
一种标定工装.pdf

绮兰****文章


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种标定工装.pdf
本发明实施例公开了一种标定工装,其特征在于,包括:主支架、保护罩、盒体以及连接组件;所述主支架包括第一固定架、第二固定架以及立板,所述第一固定架固定在所述立板一面靠近上端位置,所述第二固定架固定在所述立板另一面靠近下端位置;所述盒体固定在所述第一固定架的上表面,用于罩设在捷联惯导组件的外部;所述保护罩套设在所述第一固定架外围;所述连接组件一端与所述主支架固定,另一端穿过所述保护罩,所述连接组件用于与所述待测船体连接。对捷联惯导组件、多普勒计程仪换能器和声相关计程仪换能器进行精准定位,提高潜航器导航的定位精

一种内参标定固定工装.pdf
本实用新型涉及相机内参标定设备技术领域,公开了一种内参标定固定工装,其包括底座,底座上且位于左右两侧对称设有安装座,底座上设有可位于安装座间左右移动的活动座,活动座上设有用于供待测工件放入的放置型腔,安装座间设有可开合的扣件,扣件用于将待测工件固定于放置型腔内。通过上述构造,使得扣件能够将待测工件固定于放置型腔内实现待测工件在固定工装上的固定,同时由于扣件的可开合设置,使得能够快速地进行待测工件在固定工装上的拆装。

一种高精度模拟单机标定工装.pdf
本实用新型提供了一种高精度模拟单机标定工装,包括大理石基准尺、高精度立方镜和把手。本实用新型在高精度模拟单机标定的过程中,能够将高精度模拟单机机械坐标系转换成标定工装上高精度立方镜光轴坐标系,在提高标定工作效率的同时,保证高精度模拟单机测量棱镜光轴坐标系与高精度模拟单机机械坐标系之间的高精度关系,更为后期的高精度模拟单机在卫星上的高精度装配提供必要的数据基础。
一种传感器标定测试工装.pdf
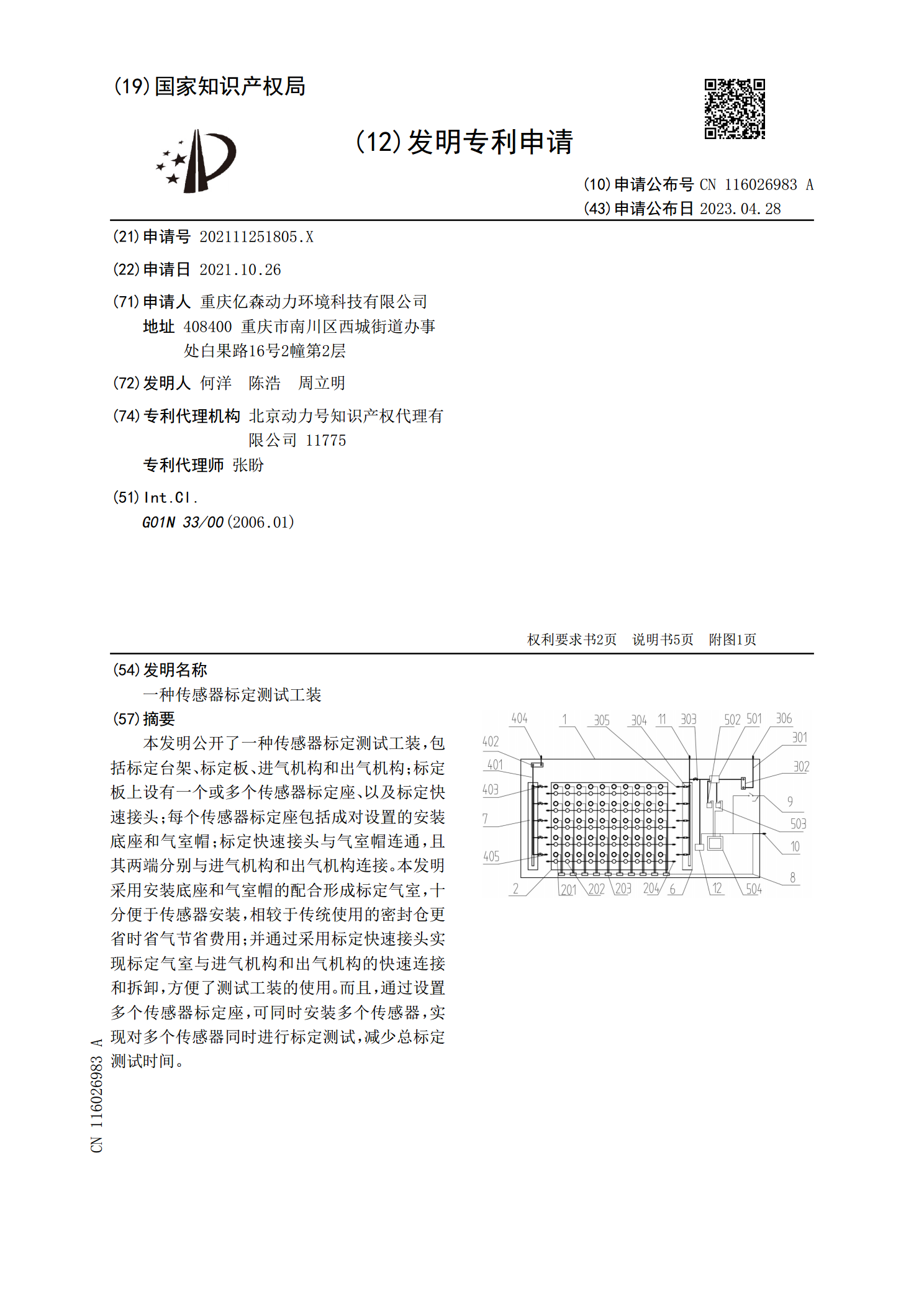
本发明公开了一种传感器标定测试工装,包括标定台架、标定板、进气机构和出气机构;标定板上设有一个或多个传感器标定座、以及标定快速接头;每个传感器标定座包括成对设置的安装底座和气室帽;标定快速接头与气室帽连通,且其两端分别与进气机构和出气机构连接。本发明采用安装底座和气室帽的配合形成标定气室,十分便于传感器安装,相较于传统使用的密封仓更省时省气节省费用;并通过采用标定快速接头实现标定气室与进气机构和出气机构的快速连接和拆卸,方便了测试工装的使用。而且,通过设置多个传感器标定座,可同时安装多个传感器,实现对多个

一种激光加工标定装置、标定方法、加工装置及加工方法.pdf
本发明公开了一种激光加工标定装置、标定方法、加工装置及加工方法,该标定装置包括:标定单元、相机单元和检测单元;所述标定单元包括多个标定点;所述相机单元,用于测量物镜到多个标定点的高度数据;所述检测单元,用于测量检测单元到多个标定点的高度数据;根据检测单元到多个标定点的高度数据,以及物镜到多个标定点的高度数据,判断激光加工前是否需要标定。本发明提高了激光切割的加工精度,具有良好的实际使用价值。