
一种机载雷达稀疏恢复类STAP算法中的字典校正方法.pdf

景福****90


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机载雷达稀疏恢复类STAP算法中的字典校正方法.pdf
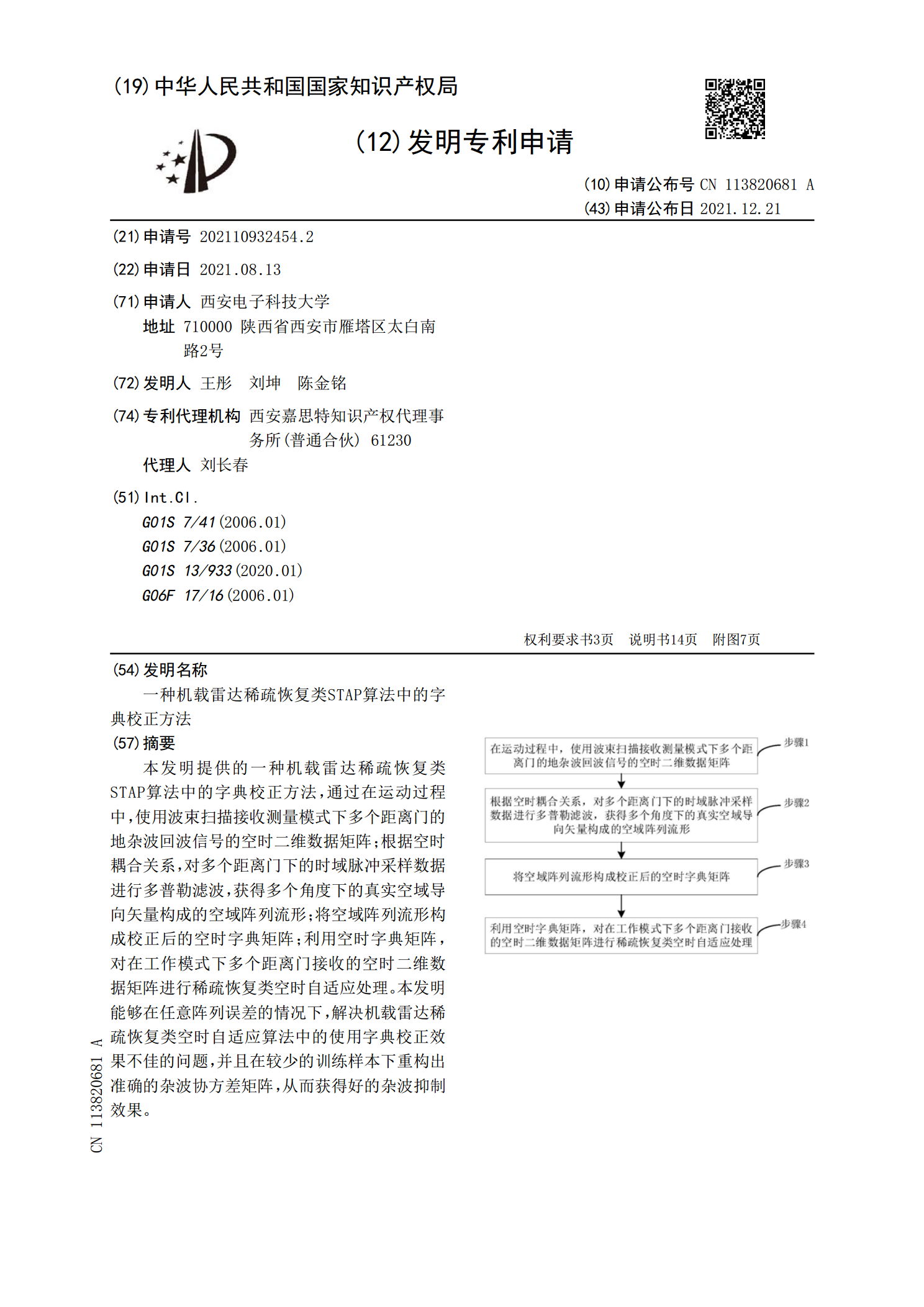
本发明提供的一种机载雷达稀疏恢复类STAP算法中的字典校正方法,通过在运动过程中,使用波束扫描接收测量模式下多个距离门的地杂波回波信号的空时二维数据矩阵;根据空时耦合关系,对多个距离门下的时域脉冲采样数据进行多普勒滤波,获得多个角度下的真实空域导向矢量构成的空域阵列流形;将空域阵列流形构成校正后的空时字典矩阵;利用空时字典矩阵,对在工作模式下多个距离门接收的空时二维数据矩阵进行稀疏恢复类空时自适应处理。本发明能够在任意阵列误差的情况下,解决机载雷达稀疏恢复类空时自适应算法中的使用字典校正效果不佳的问题,并

