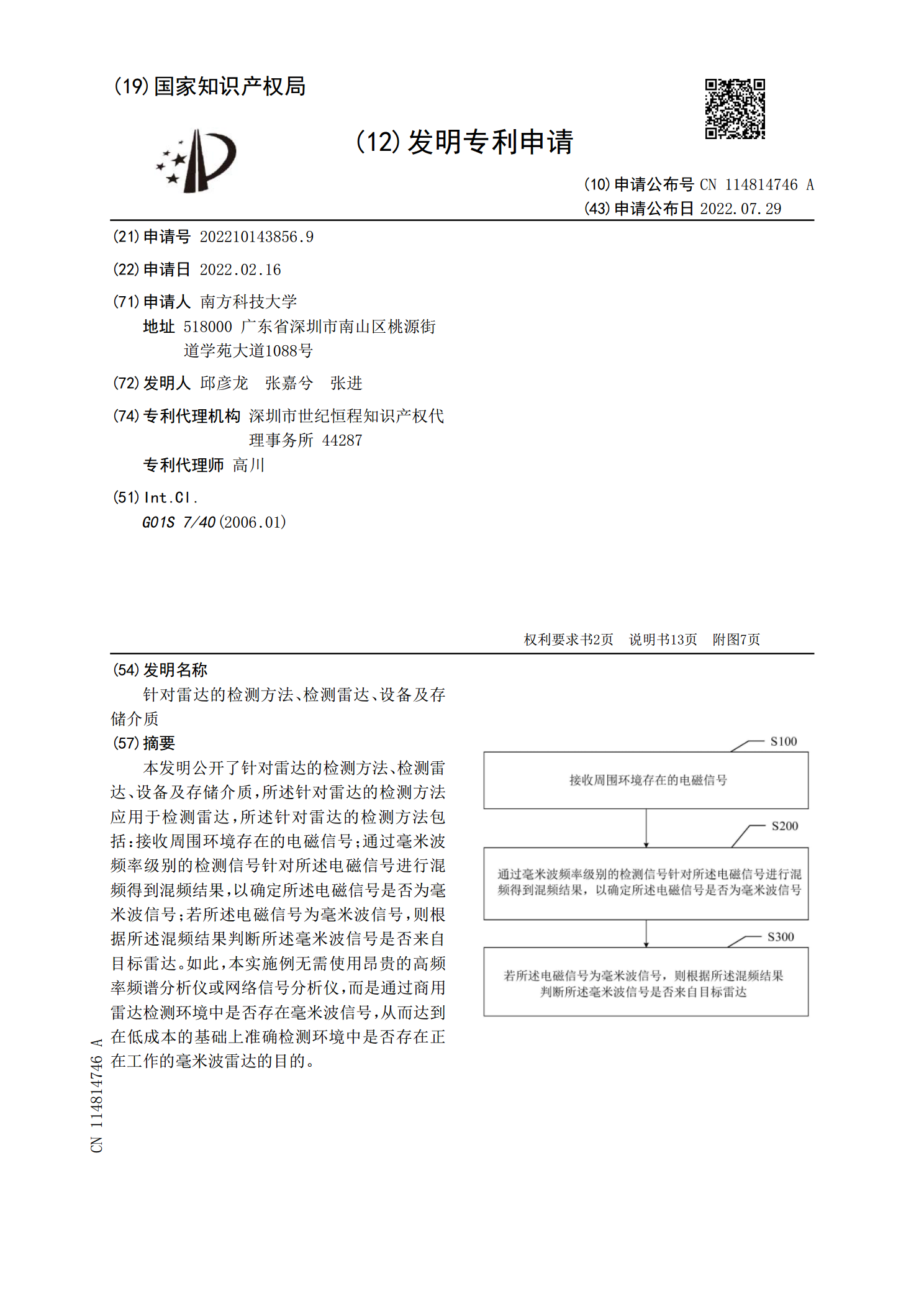
针对雷达的检测方法、检测雷达、设备及存储介质.pdf
本发明公开了针对雷达的检测方法、检测雷达、设备及存储介质,所述针对雷达的检测方法应用于检测雷达,所述针对雷达的检测方法包括:接收周围环境存在的电磁信号;通过毫米波频率级别的检测信号针对所述电磁信号进行混频得到混频结果,以确定所述电磁信号是否为毫米波信号;若所述电磁信号为毫米波信号,则根据所述混频结果判断所述毫米波信号是否来自目标雷达。如此,本实施例无需使用昂贵的高频率频谱分析仪或网络信号分析仪,而是通过商用雷达检测环境中是否存在毫米波信号,从而达到在低成本的基础上准确检测环境中是否存在正在工作的毫米波雷达