基于稀疏恢复的机载MIMO雷达STAP技术研究的开题报告.docx
基于稀疏恢复的机载MIMO雷达STAP技术研究的开题报告一、研究背景及研究意义随着雷达技术的不断发展,机载MIMO雷达技术在军事和民用领域中被广泛应用。机载MIMO雷达技术具有高渗透性、高识别精度和高抗干扰性等优点,在目标探测和识别、反舰导弹和防御等方面有着广泛的应用。STAP(空时自适应处理)算法是机载MIMO雷达技术的重要组成部分,能够解决多目标信号干扰和噪声等问题,提高雷达系统的探测精度。目前,基于稀疏恢复的机载MIMO雷达STAP技术得到了广泛关注。稀疏恢复技术是一种基于压缩感知的信号处理方法,通

基于改进SAMP的MIMO雷达STAP稀疏恢复算法.docx
基于改进SAMP的MIMO雷达STAP稀疏恢复算法基于改进SAMP的MIMO雷达STAP稀疏恢复算法摘要:多输入多输出(MIMO)雷达系统在现代雷达领域得到广泛的应用,并且在目标检测和信号处理方面取得显著的效果。空时自适应处理(STAP)是一种常用的MIMO雷达信号处理技术,它可以有效地抑制地物回波和杂波信号,提升雷达探测性能。在STAP算法中,稀疏恢复问题是一个重要的研究课题。本文提出了一种基于改进稀疏近似匹配追踪(SAMP)算法的MIMO雷达STAP稀疏恢复算法。通过对SAMP算法的优化和改进,实现了

MIMO-STAP稀疏字典降维方法.docx
MIMO-STAP稀疏字典降维方法一、引言多输入多输出空时协同处理(MultipleInputMultipleOutputSpace-TimeAdaptiveProcessing,MIMO-STAP)已经成为现代雷达系统中的一个重要研究方向。MIMO-STAP算法的目的是在多通道雷达系统上提高雷达目标检测和跟踪的性能。在使用MIMO-STAP进行雷达信号处理时,雷达通过同时在多个天线上接收信号,通过协同处理和鲁棒性检测来降低杂波水平和提高雷达目标检测率。本文将主要介绍MIMO-STAP算法中的稀疏字典降维

机载雷达Krylov子空间STAP算法研究的综述报告.docx
机载雷达Krylov子空间STAP算法研究的综述报告机载雷达通过发送并接收回波波形,可以获取目标的位置、速度、距离、高度等信息。雷达信号会经过一系列的干扰,因此需要使用空间时域自适应信号处理(STAP)算法,对信号进行抑制干扰,提高雷达探测的性能。Krylov子空间STAP算法是一种较为先进的STAP算法,它基于Krylov子空间方法,在估计目标特征和抗干扰方面有着良好的性能,在雷达应用中得到了广泛的研究和应用。Krylov子空间STAP算法的核心思想是利用Krylov子空间方法估计信号子空间和干扰子空间